你是不是也这样?坐进朋友的新能源车,听他兴奋地介绍:“我这个车有ACC,还能开NOA!”你表面上点头称赞,心里却在嘀咕:这些字母到底啥意思?和传统的“定速巡航”有啥不同?
别担心,今天我们就用最直白的大白话,把这些常听见却搞不懂的术语,一个个拆解清楚。你会发现,从解放右脚到放开双手,汽车智能化的每一步,都藏在这些字母里。
第一章:从“定速”到“自适应”——巡航控制的进化
最早让开车变轻松的,是 CC(定速巡航)。你可以简单理解它为“自动油门”。设定一个速度,比如100km/h,车就会自己保持这个速度往前开,你的右脚可以从油门踏板上解放出来。但它很“愣”,不会看前车,也不会自己刹车,前车慢了你还得自己踩刹车介入。这是最基础的功能。

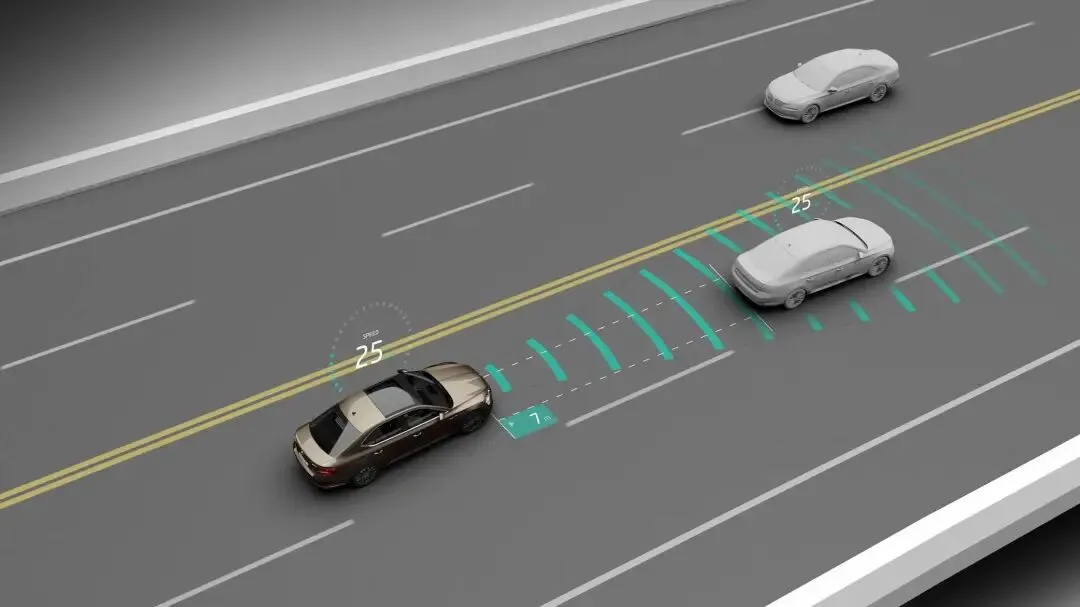
后来,更聪明的 ACC(自适应巡航) 出现了。它就像是给车装上了一双“眼睛”(通常是车头的雷达和摄像头)。它不仅会自己控制油门,还能“看见”前车。前车快,它就跟着快;前车慢,它自动减速甚至刹车,始终和你设定的安全距离。这时候,你的双脚基本可以休息了,但手必须紧握方向盘,因为车子不会自己转弯。
第二章:车道上的“隐形轨道”——横向控制登场
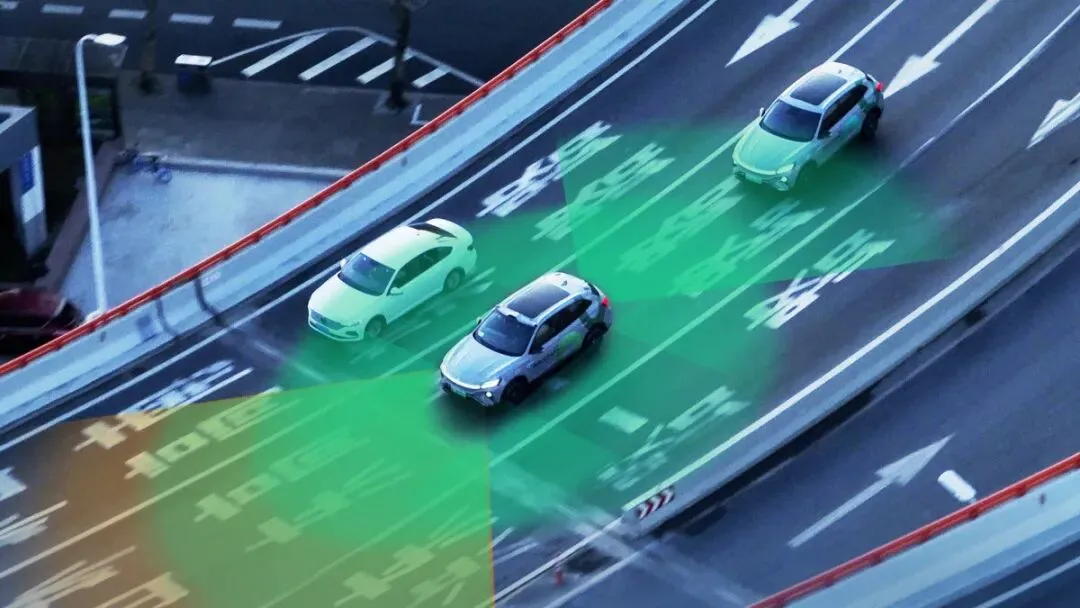
ACC只管前后,不管左右。车子在车道里“画龙”怎么办?这就需要 LCC(车道居中辅助) 登场了。它通过摄像头识别车道线,并自动轻微调整方向盘,让车始终保持在车道中央行驶,像一个隐形的轨道。有了ACC+LCC,车就能在一定条件下,同时控制油门、刹车和方向盘,实现简单的“跟车巡航”,这是市面上很多L2级辅助驾驶的核心。
但LCC能力有强有弱。弱一些的,弯大了就跟不住;强一些的,比如特斯拉的基础Autopilot,应对高速弯道就比较从容。这背后是算法和芯片算力的较量。

于是,LCC+(增强版车道居中辅助) 来了。它在LCC的基础上进一步升级,不仅能“看见”车道线,还能识别路上的锥桶、施工栏等障碍物,进行避让。在一些有清晰引导线的路口,它甚至能跟着线自动转弯。部分厂商的LCC+还加入了打灯自动变道的功能。你可以把它看作是一个“高配版”的LCC,是向更高级功能过渡的形态。
第三章:“领航”时代——从高速到城区的终极挑战
如果说ACC和LCC是“辅助”你开车,那 NOA(导航辅助驾驶) 的目标就是“代替”你完成大部分驾驶操作。设置好目的地,车辆可以根据导航路线,自主实现:超车、变道、进出匝道、识别限速并调整、应对路口等复杂操作。
这里必须吐槽:各家厂商为了品牌化,给这个相似的功能起了不同的名字,比如小鹏叫NGP,华为叫NCA,蔚来叫NOP……但本质都属于高阶导航辅助驾驶的范畴。我们暂且用接受度较广的NOA来统称。
NOA也分场景,最常见的是 高速NOA 。高速路况相对封闭和规范,是实现这一功能的“第一战场”。而 城区NOA ,则是目前智驾领域的“珠穆朗玛峰”。城区的路况极端复杂:鬼探头、加塞、人车混流、不规则路口、突然出现的施工区……这对系统的感知能力、预测算法和决策速度提出了地狱级的要求。因此,能实现可靠城区NOA的车型,往往代表了当前智能驾驶的最高水平,价格自然也更高。
这不仅仅是软件升级。从CC到NOA的跃迁,背后是整个先进制造业的支撑:更精密的毫米波雷达和激光雷达、更高分辨率的摄像头、算力呈指数级增长的芯片、确保系统绝对可靠的车规级电子电气架构……每一个环节,都是制造业尖端技术的集成。
思考与尾声
技术的进步清晰可见:从只管油门,到管住油门刹车,再到管住方向,最后串联所有,尝试规划全局。但我们必须清醒:无论名字多么炫酷,现阶段所有这些功能,都仍是“辅助驾驶”而非“自动驾驶”。驾驶员永远是安全的第一责任人。
当你的车具备了这些能力,你是否真的敢在拥堵的环路上放开双手?当系统做出的变道决策比你更激进时,你会信任它还是接管?车企在疯狂“内卷”智驾等级的同时,我们普通用户该如何建立对技术的合理预期和正确使用习惯?
技术的列车正在狂飙,但我们的认知和安全意识,是否跟上了它的速度?欢迎在评论区分享你对智能驾驶的看法和使用体验。
公告:各位小主,由于网站www.amtbbs.org访问量越来越大,服务器负荷严重过载需要维护!我们需要引进外部资本扩大我们的运营规模;同时由于众所周知的原因我们需要逐步过渡到新域名:www.amtbbs.com;衷心感谢大家一直以来的厚爱和支持!------小艾
内容来源:网络
本期编辑:小艾
论文投稿:作为领先的高科技先进制造技术产业服务平台,AMT接受学术论文投稿;稿件的发布完全是公益和免费的;论文投稿邮箱:info@amtbbs.org
版权声明:AMT尊重版权并感谢每一位作者的辛苦付出与创作;除无法溯源的作品,我们均在文末备注了来源;如文章、视频、图片、文字涉及版权,请原创作者第一时间联系我们,我们将根据您提供的证明材料确认版权后立即删除内容或按国家规定标准支付稿酬!




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
