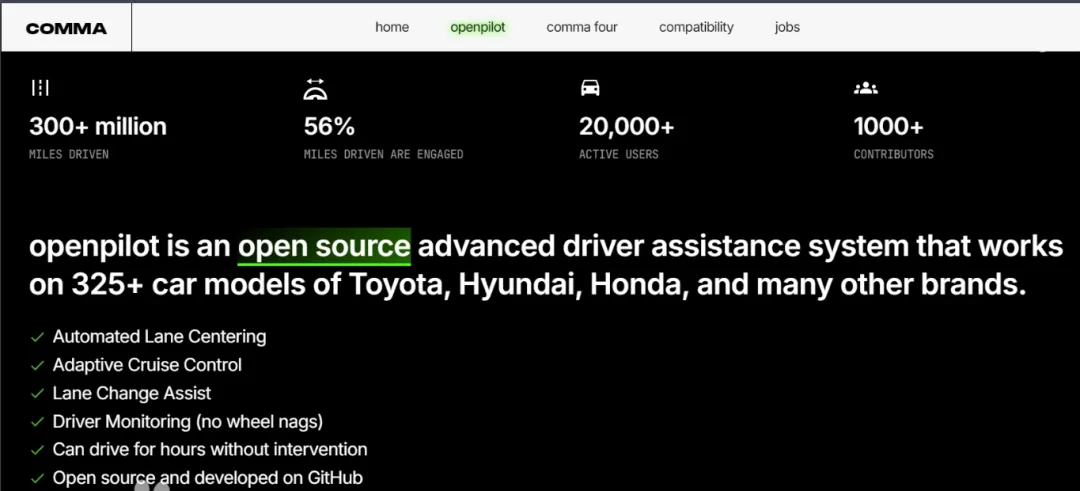
先说一下oenpilot。这个就是后装(改装车)用的,普通汽车用户只需要加装兼容硬件,即可配合 Openpilot,实现“自动驾驶”。该软件是开源的,目前支持市面上325+的车型。值得注意的是,该开源项目更多出于“实验”目的。用户完全依靠该自动驾驶软件,会有一定风险。而且出了任何事故,都需要车主自己去负责。
国内也是有车型可以适配的,不过毕竟是后装功能软件,各种绕不开的bug都是存在的,需要打补丁。这就让我想到一个问题,我们实验性的去玩玩还行,你真的敢把生命交给这个后装软件么?从这点来说,车厂出的辅助驾驶和后装辅助驾驶,还是有本质区别的。
另外,问题中的“OPENPOLIT只需要一台智能手机+一根数据线”这个明显是错误的。
硬件部分
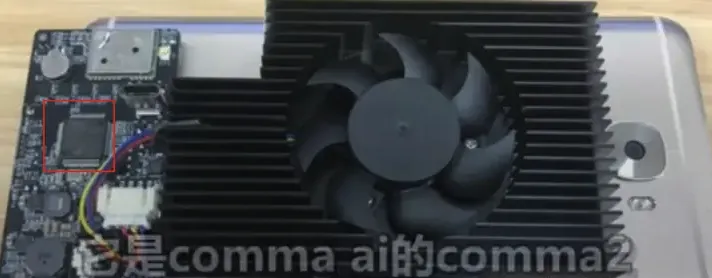
Openpilot 的硬件主要包括 EON 设备,这是一台运行 NEO 系统(高度定制的安卓系统)和各种算法的核心设备。Panda 车载接口负责从车辆的 CAN 总线 提取数据,并与车载雷达配合,收集环境信息供 Supercombo 模型使用。
添加图片注释,不超过 140 字(可选)
安装openpilot需要以下硬件设备:(以福特的 Escape 2020-22为例)
1个Ford Q3连接器
1个comma 3X设备
1个comma power v3电源适配器
1个线束盒
1个支架
1根1.5英尺直角OBD-C电缆
而这套硬件设备也是不便宜的,最新的如下:999美元

第二个,问题中说“能实现视觉无人驾驶技术,达到l3级别”,这个也明显是错误的。
软件部分
Openpilot 的核心是其软件系统,包含各种算法和中间件。最为关键的是名为 Supercombo 的大模型,它负责处理车辆的自适应巡航、车道保持等功能。主要功能列表如下:
自适应巡航控制(ACC):通过计算机视觉和雷达技术,Openpilot 能够实现自适应巡航,自动调整车辆速度,以保持与前车的安全距离。
自动车道居中(ALC):利用车载摄像头和算法,系统可以帮助车辆始终保持在车道中央行驶,减少驾驶员的操作压力。
前向碰撞警告(FCW):系统实时监测前方道路情况,当检测到潜在的碰撞风险时,会发出警告提醒驾驶员采取行动,增强驾驶安全性。
车道保持辅助(LKA):通过计算机视觉技术,Openpilot 能够检测车道线并保持车辆在车道内行驶,防止车辆无意偏离车道。
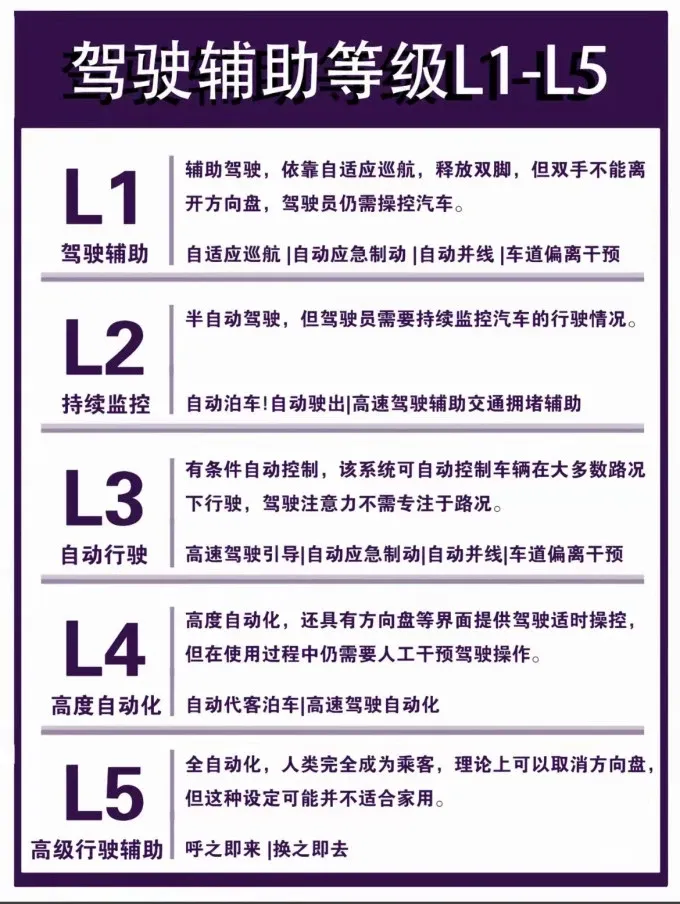
我们都知道,L3级自动驾驶的核心定义是“有条件自动驾驶”。也就是在特定设计运行域内,车辆可以独立完成全部动态驾驶任务,驾驶员无需持续监控环境,但必须在系统请求时及时接管。这是事故责任从驾驶员转移至车企的重大转变,决定了其安全架构必须达到“车规级”可靠。
为了达到这种可靠性,冗余控制成为必选项目,通常车企都会配备感知冗余,决策冗余,电源冗余,通讯冗余。几乎再造一套驾驶系统的概念。根据中国国家标准《智能网联汽车 自动驾驶系统通用技术要求》(GB/T 44721-2024)以及行业实践,L3系统必须在关键子系统上实现全链路冗余,以确保在任何单一部件失效时,系统仍能安全运行或平稳退出。
安全冗余 = 生命冗余!而后装的openpilot,显然无法达到这种程度。
总之,后装辅助驾驶的openpilot并不是能保证我们行驶安全的,为此我们普通驾驶者也绝不敢将生命交付于它。在我看老,价格并不便宜的openpilot正是那个“食之无味,弃之可惜”的鸡肋罢了。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
