在自动驾驶开源平台领域,Autoware作为全球首个“All-in-One”全栈开源自动驾驶软件平台,凭借其完备的技术体系、持续的迭代升级以及广泛的行业适配性,确立了其在该领域的标杆地位,成为汽车行业工程师、科研机构及相关企业不可或缺的技术工具与研发底座。本文简单介绍Autoware的基本信息、系统架构、版本迭代、优势及局限。
基本信息与起源
Autoware 是世界领先的开源自动驾驶软件项目,提供从感知、定位、预测、规划到控制的完整自动驾驶功能栈,基于 Linux 和 ROS(机器人操作系统)构建,采用模块化架构,支持从 L2 到 L4 级别的自动驾驶开发与部署。
首次发布
2015 年,由日本名古屋大学加藤伸平教授(Shinpei Kato)开发推出,是世界上第一个 "All-in-One"(多合一)自动驾驶开源软件。
管理机构
2020 年成立非盈利的Autoware 基金会(Autoware Foundation),确保项目独立于单一公司,由全球社区共同维护。
许可协议
Apache License 2.0,允许商业使用和二次开发。
核心定位
为自动驾驶研究者和开发者提供灵活、可靠的开发平台,降低技术门槛,加速自动驾驶技术落地。
系统架构
一、核心架构理念:微自治(microautonomy)
Autoware的灵魂是微自治架构——将复杂自动驾驶功能解耦为多个职责明确、边界清晰的小型自治模块,而非单一固定流水线:
每个模块拥有清晰的输入输出接口,可像积木般自由组合。
支持按需替换单个模块(如用深度学习感知替换传统感知),无需重构整个系统。
便于并行开发、测试与维护,加速技术迭代与创新。
兼容不同硬件平台与传感器配置,降低适配成本。
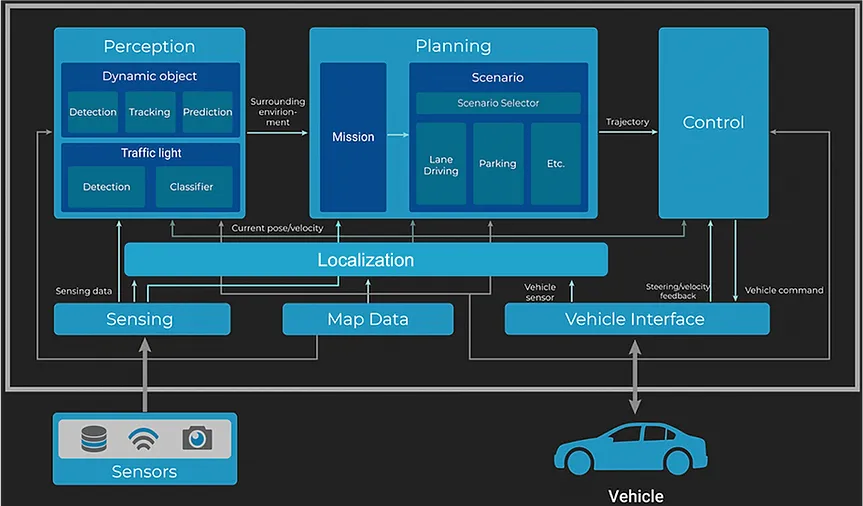
二、分层架构设计
Autoware采用四层架构,自下而上清晰划分职责边界:
层级 | 核心组件 | 主要功能 |
|---|
硬件抽象层 | 传感器驱动、车辆接口、CAN通信 | 统一硬件接入标准,隔离底层硬件差异,提供标准化数据输出 |
中间件层 | ROS2、DDS、消息接口 | 分布式通信基础,支持Topic/Service/Action三种通信模式,确保实时性与可靠性 |
核心功能层 | 七大核心模块(感知、定位、地图等) | 实现自动驾驶核心算法,完成环境理解与决策控制 |
系统管理层 | 监控、诊断、日志、安全模块 | 保障系统稳定运行,处理异常,记录数据,确保功能安全 |
三、七大核心功能模块详解
Autoware的核心能力由七大功能模块组成,形成完整的自动驾驶闭环:
1. 传感(Sensing)模块
核心功能:多传感器数据采集、预处理与同步
关键组件:激光雷达驱动、摄像头驱动、毫米波雷达驱动、IMU/GNSS驱动、传感器校准、时间同步
输出:标准化点云、图像、雷达数据,为上层提供高质量输入
2. 地图(Map)模块
核心功能:高精度地图加载、解析与管理,提供环境参考框架
关键组件:地图加载器、地图分割、地图查询服务、车道级拓扑分析
支持格式:OpenDRIVE、Lanelet2(Autoware推荐标准)
输出:局部/全局地图数据、车道信息、交通规则等
3. 定位(Localization)模块
核心功能:融合多源数据实现厘米级高精度定位
关键组件:GNSS/IMU融合(卡尔曼滤波)、激光雷达匹配(NDT/ICP)、视觉SLAM、GPS-RTK
输出:车辆实时位姿(x,y,z,roll,pitch,yaw)、定位置信度、地图匹配结果
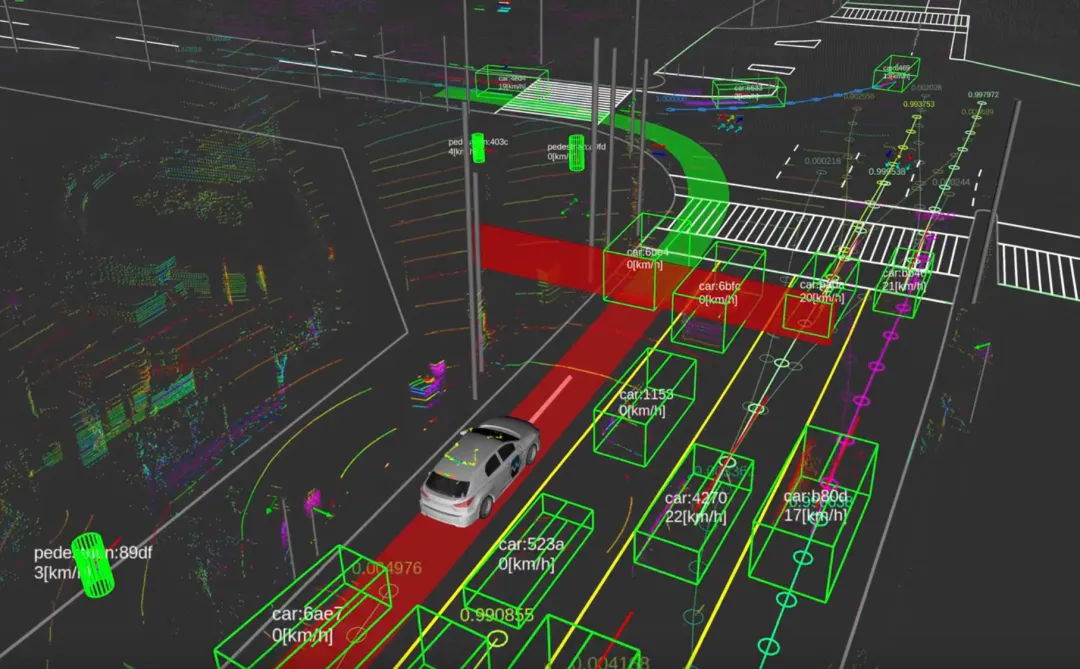
4. 感知(Perception)模块
核心功能:环境理解,识别障碍物、交通标志、车道线等关键要素
关键组件:目标检测:2D/3D 目标识别(车辆、行人、骑行者)、语义分割:图像 / 点云语义理解、多传感器融合、交通灯识别、车道线检测
输出:检测目标列表、语义地图、障碍物信息、交通规则理解结果
5. 预测(Prediction)模块
核心功能:预测周围交通参与者未来行为,为规划提供依据
关键组件:运动模型预测、意图推理、轨迹生成
输出:障碍物未来轨迹、行为概率分布
6. 规划(Planning)模块
核心功能:生成安全、可行、舒适的行驶路径与轨迹
关键组件:全局路径规划:基于起点终点生成宏观路线、局部轨迹规划:避障、车道保持、变道决策(Lattice Planner/Freespace Planner)、行为决策:处理交通规则、路口通行、汇入汇出等复杂场景
输出:平滑的车辆行驶轨迹(包含速度、加速度信息)
7. 控制(Control)模块
核心功能:将规划轨迹转化为车辆控制指令,实现精准跟踪
关键组件:MPC控制器、PID控制器、车辆动力学模型、纵向/横向控制
输出:加速、制动、转向指令,通过车辆接口发送到底层执行器
8. 车辆接口(Vehicle Interface)
核心功能:连接Autoware与车辆底层控制系统,实现指令下发与状态反馈
关键组件:车辆控制接口、状态监测、故障诊断
通信协议:支持CAN总线、Ethernet、ROS 2消息等多种通信方式
四、通信机制与接口标准
Autoware基于ROS 2与DDS构建通信体系,确保模块间高效协作:
三种核心通信模式
Topic:用于高频实时数据传输(如传感器数据、车辆状态),采用发布-订阅模式
Service:用于请求-响应式交互(如地图查询、参数配置),适合低频操作
Action:用于长时间任务执行(如路径规划、车辆控制),支持进度反馈与任务取消
标准化消息接口
Autoware定义了autoware_xxx_msgs系列消息类型,确保模块间数据格式统一:
感知消息:DetectedObjects、TrafficLightResult
规划消息:Trajectory、Path
控制消息:ControlCommand、VehicleState
定位消息:PoseWithCovarianceStamped
五、安全与扩展设计
功能安全保障
模块级故障检测与隔离,防止单点故障扩散
支持硬件/软件冗余设计,关键组件双备份
符合ISO 26262标准,提供安全开发工具链
灵活扩展机制
Autoware Core:稳定可靠的核心组件,经过严格测试验证
Autoware Universe:社区贡献的创新组件,支持快速实验与迭代
支持第三方算法集成,兼容TensorRT、ONNX等深度学习框架
六、数据流闭环
Autoware的典型数据流路径:
传感器采集数据 → Sensing模块预处理与同步
Localization模块融合数据 → 输出车辆精确位姿
Perception模块处理感知数据 → 输出障碍物与环境信息
Map模块提供高精度地图 → 结合定位结果构建环境模型
Prediction模块预测目标行为 → 为规划提供动态环境信息
Planning模块生成轨迹 → 考虑交通规则与避障需求
Control模块转化为控制指令 → 通过Vehicle Interface下发车辆
车辆执行指令 → 状态反馈至各模块,形成闭环控制
版本迭代
Autoware的发展历程可分为三个主要阶段:ROS 1时代(Autoware.AI)、ROS 2过渡阶段(Autoware.Auto)和ROS 2成熟阶段(Autoware Core/Universe)。
1. Autoware.AI(ROS 1 时代)
项目 | 详情 |
|---|
核心基础 | 基于ROS 1.0,世界首个自动驾驶all-in-one开源软件 |
发布时间 | 2015年8月正式发布,最后版本1.14.0(2021年) |
版本现状 | 2022年底停止维护,已进入End-of-Life状态 |
核心特点 | 功能全面但架构松散,无严格软件质量标准,模块间依赖复杂 |
适用场景 | 自动驾驶初学者入门、高校科研验证、快速原型开发 |
优势 | 文档丰富、社区成熟、学习资源多、部署门槛低 |
劣势 | 实时性不足、无严格安全机制、难以商业化部署 |
2. Autoware.Auto (ROS 2 过渡版本)
项目 | 详情 |
|---|
核心基础 | 基于ROS 2,作为Autoware.AI的下一代继任者 |
发布时间 | 2020年开始开发,2021年发布1.0.0版本(专注自动代客泊车ODD) |
版本现状 | 已停止独立开发,功能已整合到Autoware Core中 |
核心特点 | 采用现代软件工程最佳实践,重写代码库,定义明确的ODD场景,严格的测试覆盖 |
适用场景 | 高安全性应用、自动代客泊车(AVP)、货物配送等特定场景 |
优势 | 架构清晰、接口标准化、可重现性强、确定性高 |
劣势 | 功能有限、仅覆盖特定ODD、生态尚未成熟 |
3. Autoware Core (ROS 2 稳定版)
项目 | 详情 |
|---|
核心基础 | 基于ROS 2,继承Autoware.Auto的稳定化策略 |
发布时间 | 2022年开始推出,持续更新中 |
版本现状 | 活跃维护,作为Autoware生态的核心基础组件 |
核心特点 | 轻量化ROS 2核心,强调实时性和安全性(ISO 26262兼容),支持Apex.AI中间件 |
适用场景 | 车规级硬件部署、安全关键应用、商业原型开发 |
优势 | 代码充分测试、可靠性高、基础组件稳定、支持车规级要求 |
劣势 | 功能较少、依赖部分商业组件、扩展灵活性有限 |
4. Autoware.Universe (ROS 2 开发者版)
项目 | 详情 |
|---|
核心基础 | 基于ROS 2,作为Autoware Core的扩展模块 |
发布时间 | 2022年开始推出,持续更新中 |
版本现状 | 活跃开发,是当前Autoware的主要功能开发分支 |
核心特点 | 模块可插拔(使用tier_projects管理),集成前沿算法(如BEVFusion),支持多种传感器融合 |
适用场景 | 前沿技术验证、复杂场景开发、多模态感知测试、自定义功能开发 |
优势 | 功能全面、更新频繁、社区贡献活跃、支持最新ROS 2版本(Humble/Galactic) |
劣势 | 代码质量要求相对宽松、稳定性不如Core版本、对硬件要求较高 |
版本对比分析
1. 技术架构对比
特性 | Autoware.AI | Autoware.Auto | Autoware.Core | Autoware.Universe |
|---|
ROS版本 | ROS 1.0 | ROS2 (Foxy/Galactic) | ROS2 (Humble) | ROS2 (Humble) |
软件架构 | 模块化但松散 | 严格分层架构,定义明确的接口 | 轻量化核心,最小依赖 | 可扩展架构,模块可插拔 |
消息系统 | ROS 1原生消息 | 重新设计的标准化消息 | 与Auto兼容的消息系统 | 扩展消息类型,支持更多传感器 |
构建系统 | Catkin | Colcon | Colcon | Colcon |
安全机制 | 基本安全功能 | 安全设计开始引入 | ISO 26262兼容设计 | 可选安全组件 |
实时性 | 非实时优先 | 实时性增强 | 硬实时支持 | 可配置实时性 |
2. 功能覆盖对比
功能模块 | Autoware.AI | Autoware.Auto | Autoware.Core | Autoware.Universe |
|---|
感知 | 激光雷达为主,摄像头辅助 | 多传感器融合,支持深度学习 | 核心感知组件 | 完整感知栈,支持BEVFusion等先进算法 |
定位 | GNSS+IMU+激光雷达SLAM | 优化的定位算法,支持多传感器融合 | 核心定位组件 | 完整定位栈,支持多种地图格式 |
规划 | 多种路径规划算法 | 针对AVP优化的规划算法 | 核心规划组件 | 完整规划栈,支持复杂场景 |
控制 | 基础车辆控制 | 模型预测控制(MPC) | 核心控制组件 | 完整控制栈,支持多种车辆 |
地图 | 支持标准HD地图 | 标准化地图接口 | 核心地图组件 | 完整地图栈,支持动态地图 |
车辆接口 | 基础接口 | 标准化车辆接口 | 核心车辆接口 | 完整车辆接口,支持多种协议 |
3. 适用场景对比
应用场景 | 推荐版本 | 理由 |
|---|
学术研究/高校教学 | Autoware.AI | 学习资源丰富,部署简单,适合快速验证概念 |
快速原型开发 | Autoware.Universe | 功能全面,支持最新算法,开发灵活 |
车规级部署 | Autoware.Core | 轻量化,实时性强,安全性高,ISO 26262兼容 |
自动代客泊车 | Autoware.Auto | 针对AVP场景优化,功能稳定 |
货物配送 | Autoware.Universe | 支持低速场景,功能全面 |
初学者入门 | Autoware.AI | 社区成熟,文档丰富,学习曲线平缓 |
优势 & 局限
核心优势
1、自动驾驶开源界成熟的全栈方案
从感知、定位、规划、控制到地图、车端接口全覆盖,是业内最早、生态最完整的开源自动驾驶平台。
2、完整覆盖「科研→原型→车规→量产」全链路
通过 AI → Auto → Core/Universe 完成了从 ROS1 到 ROS2、从玩具级到车规级的演进。
3、社区与产业背书强
历史久、资料多,有 Tier IV、丰田等产业方支持,落地案例和适配资源丰富。
4、架构分层清晰,可按需裁剪
Core 保稳定、Universe 保新功能,兼顾安全性与迭代速度。
局限分析
1、版本割裂、迁移成本高
AI/Auto/Core/Universe 接口不兼容,工程化迁移工作量大。
2、纯开源版本离真正量产仍有差距
功能、稳定性、冗余、故障处理、ISO 26262 合规仍需大量自研补齐。
3、稳定性与新功能难以兼得
Core 稳但功能少,Universe 全但质量管控松。
4、实时性与车规安全依赖外部组件
硬实时、功能安全依赖 Apex.AI 等商业中间件,纯开源方案不够 “车规”。
5、文档与工程化碎片化
不同版本教程、工具链不统一,中高阶开发门槛高。
Autoware 是目前最适合做自动驾驶快速开发与验证的开源全栈方案,但纯开源版本只能到原型和车规验证阶段,真正量产必须走 Core + 定制化方案。
声明 |部分图文来源于网络,如有侵权,请联系修改或删除;文章仅代表个人观点,如有不妥,也请联系修改或删除。