一、智能汽车如何“看”?
——感知系统的“五官协作”
随着全球科技领域的日新月异与迅猛进步,自动驾驶技术正以一种前所未有的速度,从曾经遥不可及的科幻设想稳步迈向汽车行业的现实应用,成为当下备受瞩目与热议的焦点话题。曾经的你是否幻想过,未来的汽车能够如同拥有高度发达感官的人类一般,精准无误地“洞察”复杂的路况信息,“领悟”并准确执行驾驶指令,甚至能够基于实时数据与环境变化,自主且智能地规划出最优行驶路线?
如今,这一曾经只存在于科幻电影中的梦幻场景,已不再是我们遥不可及的憧憬与向往,而是正以一种日益显著的态势,逐步渗透并融入我们的日常生活之中。自动驾驶汽车,这一曾经被视为未来科技的象征,如今已悄然成为连接现实与梦想的桥梁,引领着汽车行业迈向一个全新的智能化时代。
然而,近期小米SU7汽车在安徽铜陵高速路段发生的事故,却为行业敲响了一记安全警钟——开启NOA辅助驾驶模式的车辆因未识别施工路段障碍物发生碰撞,最终引发火灾导致三人遇难,暴露出感知系统局限与紧急逃生机制缺陷。
那么,这些集高科技与智能化于一身的智能汽车,究竟是如何实现类似人类的“视觉感知”与“思维决策”的呢?它们又是如何在复杂多变的交通环境中,保持高度的警觉与准确的判断,从而确保行驶的安全与高效呢?在这篇文章里,我们将以更加深入且通俗易懂的方式,带您一同走进智能汽车的“感官世界”与“智慧大脑”,揭开其神秘的面纱,探索其背后的奥秘与原理。
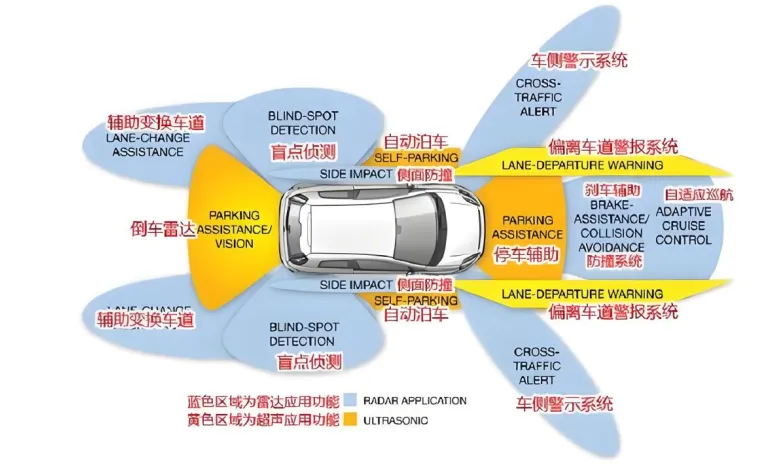
想象一下,当你开车时是如何感知周围环境的?你通过眼睛观察路况,用耳朵聆听周围的声音。智能汽车也有自己的一套“五官”,它们就是各种传感器。
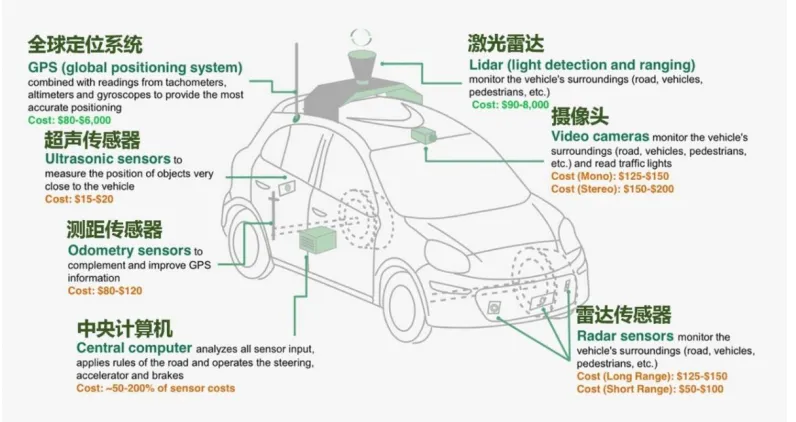
正如下图所示,智能汽车的“看”,依赖于一套复杂的感知系统,它由多种传感器组成,如同人类的“五官”,各司其职又协同工作。
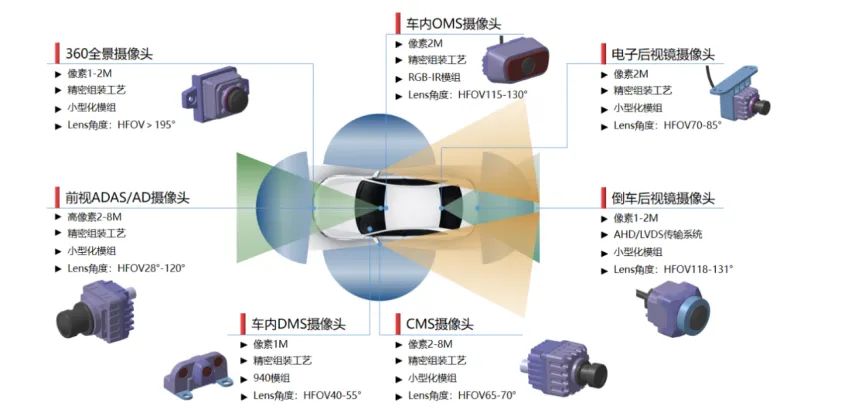
1.摄像头
智能汽车中,摄像头扮演着至关重要的传感器角色,其功能相当于人类的视觉器官——眼睛,负责捕获并处理二维图像信息。借助先进的机器学习与图像识别算法,这些摄像头能够精准地辨识出诸如汽车尾灯、交通信号灯(包括红绿灯)、车道分界线以及行人等多种关键元素,从而在自动驾驶过程中发挥不可或缺的作用。
然而,值得注意的是,摄像头的性能在很大程度上受限于光照条件。具体而言,在遭遇逆光环境、雨雾天气等恶劣自然条件下,摄像头的识别能力往往会受到显著影响,导致其效能大打折扣。
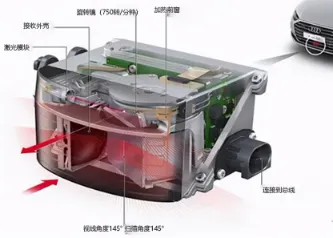
2. 激光雷达(LiDAR)
激光雷达(LiDAR)通过发射激光束并测量反射光的时间来计算距离,能够直接获取3D的点云数据,精度极高。它在自动驾驶中的作用相当于一个高精度的“测距仪”,像一把“光刀”,通过扫描周围环境生成精确的三维地图,帮助车辆精确感知周围障碍物的位置和距离。
相应的,激光雷达的成本也相对较高。另外,其计算依靠射激光脉冲,雨雪天气可能影响性能。
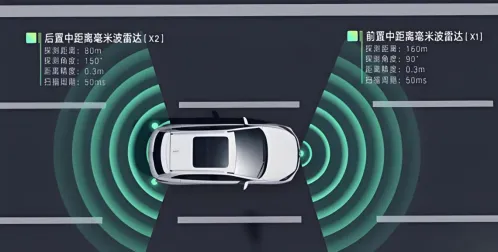
3. 毫米波雷达和超声波传感器
毫米波雷达与超声波传感器,作为智能感知系统的关键组件,能够发射光束或超声波等信号,以此来测量并确定周围环境中物体的具体距离及其空间方位。它们依据发送与接收信号之间的频率差异,进一步分析并识别出物体的运动方向。在这一机制中,毫米波雷达尤为突出,它利用毫米波频段的电磁波作为探测媒介,精准地测定目标物体的距离、速度以及相对角度。毫米波雷达凭借其超长的探测距离、卓越的抗干扰性能以及高稳定性,在复杂环境中展现出显著优势。然而,其局限性在于无法直接识别物体的具体形状和尺寸信息。因此,毫米波雷达更适用于高速移动场景下的车辆间距离测量,确保行车安全。
相比之下,超声波传感器则通过发射并接收超声波脉冲来评估与周围障碍物的距离。尽管其检测范围相对有限,但在低速行驶或近距离操作环境中,超声波传感器表现出了极高的实用性和准确性。特别是在辅助泊车系统中,超声波传感器能够精确识别并避开低矮的障碍物,如路肩或矮墙,从而极大地提升了泊车过程的便捷性和安全性。
毫米波雷达与超声波传感器各自拥有独特的优势和应用场景,它们相辅相成,共同构建了智能汽车全面而高效的感知网络。
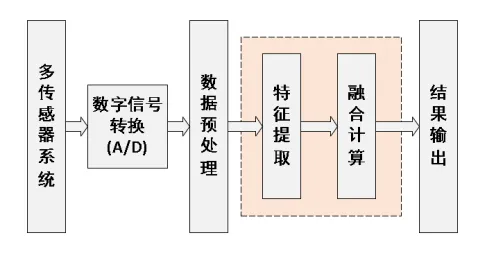
上面介绍的这些传感器各司其职,共同为智能汽车提供全方位的环境感知能力。通过算法将不同传感器的数据整合,就能构建出车辆周围360度的“数字地图”,使智能汽车能够“看见”。例如,摄像头识别到红灯,激光雷达确认停车距离,毫米波雷达监控后方来车,最终确保安全刹停。