在自动驾驶领域,我们常说“仿真做得再好,上路全是坑”。这句话放在四足机器人身上同样成立——从仿真环境里健步如飞的机器狗,到真正能在碎石、斜坡、台阶上稳步行走的实体,中间隔着的不是算法,而是一层厚厚的工程逻辑。
很多开发者能跑通开源的四足机器人RL训练代码,但一旦部署到真实地形,就开始“平地摔”。因此以下这些核心问题,在开源代码里几乎看不到系统讲解:
1. URDF怎么构建?动力学方程怎么列?
2. 关节摩擦、转子惯量怎么辨识?
3. 域随机化怎么设计才有物理依据?
4. Sim-to-Real的Gap到底怎么破?
这些问题不仅决定了四足机器人能否在复杂地形稳定行走,也是Robot Learning教学中长期缺失的一块拼图——恰如自动驾驶中的“仿真到实车迁移”,细节决定成败。
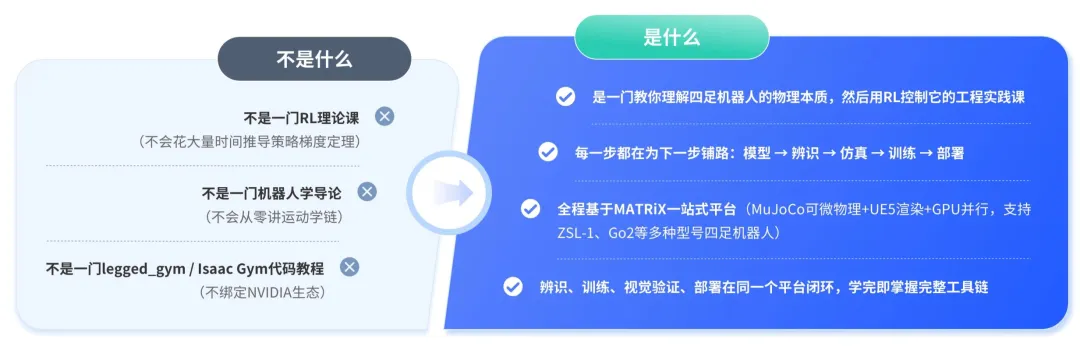
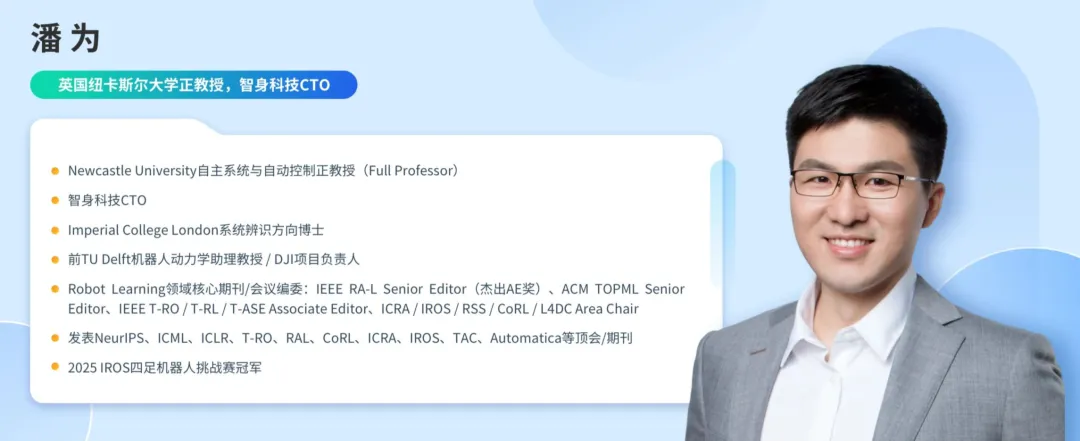
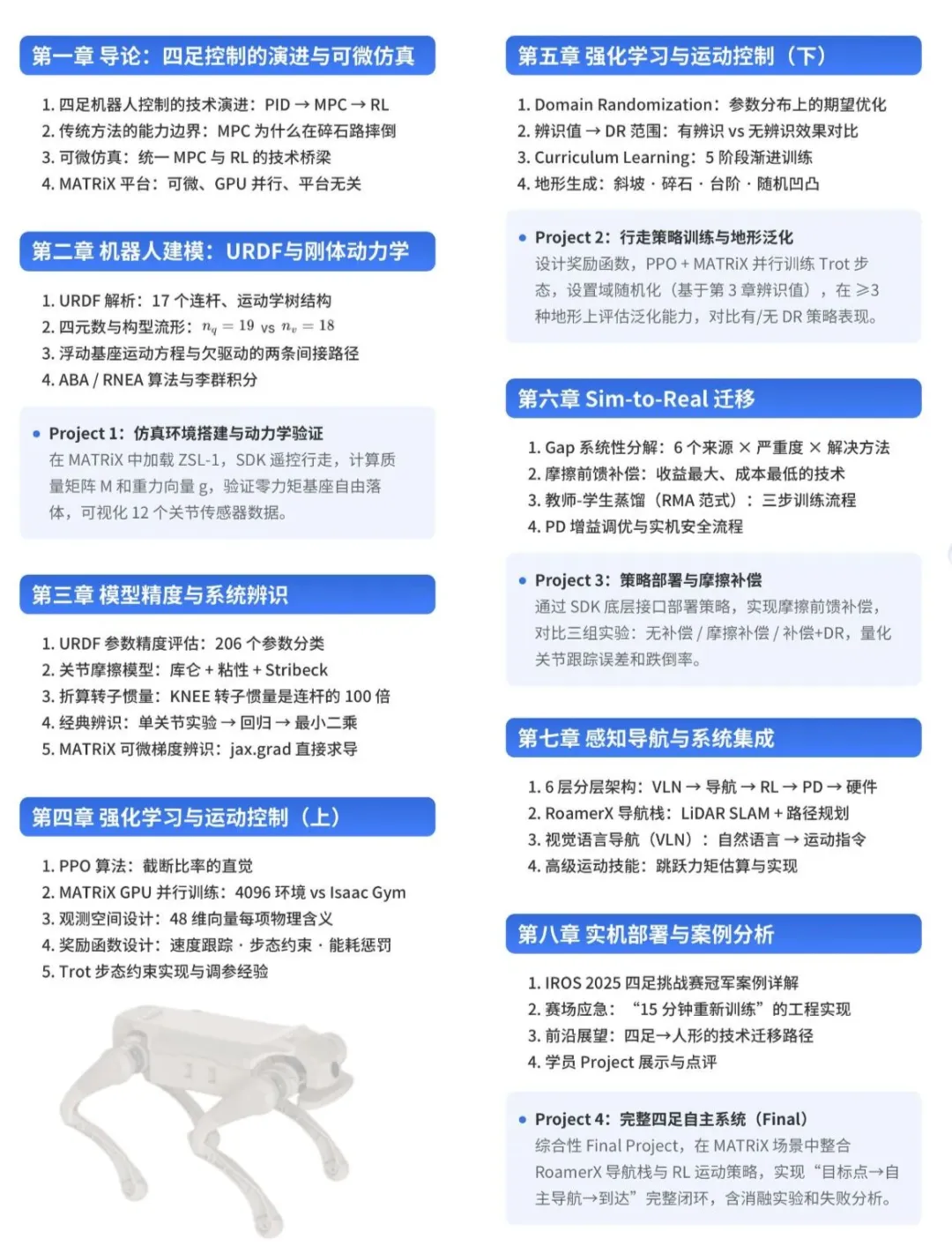
基于此,深蓝学院联合英国纽卡斯尔大学正教授、智身科技CTO潘为打造了《四足机器人:从动力学建模到强化学习》课程,以动力学建模为地基、强化学习部署为终点,依托MATRiX可微仿真平台,完整拆解URDF解析、浮动基座动力学、系统辨识、PPO策略训练、域随机化、摩擦前馈补偿、实机部署全流程,更结合IROS四足挑战赛冠军的实战经验,把从仿真到实机、从平地到越障的完整闭环讲透。以下是项目实践展示:
1. 能读懂任意四足机器人的 URDF,理解其动力学参数的物理含义
2. 能用 MATRiX 可微仿真进行系统辨识(梯度下降拟合物理参数)
3. 能用 MATRiX GPU 并行训练 RL Locomotion 策略(不依赖 Isaac Gym)
4. 能设计奖励函数、调 Domain Randomization 参数
5. 能将策略部署到实机(或高保真仿真),理解并解决 Sim-to-Real 问题
6. 能独立搭建” 辨识 → 训练 → 验证 → 部署” 的完整Pipeline
讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。助教1V1批改作业,并在班会中进行讲评和指导;在班会中,学习更多技巧;在交流中收获更多思路。





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
