
🐉 龙哥读论文知识星球来了!自动驾驶的“光谱眼”技术日新月异,想紧跟前沿不掉队?星球每日更新AI领域论文、资讯、招聘、招博、开源代码,一站式干货,每日2分钟刷完即赚!👇扫码加入「龙哥读论文」知识星球,前沿干货、实用资源一站式拿捏~

龙哥推荐理由:
这篇论文没有提出惊天动地的新模型,但它做了一件更接地气、对行业更有价值的事:系统性地梳理了高光谱成像(HSI)技术在自动驾驶领域落地所面临的核心挑战,并基于真实的HSI-Drive数据集,展示了从数据采集、处理到模型优化的完整实践路径。对于关注传感器融合、自动驾驶感知系统落地的同学来说,这是一份难得的“避坑指南”和“可行性研究报告”。
原论文信息如下:
论文标题:
CHALLENGES IN HYPERSPECTRAL IMAGING FOR AUTONOMOUS DRIVING: THE HSI-DRIVE CASE
发表日期:
2026年03月
发表单位:
University of the Basque Country (巴斯克大学)
原文链接:
https://arxiv.org/pdf/2603.25510v1.pdf
项目链接:
https://ipaccess.ehu.eus/HSI-Drive/ (包含分割视频演示)
高光谱驾驶感知:机遇与挑战并存
想象一下,你的自动驾驶汽车不仅能看到红绿灯和行人,还能“看见”前方路面是干的、湿的还是结了一层薄冰;能分辨出远处模糊的物体是塑料路障还是金属护栏;甚至在夜间或雨雾天气,也能清晰识别出车道线和交通标志的材质。这听起来像是科幻,但高光谱成像技术正试图将这种“超视觉”能力赋予机器。
简单来说,我们日常用的RGB相机就像只带了红、绿、蓝三副“眼镜”,看到的是混合后的颜色。而高光谱成像则像给相机戴上了一副“光谱眼镜”,能把光线分解成几十甚至上百个连续的、非常窄的波段。每个物体在不同波段下的反射或吸收特性(即“光谱特征”)就像它的指纹一样独特。因此,高光谱相机获取的不再是一张“彩色照片”,而是一个包含了丰富光谱信息的“数据立方体”。
然而,理想很丰满,现实却很骨感。巴斯克大学的这篇论文就像一份给AI开发者们的“实地踩坑报告”,详细剖析了想把高光谱相机装到车上所面临的一箩筐挑战:
环境挑战:自动驾驶场景是“非受控”的。光照条件瞬息万变(晴天、阴天、黄昏),场景深度范围极广(从近处车牌到远处高楼),物体高速运动。这些因素会让获取的光谱数据质量大打折扣。
硬件挑战:车载设备要求相机小型、坚固、节能,还要能像普通摄像头一样以视频速率(例如每秒几十帧)进行“快照”式拍摄。同时,数据处理必须在资源有限的嵌入式平台上实时完成,这堵死了许多复杂但耗时的重建算法(如CASSI技术)的上车之路。
数据挑战:如何从受噪声污染、光照不均的原始数据中,稳定地提取出有区分度的光谱特征?尤其是在户外,你没法随时掏出一块标准白板来校准颜色。
这篇论文没有空谈理论,而是围绕一个名为HSI-Drive的真实驾驶高光谱数据集展开。该数据集使用了一款基于Imec 25波段红-近红外传感器(采用芯片级窄带滤波片阵列技术)的相机采集。选择它,正是基于上述挑战的权衡:成本相对低、速度快、且技术具有大规模生产的潜力。
HSI-Drive v2.1:更优数据铸就更好模型
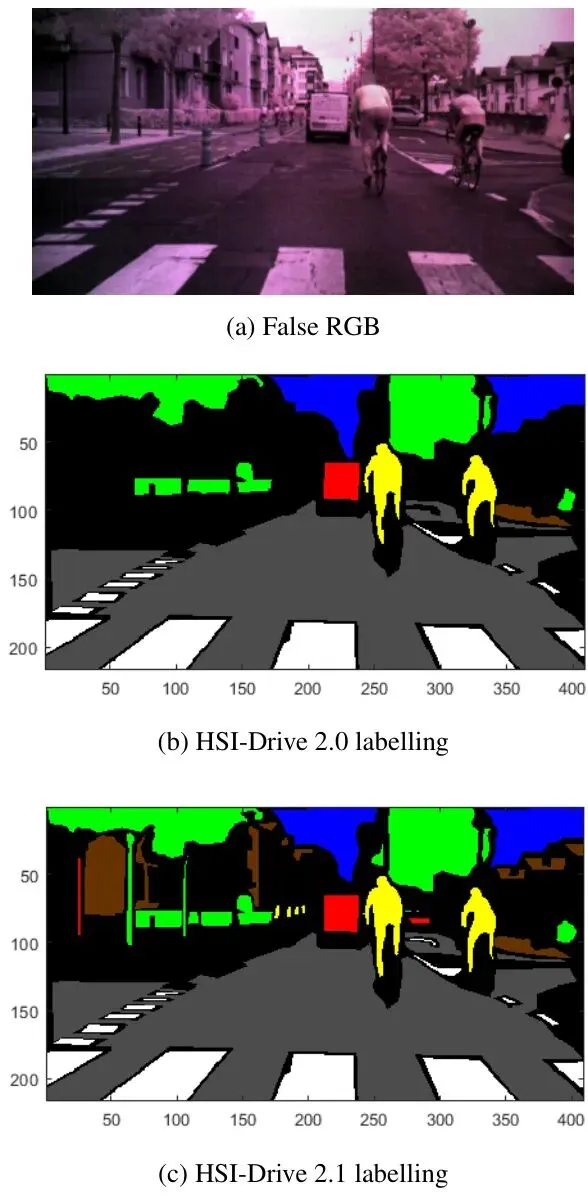
AI圈有句老话:垃圾进,垃圾出。要想模型表现好,高质量的数据是基石。HSI-Drive数据集升级到v2.1版本,主要做了两件大事:精细化标注和智能化的反射率校正。图1:HSI-Drive v2.0和v2.1版本中手动标注的真实地面图像示例
精细化标注并不是增加新图片,而是对v2.0已有的图片进行更仔细的“复查”。目标有两个:一是给那些样本稀少的类别(比如行人、玻璃)增加标注像素;二是提供更干净、准确的测试集,让模型评估更可靠。论文坚持了一个务实的原则:对于人眼都无法明确判断类别的像素(如物体边缘、复杂背景),就保持“未标注”状态。这看似“偷懒”,实则避免了引入噪声标签,对模型训练更友好。
而反射率校正则是数据预处理中的关键一步。简单理解,就是为了消除环境光照(比如正午阳光和黄昏光线)对物体真实颜色的影响,从而让同一种材料在不同光照下看起来更一致。在实验室里这很简单,拿一块已知反射率的白板拍张照作为基准就行。但在变化莫测的户外,这几乎不可能。
之前v2.0版本用一个固定的“晴天正午白板”数据做校正,效果有限。v2.1版本引入了一个巧妙的算法:自动在每张图像中寻找“最亮且最可能是白色物体”的像素,比如道路标线或白色车体。然后,用这个像素的亮度去动态调整校正基准。
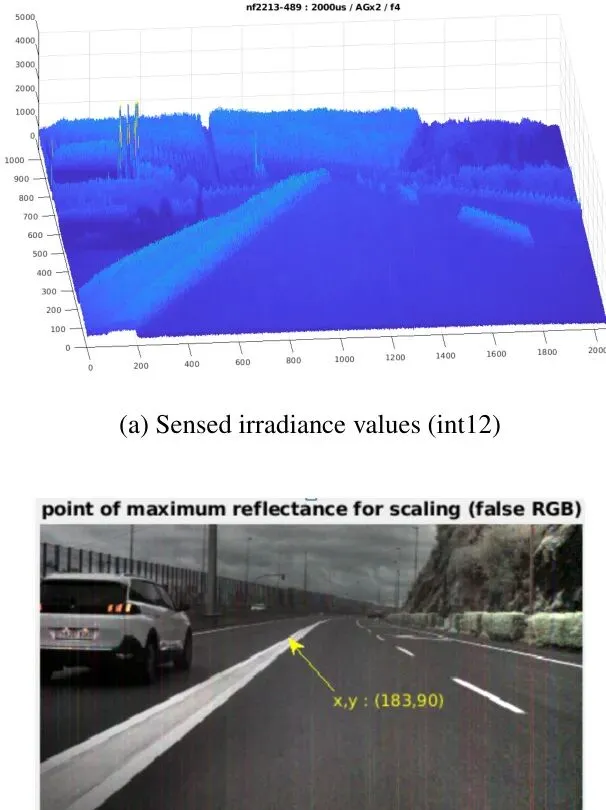
难点在于,车灯、交通信号灯等人造光源在图像中往往更亮,但它们的光谱特征与自然光照下的白色物体完全不同。算法必须能聪明地排除这些“干扰项”。图3:用于白平衡缩放的最大反照率像素识别示例。此图像对应于一个光线昏暗的多云秋晨记录。尽管最大辐照度值由汽车的后灯和前灯产生(a),但算法成功拒绝了这些像素,并选择了一个对应于道路标记的像素作为图像中反射率最高的像素(b)
如上图所示,在一个昏暗的早晨,图像中最亮的像素其实是汽车的前后灯(图a)。但算法通过分析光谱特征,成功识别出这些是“人造光”异常值,并最终选择了道路标记上的一个像素作为基准(图b)。这个算法是全自动的,无需人工干预,因此可以轻松嵌入到实时处理流水线中,实用性拉满。注意力机制:让模型“聚焦”关键光谱
有了更好的数据,还需要更聪明的模型来利用它。高光谱数据立方体包含了几十个波段,但并非所有波段对于区分某个特定物体(比如区分柏油马路和水泥路)都同等重要。这就像在人群中找人,你不会平均地看每个人的所有特征,而会先聚焦于身高、发型或衣服颜色等关键线索。
为了让模型学会这种“聚焦”能力,本文在原本用于图像分割的U-Net模型中,引入了注意力模块。作者团队尝试了CBAM、SE、ECA、CA等多种流行的注意力机制。
最终,他们选择了ECA-Net。ECA是“Efficient Channel Attention”(高效通道注意力)的缩写。它的核心思想是:在不进行通道维度压缩(避免信息损失)的情况下,通过一个快速的一维卷积,让模型学习每个通道(在高光谱中,可以粗略理解为每个波段)的重要性权重。重要的通道特征会被加强,不重要的则被抑制。
选择ECA的原因很务实:首先,它在实验中取得了最好的分割精度;其次,它的计算复杂度和内存开销最小——这对于追求实时性的车载嵌入式平台至关重要。作者将ECA注意力块巧妙地插入U-Net的编码器和解码器的每个阶段,使模型能够在不同深度层次上动态调整对光谱和空间特征的关注。
实验结果:精度显著提升,挑战犹存
改进的数据加上改进的模型,效果究竟如何?论文通过一系列对比实验给出了答案。评价指标主要是平均交并比(Mean IoU),这是衡量分割精度的一个常用指标,数值越高越好。
首先,在5分类(道路、道路标记、植被、天空、其他)任务中,比较了引入注意力模块前后的效果(使用v2.0数据及旧版像素归一化处理)。表3:在HSI-Drive 2.0数据集上5分类实验的分割结果 (%)。
从表3可以看到,加入注意力模块的U-Net(Att. U-Net)在加权IoU指标上比原版U-Net提升了超过2个百分点(从87.52%到89.71%),这是一个相当可观的提升。
接下来,在v2.1数据上,验证新的“动态缩放反射率校正”算法的效果。表4:在HSI-Drive 2.1数据集上5分类实验的分割结果 (%)。
表4的结果非常有趣。第一行是未使用新缩放算法,仅用像素归一化(PN)的结果。第二行使用了新缩放算法+PN,加权IoU从87.75%提升到了89.16%。最妙的是第三行:只使用新缩放算法,完全不用像素归一化,结果反而最好,达到了90.03%!
这印证了论文中的一个观点:像素归一化虽然能抵消阴影影响,但也会抹平不同材料之间整体反射率的差异,而这些差异本身是重要的识别线索。新的校正算法在源头改善了数据一致性,从而减少甚至避免了对后续归一化的依赖,提升了信息保真度。
真正的挑战在于那些难分的类别。论文额外进行了两个6分类实验,分别加入了“涂漆金属”和“行人/骑行者”这两个类别。
表5和表6对比了旧版U-Net(在v2.0数据上)与新版注意力U-Net结合新校正算法(在v2.1数据上)的结果。提升是显著的:
“涂漆金属”类别的IoU从58.61%提升至68.83%,提升了超过10个百分点!“行人”类别也从61.94%提升至67.03%。
然而,即使提升了这么多,这两个类别的绝对精度(68.83%和67.03%)仍然远低于“道路”、“天空”等类别(普遍在90%以上)。这赤裸裸地揭示了高光谱感知在自动驾驶中的阿喀琉斯之踵:
1. 高类内差异:同为“涂漆金属”,不同颜色、不同品牌车漆的光谱可能差异巨大。“行人”穿着不同颜色的衣物,光谱更是千差万别。
2. 低类间可区分性:某些颜色的衣物可能与背景植被光谱相似;金属车漆可能与某些建筑材料的反射特性接近。
3. 样本稀缺:从下面的类别频率表可以看到,“涂漆金属”和“行人”的像素占比本身就很低(分别为2.47%和0.51%),模型难以学习到足够多样和鲁棒的特征。表2:HSI Drive v2.1数据集中每个类别的频率。
小结一下:本文提出的方法(改进数据+注意力模型)对自动驾驶场景中高光谱图像分割的精度有明确且显著的提升,尤其是在处理具有挑战性的类别时。但实验结果也清晰地表明,单靠高光谱数据本身,可能还不足以完美解决所有精细分类问题,尤其是在样本不均衡的情况下。
想直观感受分割效果?论文作者提供了基于这些模型的分割视频演示,链接在文末参考文献部分。
未来之路:硬件与算法的共同进化
通读全文,可以感受到作者们一种非常务实的态度。他们不吹嘘高光谱是“终极解决方案”,而是冷静地指出,这项技术要在自动驾驶领域成功落地,必须依靠硬件与算法的携手共进。
在硬件层面,我们需要性能更强、成本更低、更易于集成的快照式高光谱传感器。芯片级滤波技术(如Imec所用)显示出了大规模量产的成本优势,是未来的重要方向。
在算法层面,研究重点应放在开发更强大、更鲁棒且计算高效的模型上,以充分挖掘有限光谱波段内的信息价值。本文使用的ECA注意力模块就是一个很好的例子,在提升性能的同时兼顾了效率。
最终目标,未必是高光谱单枪匹马取代现有的摄像头、激光雷达和毫米波雷达。更现实的路径是证明其作为一种互补性传感器的独特价值——在特定恶劣条件(雾、霾、低光照)下,或者在需要材质判别(如路面状态感知)的任务中,提供其他传感器难以提供的关键信息。
HSI-Drive数据集及其持续迭代,正是为这条务实的研究路径打下坚实基础。
龙迷三问
高光谱成像(HSI)和我们手机上的摄像头有什么区别?手机RGB摄像头只捕捉红、绿、蓝三个宽波段的光,混合成我们看到的各种颜色。高光谱相机则将光线在几十到数百个非常窄的连续波段上进行分解并成像。因此,它获取的每个像素点都有一条详细的“光谱曲线”,能够揭示物体的化学组成、物理状态等更本质的特征,而不仅仅是颜色。
为什么文中的高光谱相机只有25个波段?不是越多越好吗?在自动驾驶场景下,必须在性能、成本、速度和计算负载之间权衡。更多的波段意味着更大的数据量、更高的传感器成本和更复杂的处理需求,不一定带来成比例的性能提升。本文选择的25波段红-近红外传感器,在成本可控的前提下,已能覆盖许多地面物体有区分度的光谱范围,是一个面向工程落地的务实选择。
论文中提到的“IoU”和“加权IoU”是什么意思?IoU(交并比)是衡量图像分割精度的一个常用指标。简单说,就是模型预测正确的区域(与真实区域重叠的部分)面积,除以模型预测区域和真实区域的总面积。数值在0到1之间,越高越好。“加权IoU”则考虑了不同类别的样本数量不均衡,给每个类别的IoU乘以该类别像素出现的频率后再求和,这样能更公平地评估模型整体表现,避免被样本数量多的类别(如“道路”)主导。
如果你还有哪些想要了解的,欢迎在评论区留言或者讨论~龙哥点评
论文创新性分数:★★★☆☆
本文并未提出全新的网络结构或颠覆性的算法,其创新性更多体现在对高光谱自动驾驶感知这一特定领域工程化挑战的系统性梳理,以及在数据预处理(动态反射率校正)和模型轻量化改进(ECA模块集成)上采取的务实且有效的解决方案。实验合理度:★★★★☆
实验设计清晰,采用交叉验证,对比了数据版本(v2.0 vs v2.1)、预处理方法(像素归一化 vs 新反射率校正)、模型结构(基础U-Net vs 注意力U-Net)等多个维度。结果提升明确,且对难例类别的分析到位,令人信服。学术研究价值:★★★★☆
价值不在于“突破”,而在于“铺路”。它为高光谱感知在自动驾驶领域的可行性研究提供了高质量的公开数据集(HSI-Drive)和扎实的基线方法,清晰指出了技术瓶颈(如难分类别问题),对后续研究者有重要的参考和启发价值。稳定性:★★★☆☆
在HSI-Drive数据集定义的场景和类别内,方法表现稳定且有效。但自动驾驶面对的是开放世界,对于未见过的新材料、极端光照或天气,其稳定性仍需在更大规模、更多样化的数据上进行验证。适应性以及泛化能力:★★★☆☆
方法针对特定的25波段传感器和驾驶场景优化。换用不同波段范围或分辨率的传感器,或应用于农业、工业检测等其他高光谱领域,可能需要重新调整数据预处理流程和模型。硬件需求及成本:★★☆☆☆
最大的成本和硬件需求来自于高光谱相机本身,目前仍远高于普通RGB摄像头。尽管算法层面选择了高效的ECA模块,但实时处理高维数据立方体对嵌入式平台的计算和内存依然是不小的挑战。复现难度:★★☆☆☆
HSI-Drive数据集已公开,这是最大的利好。但复现整个系统需要特定的高光谱硬件(或至少是其数据),且论文未提供完整的模型代码和训练细节,复现需要一定的领域知识和工程能力。产品化成熟度:★★☆☆☆
目前仍处于研究和可行性验证阶段。距离真正的车载产品化,还面临传感器成本、可靠性、极端环境鲁棒性、与现有感知系统融合等一系列工程挑战。短期内更可能作为特定场景下的补充传感器。可能的问题:本文作为一篇偏向工程实践的报告非常出色,但若以顶会严格的理论创新标准衡量,则显得创新深度不足。此外,实验部分缺少与纯RGB基线或雷达等多模态融合方法的直接对比,未能更强烈地凸显高光谱的“不可替代性”。[1] 原论文:Koldo Basterretxea, Jon Gutiérrez-Zaballa, and Javier Echanobe. “CHALLENGES IN HYPERSPECTRAL IMAGING FOR AUTONOMOUS DRIVING: THE HSI-DRIVE CASE”. arXiv:2603.25510v1, 2026.[2] HSI-Drive项目主页(含数据集及分割视频演示):https://ipaccess.ehu.eus/HSI-Drive/[3] Qilong Wang et al. “ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks”. In CVPR, 2020. (本文使用的注意力模块)*本文仅代表个人理解及观点,不构成任何论文审核或者项目落地推荐意见,具体以相关组织评审结果为准。欢迎就论文内容交流探讨,理性发言哦~ 想了解更多原文细节的小伙伴,可以点击左下角的"阅读原文",查看更多原论文细节哦!

🚗 自动驾驶的“光谱眼”正在进化,想第一时间追踪这类硬核技术的前沿动态吗?欢迎加入龙哥读论文粉丝群,
扫描下方二维码或者添加龙哥助手微信号加群:kangjinlonghelper。
一定要备注:研究方向+地点+学校/公司+昵称(如 自动驾驶+上海+清华+龙哥),根据格式备注,可更快被通过且邀请进群。






 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
