导弹自动驾驶仪的设计是一个高度复杂的工程问题,涉及控制理论、惯性导航、制导算法、空气动力学和实时计算等多学科交叉。其核心任务是保证导弹精确、鲁棒地跟踪制导系统生成的输入指令,使导弹根据控制指令产生控制力矩和控制力来改变导弹的攻角,进而改变速度矢量方向,使导弹稳定飞行直至命中目标。
1.自动驾驶仪的主要作用
1.改善弹体等效阻尼;
2.保持系统稳定性;
3.加快弹体响应频率;
4.提高抗干扰能力;
5.精确、鲁棒地跟踪输入指令。
2.自动驾驶仪的核心功能与性能要求
(1)姿态稳定与控制
(2)制导指令跟踪
(3)抗干扰能力
(4)高机动适配
核心目标:满足导弹最大机动过载要求;
性能要求:空空导弹30g~50g、空地导弹 10g~20g,控制律无失稳。
3.设计流程
(1)导弹动力学建模
六自由度模型(6DOF):建立包含平移和旋转运动的非线性方程;
气动参数辨识:通过风洞试验或 CFD 获取升力、阻力、力矩系数;
执行机构模型:舵机/推力矢量动态响应(带宽、延迟、饱和)。
(2)控制架构选择
①经典控制
PID(适用于线性段);
三回路自动驾驶仪(俯仰 / 偏航 / 滚转独立控制)。
②现代控制
LQR/LQG:线性二次型调节器(优化控制能量与状态误差);
滑模控制(SMC):强鲁棒性,适合非线性系统;
自适应控制:应对气动参数不确定性(燃料消耗导致质量变化)。
③智能控制
(3)传感器融合
IMU(惯性测量单元):提供角速率和加速度;
GPS / 北斗:补充位置和速度信息;
导引头(末端制导):红外/雷达测量目标相对运动;
滤波器:卡尔曼滤波(EKF/UKF)融合多源数据,抑制噪声。
(4)制导 - 控制一体化设计
比例导引(PN)或增强比例导引(APN)生成加速度指令;
过载控制:加速度指令转换为舵偏角(考虑导弹动态延迟)。
(5)抗饱和与容错设计
舵面分配算法:避免多舵面协同时的饱和;
故障检测与重构:传感器或执行器失效时的备份策略。
4.典型自动驾驶仪结构
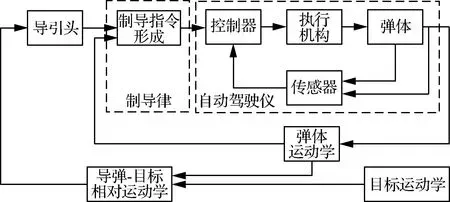
(1)外环(加速度控制)
·输入:制导系统指令过载;
·输出:俯仰角速率指令。
(2)内环(角速率控制)
·通过陀螺反馈稳定角速率,生成舵偏指令。
(3)舵机执行
·驱动舵面偏转,实现气动力矩控制。
5.不同弹种自动驾驶仪设计差异化
(1)空空导弹自动驾驶仪
核心需求:高机动、高响应、全空域(低空~高空)适配;
控制律:优先滑模变结构控制 / 自适应滑模控制,强调抗气动扰动和参数偏差;
执行机构:气动舵 + 小型推力矢量(高机动型号),舵机响应速度≥60°/s;
传感器:光纤 IMU + 高动态速率陀螺,强调高动态响应(适配 50g 以上过载);
设计侧重:小型化、轻量化、快速性,控制周期≤10ms。
(2)巡航导弹自动驾驶仪
核心需求:高精度轨迹跟踪、长航时、低空突防;
控制律:优先 H∞鲁棒控制+PID 前馈补偿,强调轨迹跟踪精度和鲁棒性;
执行机构:气动舵(大展弦比),侧重舵偏角控制精度,而非响应速度;
传感器:激光IMU+BDS/GPS+气压高度计+地形匹配,多传感器融合抑制惯导漂移;
设计侧重:高精度、低功耗、长航时,加入地形跟随/地形回避控制模块。
(3)弹道导弹自动驾驶仪
核心需求:大姿态角稳定、高速再入、抗强扰动;
控制律:滑模控制+H∞控制,再入段加入扰动观测器,抑制气动热扰动和风切变;
执行机构:燃气舵(起飞段)+ 气动舵(再入段);
传感器:激光 IMU+星载惯导,强调抗振动、抗高温(再入段温度达千度级,需做热防护);
设计侧重:大姿态角解算、抗高温/抗扰动、全飞行段参数自适配。
(4)空地导弹自动驾驶仪
核心需求:低空突防、抗地面电磁干扰、精准打击;
·控制律:自适应鲁棒控制,加入低空突防控制模块(掠海/掠地);
执行机构:气动舵,侧重低速 / 低空下的舵面效率;
传感器:MEMS / 光纤 IMU + 抗干扰卫星导航 + 毫米波雷达(辅助),做电磁屏蔽设计,抗地面雷达干扰;
设计侧重:抗电磁干扰、低空气动扰动抑制、小型化。
6.导弹自动驾驶仪设计发展趋势
(1)智能化控制:融入强化学习、深度学习,实现自主自适应控制,无需人工调试参数,可自主适应复杂环境和弹体参数变化;
(2)小型化/集成化:采用 MEMS 微机电技术、SOC 集成技术,实现自动驾驶仪的 “芯片化”,体积和重量大幅降低,适配小型战术导弹;
(3)全空域/全速度适配:针对高超音速导弹(5Ma 以上),研发高超音速自动驾驶仪,解决高超声速下的气动非线性、热扰动、黑障区通信问题;
(4)多传感器融合与自主感知:融入毫米波雷达、机器视觉,实现导弹的自主环境感知,不仅能稳定姿态,还能自主规避障碍、跟踪目标;(5)高可靠性与长航时:研发新型弹载电源(如燃料电池)和低功耗处理器,实现巡航导弹等长航时弹种的自动驾驶仪长航时工作。


