自动驾驶出事,谁担责?一张表说清责任归属
- 2026-03-21 01:31:26

引言:技术越先进,责任越模糊?
自动驾驶技术正以前所未有的速度融入我们的交通系统。从L2级辅助驾驶到L4级高度自动驾驶,车辆的“自主性”不断增强,人类驾驶员的控制权逐步让渡;目前L2级辅助驾驶已广泛应用,L4级高度自动驾驶仍在部分城市的限定区域试点推进,尚未全面融入公共交通系统。然而,当一辆处于自动驾驶状态的汽车发生事故时,一个根本性问题随之浮现:责任该由谁承担?
是车主?车企?软件供应商?地图服务商?还是监管机构?这个问题不仅关乎个体权益,更触及法律体系、产品设计伦理与产业生态的深层结构。

❝本文所有分析基于技术原理、法律逻辑与行业共识。旨在提供思考框架,非法律意见。具体案件请以司法机关认定为准。
一、自动驾驶等级是责任划分的起点
国际通用的SAE J3016标准将自动驾驶分为L0–L5六个等级。责任边界随自动化程度变化而动态迁移。关键在于:谁在“主导驾驶行为”?
❝注:L3是责任分水岭:在系统设计运行域(ODD)内,责任开始向车企转移;若超出ODD使用,仍以人类驾驶员责任为中心。
二、事故责任的四大核心主体
在自动驾驶事故中,责任通常涉及以下四类主体:
1. 车辆使用者(车主/乘客)- 是否遵守使用说明? - 是否在系统要求时及时接管? - 是否擅自改装或禁用安全功能,且该行为与事故存在直接因果关系?
2. 整车制造商(OEM)- 硬件是否可靠(传感器、制动、转向)? - 是否明确告知系统能力边界? - 是否在系统设计运行域(ODD)内,提供足够接管预警时间?
3. 自动驾驶系统供应商(含算法、感知、决策模块)- 软件是否存在逻辑漏洞? - 训练数据是否覆盖长尾场景? - 是否通过充分仿真与实测验证?
4. 第三方服务提供方- 高精地图是否更新滞后? - V2X通信是否因自身故障中断(非车企冗余设计缺陷导致)? - 云平台是否下发错误指令?
这些主体之间可能存在合同关系、供应链关系或监管关系,责任认定需结合具体事实链判断。
三、典型事故场景与责任推演
为更清晰说明,我们构建三种常见事故场景,并分析责任可能分布。
场景1:L2车辆未识别前方静止障碍物,撞上施工锥桶
- 事实:车主开启L2功能,在高速上双手离开方向盘;系统未对前方静止锥桶做出制动。
- 关键点:多数低阶L2系统不承诺识别静止物体(用户手册已明确注明);若为高阶L2系统,明确标注支持静止物体识别却未响应,则系统存在缺陷;车主未监控路况。
- 责任倾向:
- 车主:未履行监督义务 → 主要责任
- 车企:若未在界面/手册中显著提示“不识别静止障碍物” → 次要责任
- 软件商:若算法存在已知缺陷但未修复 → 连带责任
❝此类事故在现实中高频发生,若车主未履行监督义务(如双手离开方向盘),多数判例支持车主担主责;若车主正常监督且及时尝试接管,系统仍未响应,则车企承担主要责任。
场景2:L4无人出租车在城区路口误判行人轨迹,导致碰撞
- 事实:车辆处于完全自动驾驶模式,按试点要求配备安全员(或部分试点无安全员);系统将奔跑儿童误判为“非穿越意图”,未刹车。
- 关键点:L4系统承诺处理城市复杂场景;无人员介入可能。
- 责任倾向:
- 车企/运营公司:作为服务提供方 → 主要责任
- 软件供应商:若感知模型在训练中缺乏儿童奔跑样本 → 技术责任
- 车主:无(乘客非操作者)
- 监管方:若已明确要求特定场景测试,车企未按要求完成,则监管方无直接责任;若监管存在场景测试遗漏,需承担政策完善责任(非直接事故责任)
❝此时责任已完全从“人”转向“系统提供方”。
场景3:高精地图未更新,L3车辆按旧路线驶入封闭道路
- 事实:车辆依赖高精地图导航,地图服务商未同步道路封闭信息;且车企系统过度依赖单一地图数据源,未配备视觉/雷达等冗余感知手段,未触发接管请求。
- 关键点:地图是自动驾驶关键输入源;系统是否具备冗余感知能力?
- 责任倾向:
- 地图服务商:数据更新延迟 → 直接责任
- 车企:若系统过度依赖单一数据源,缺乏视觉/雷达校验 → 设计缺陷责任
- 用户:无过错
❝此案例凸显“供应链责任”的复杂性。
四、责任认定逻辑图
以下流程图展示事故发生后,责任判定的基本逻辑路径:
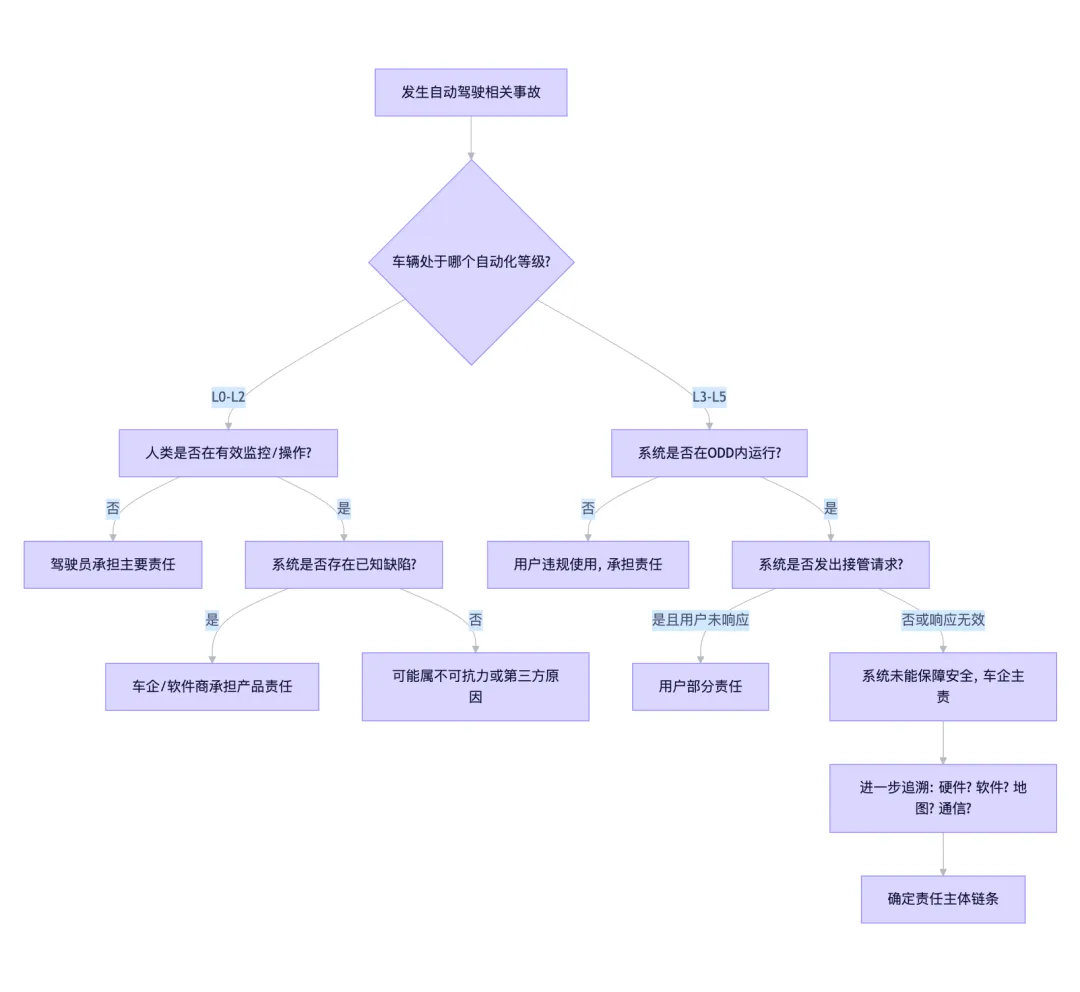
ODD(Operational Design Domain):设计运行域,即系统被允许运行的环境条件(如天气、道路类型、速度范围等)。
该图表明:责任不是非此即彼,而是基于“行为合规性”与“系统可靠性”的双重检验。
五、当前法律框架的挑战
尽管技术日新月异,法律体系仍显滞后。国内已出台《自动驾驶汽车道路测试与示范应用管理办法》《民法典》侵权编等相关规定,初步明确了部分责任边界,但针对L3及以上级别自动驾驶的专项立法仍显滞后,难以覆盖所有复杂场景。主要问题包括:
1. 产品责任 vs 交通责任的冲突
传统交通事故适用《道路交通安全法》,强调驾驶员过错;而自动驾驶事故更接近“产品缺陷”,应适用《产品质量法》或《民法典》侵权编。两者归责原则不同(过错责任 vs 无过错责任),导致司法实践混乱。
2. 黑箱问题:算法不可解释性
深度学习模型的决策过程难以完全追溯,虽国内已推动算法可解释性规范,但部分复杂场景下(如极端天气、突发路况),算法决策的合理性仍难以精准界定,给举证带来困难——是系统失误,还是极端场景下的合理反应?
3. 多主体责任的切割难题
一辆车涉及数十家供应商。若事故由激光雷达故障引发,是雷达厂商责任?集成商责任?还是整车厂未做充分测试?合同条款常限制追偿,消费者维权成本高。
4. 保险机制尚未适配
现有车险以“人”为核心定价。未来或需发展“产品责任险+网络安全险+运营责任险”的复合保险模式,但保费分摊机制尚不成熟。
六、责任划分建议框架
为便于理解,我们将不同条件下各主体的责任权重进行示意性评估(非法律结论,仅作逻辑参考):
❝说明:★越多表示责任可能性越高(5星为极高)。实际案件需结合证据链综合判断。注:若行人存在违规行为(如闯红灯),车企责任可相应减轻,具体结合过错程度判定;若车企未履行网络安全防护义务,自身承担主要责任。
七、走向清晰责任体系的三条路径
要解决“自动驾驶出事谁担责”的困局,需多方协同推进:
1. 立法明确“系统责任主体”
建议在法律中明确:L3及以上级别自动驾驶系统在ODD内运行期间,车辆制造商或运营方为法定“驾驶人”;目前深圳、北京等试点城市的地方立法已率先探索这一规则,可逐步推广。这已在德国、日本等国立法中体现。
2. 强制数据记录与共享机制
强制数据记录与共享机制:国内已要求自动驾驶车辆安装EDR(事件数据记录器),建议进一步推行“EDR+ADS-DVR”双重记录模式,记录传感器原始数据、系统决策日志、接管请求等。事故后由独立第三方调取分析,避免厂商垄断数据。
3. 建立分级认证与保险池
- 对不同ODD下的自动驾驶系统进行安全认证;
- 设立行业共担的赔偿基金,用于快速赔付受害者,再内部追责;
- 推广“按里程付费”的责任保险模式。
结语:责任不清,技术难行
自动驾驶不是单纯的技术问题,而是社会系统的重构。责任界定的模糊地带,会一定程度抑制创新、影响公众信任;唯有通过立法完善、技术规范、行业协同,逐步厘清责任边界,才能让技术真正服务于安全出行。
未来,或许每辆自动驾驶汽车出厂时,都会附带一份“责任说明书”——明确在何种条件下,谁为安全兜底。在此之前,厘清责任逻辑,是我们迈向智能交通时代必须完成的功课。
❝郑重说明:本文所有分析基于技术原理、法律逻辑与行业共识。旨在提供思考框架,非法律意见。具体案件请以司法机关认定为准。

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 数据分享 | 2026年2月汽车(SUV/轿车/MPV)销量排行榜
- 方盒子车新推荐:家庭新硬派SUV iCAR V27全新上市,16.98万起
- 博越REV来了,10万级SUV突然不讲武德,这车真能一周只充一次电?
- 10万能买中型SUV了,这事儿真不是画饼,我试坐后排腿真能伸直.
- 长城新车比问界M9还大,国产SUV要逆天了
- 凯迪拉克“掀桌子”了!豪华SUV跌至14万,多层隔音+9AT,还看啥CRV
- 一轿车以90km/h时速抢黄灯,撞飞闯红灯电动自行车致1人死亡,司机被公诉
- 五米二大型SUV,3.6秒破百+120km_h稳稳刹停,腾势N9把性能和安全都拉满了?
- 15-25万SUV推荐:16.98万起全新上市的全能硬派iCAR V27怎么样?
- 6.59万买A+级轿车,配置比卡罗拉还多,它真不飘?
