Overtake or not - A computer-based driving simulation experiment on drivers' decisions during transitions in automated driving
自动驾驶接管期间“超车还是跟车”?基于计算机驾驶模拟实验的驾驶员决策动态解析
作者:Jasmin Leitner, Linda Miller, Tanja Stoll, Martin Baumann
1.引言
随着自动驾驶技术的普及,人类驾驶员的角色正在发生转变,特别是在由国际自动机工程师学会定义的 SAE 3级(SAE Level 3, SAE 3)有条件自动驾驶环境下,驾驶员被允许参与非驾驶相关任务(Non-Driving Related Tasks, NDRTs),不再需要持续监控驾驶环境,但必须在系统发出接管请求(Take-Over Request, TOR)时随时准备恢复手动控制。这种从自动驾驶到手动驾驶的过渡过程可以定义为驾驶员-自动化系统改变驾驶状态的过程,在这个过程中,驾驶员拥有一段特定的时间预算,即从发出 TOR 到达系统极限之间的可用时间。为了安全恢复控制,人类驾驶员需要经历感知刺激、建立心理模型、做出决策并执行决策等一系列信息处理步骤,但由于参与NDRTs,驾驶员在接管时往往处于“环外”(Out-of-the-loop, OOTL)状态,导致情境意识(Situation Awareness)丧失,从而影响接管表现。以往的研究多集中于完整的接管过程和接管时间(Take-over Time),平均接管时间约为2.72秒,且时间预算越长,接管时间越长。为了解决情境意识缺乏的问题,本研究并未要求驾驶员完全接管车辆并执行操作,而是仅将决策权转移给驾驶员,要求其在传感器被前方慢车阻挡时,决定是否由自动驾驶汽车(Automated Vehicle, AV)在自动模式下执行自动超车操作(Automated Overtaking Maneuver, AOM)。决策过程受多种因素影响,根据经典的决策模型,时间压力会增加任务难度并对决策策略产生负面影响;同时,驾驶情境中的临界度,如与对向来车的碰撞时间(Time-To-Collision, TTC),也对驾驶员的决策具有决定性作用。因此,本研究旨在探讨在分心状态下,时间预算(有时间压力与无时间压力)和情境临界度(TTC低、中、高)如何综合影响驾驶员的 AOM 决策、反应时间、决策确定性以及感知临界度,为未来人机共驾系统的安全设计提供理论依据。
2.研究内容
本研究的核心目的是考察驾驶员在分心状态下,是否能够针对安全敏感的超车任务做出及时且恰当的决策,以及时间预算和情境临界度如何通过交互作用干预这一心理认知过程。研究设定了一个具体的交通冲突场景:AV 在双向双车道乡村公路上行驶,因前方慢车阻挡传感器范围,系统询问驾驶员是否应执行 AOM。
研究包含两个部分:首先是一项基于视频的初步在线预实验(Study 1),旨在确定影响驾驶员超车决策的对向来车 TTC 阈值,以此作为主实验中操纵情境临界度的依据;其次是主实验(Study 2),这是一项在实验室环境下进行的基于计算机的驾驶模拟实验,要求驾驶员在执行视觉-认知 NDRTs 的同时,响应 AV 的超车决策请求。
3.方法
3.1预实验 (初步在线研究)
预实验旨在确定当特定比例(25%、50%、75%)的驾驶员决定超车或不超车时的TTC值,以代表不同的情境临界度。
1.驾驶场景:视频展示了 AV 以 50 km/h 的速度跟随一辆 50 km/h 的蓝色慢车行驶。一辆白色对向来车以 70 km/h 的速度靠近。当达到特定的 TTC 时,AV 会发出决策请求。
2.自变量设置:研究测试了从14秒到24秒(以1秒为增量)的11个TTC条件。完成AV安全超车所需的最短TTC为12秒,为了确保对参与者而言没有绝对正确或错误的决定,最低TTC设置为14秒。
3.人机界面:当请求触发时,屏幕右侧的HMI会显示“超车”和“不超车”两个按钮并伴随提示音。
4.预实验结果:在排除了未注意到对向来车的参与者后,最终样本包含27名具有有效驾照的参与者。结果显示,TTC越低,决定超车的比例越低。最终选取了TTC=16秒(22%选择超车)、TTC=19秒(44%选择超车)和TTC=22秒(67%选择超车)作为主实验中高、中、低临界度的参数设置。
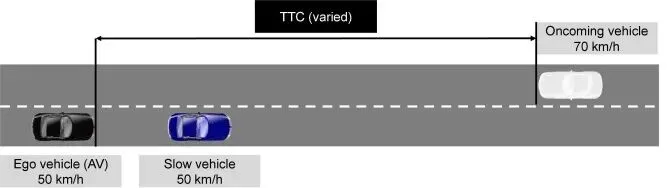
图1 超车场景的示意图

图2 示例视频视图,左侧显示驾驶情况,右侧显示请求时的AOM决策按钮HMI
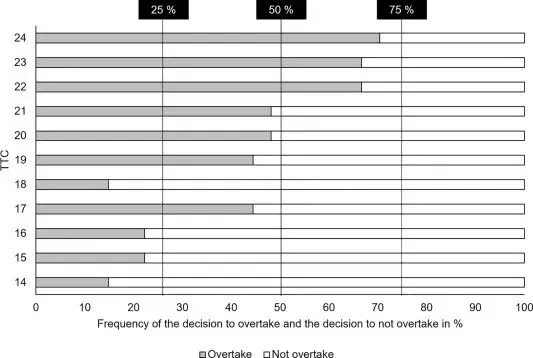
图3 参与者在预实验中根据各个TTC决定超车或不超车的频率分布
3.2主实验设计与设置
主实验采用2(时间预算)×3(情境临界度)的组内重复测量设计。
1.参与者:共招募了37名参与者(73%为女性,平均年龄28.00岁),均持有有效驾照。
2.时间预算:通过指导语进行操纵。“立即”条件下,要求参与者在请求出现时立即反应(高时间压力);“准备好时”条件下,参与者可以在觉得准备好后再从NDRT切换到决策任务(低时间压力)。
3.情境临界度:即预实验确定的TTC=16秒(高临界度)、TTC=19秒(中临界度)和TTC=22秒(低临界度)。
4.非驾驶相关任务 (NDRT):采用了一项视觉-认知任务。在右侧屏幕上随机呈现字母(p, q, P, d),如果出现小写“p”,参与者需按左方向键点击左侧方框中的钩号;如果是其他字母,则按右方向键点击右侧方框中的叉号。
5.实验流程:共有18次模拟驾驶,分为两个区组(对应两种时间预算条件),每个区组包含9次模拟(3种TTC条件各出现3次)。参与者使用键盘上的“Ctrl”键代表超车,“Alt”键代表不超车。每次模拟后,需口头报告决策确定性,并在7点李克特量表上评估感知临界度。
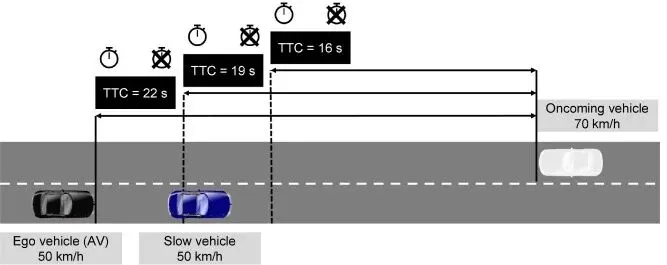
图4 主实验超车场景的示意图
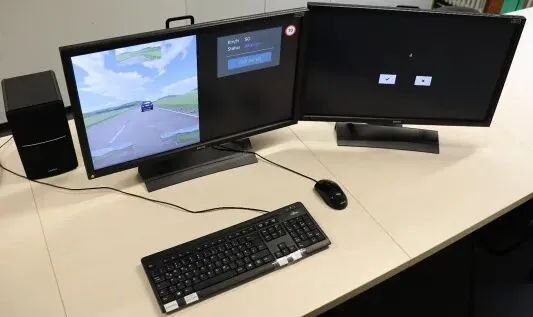
图5 基于计算机的驾驶模拟实验设置,左侧显示驾驶任务和HMI,右侧显示NDRT
3.3数据处理与统计分析
由于18次模拟嵌套在每位参与者内,数据具有分层结构。研究采用了广义线性混合模型(Generalized Linear Mixed Models, GLMMs)中的随机截距模型来进行假设检验。对于二分变量(超车决策),使用带有logit函数的GLMM;对于连续变量(反应时间等),使用带有恒等函数的GLMM。
4.研究结果
4.1超车决策
总体而言,驾驶员决定超车的频率(75%)高于不超车的频率(25%)。GLMM分析显示,时间预算具有显著的主效应(p < 0.001),情境临界度也具有显著的主效应(p = 0.028)。
1.与“立即”条件相比,在“准备好时(无时间压力)”条件下,驾驶员更多地做出了“不超车”的保守决策。
2.随着TTC的增加(情境临界度降低),决定超车的频率显著升高。在最关键的临界度(TTC=16秒)下,如果在无时间压力条件下,只有48%的驾驶员选择超车。
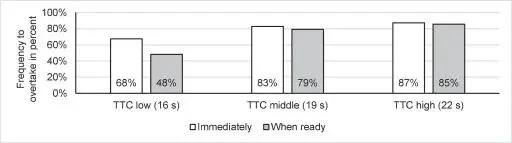
图6 取决于时间预算条件和临界度条件的决定超车频率
4.2反应时间
反应时间是指从AV发出请求到驾驶员按下按键的时间。驾驶员的平均反应时间为2.23秒。GLMM分析揭示了时间预算(p < 0.001)和情境临界度(p < 0.001)的显著主效应,以及两者的显著交互作用(p = 0.001)。
1.在“准备好时”条件下(平均2.45秒),反应时间显著长于“立即”条件下(平均2.01秒)。
2.与预期相反,在最危急的情境(TTC=16秒)下,反应时间(2.33秒)反而最长,高于TTC=19秒(2.19秒)和TTC=22秒(2.17秒)的条件。
3.进一步的探索性分析表明,决定“不超车”的反应时间在所有条件下均显著长于决定“超车”的反应时间(p <0 .001)。
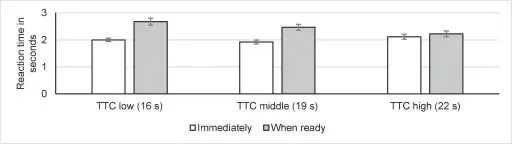
图7 取决于时间预算条件和临界度条件的决策平均反应时间(秒)
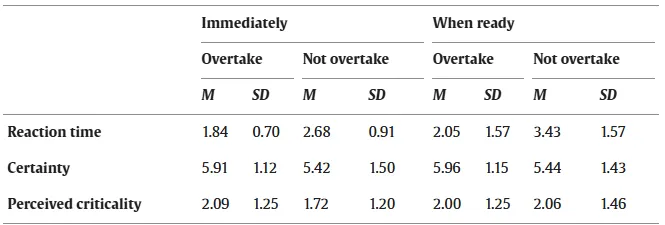
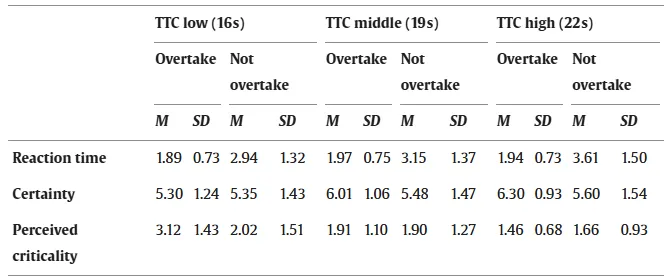
表1 反应时间、决策确定性和感知临界度的平均值
4.3决策确定性与感知临界度
决策确定性:时间预算对决策确定性没有显著影响(p = 0.909)。但情境临界度主效应显著(p < 0.001),情境越危急(TTC=16秒),驾驶员对其决策的确定性越低。此外,决定超车时的确定性显著高于决定不超车时,但在最高临界度(TTC=16秒)下出现了反转,驾驶员此时决定超车的确定性略低于决定不超车。
感知临界度:客观的TTC临界度准确反映在了主观感知上(p < 0.001),即TTC越短,感知临界度评分越高。然而,时间预算同样未对感知临界度产生显著影响(p = 0.968)。
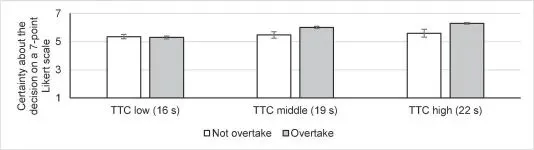
图8 取决于临界度条件和超车决策的7点量表平均决策确定性
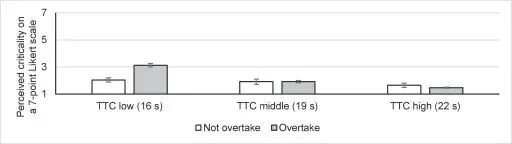
图9 取决于临界度条件和超车决策的7点量表平均感知临界度
表2 反应时间、决策确定性和感知临界度的平均值
5.结论
本研究通过精密的计算机驱动模拟实验深入解构了自动驾驶过渡期内驾驶员在 NDRT 干扰下的超车决策逻辑,结果证实时间压力和情境临界度是决定决策安全性的核心变量,驾驶员在面临时间压力时往往表现出更强的超车倾向和更快的反应速度,而在无压力环境下则更倾向于执行保守的“不超车”策略,并投入更多时间用于感知和处理复杂的交通情境。一个具有价值的发现是,在高度危急的情境中,驾驶员决策的反应时间反而延长且确定性最低,这意味着在风险博弈的边缘,驾驶员往往需要更长的评估时间甚至可能因错过最佳决策窗口而被迫妥协,这对系统的实时交互效率提出了极大挑战。此外,实验数据明确强调,即使仅是进行超车决策而无需物理操纵,驾驶员的平均耗时也超过了 2 秒,这意味着在设计 SAE 3 级车辆的 TOR 时间预算时,必须充分考虑到大脑认知重建所需的这部分基础耗时,不能仅仅依据物理动作的快慢来划定安全边界。最终,本研究证明了将特定决策权移交驾驶员而非强行恢复完全手动驾驶,是克服 OOTL 效应并有效分配接管时间预算的一种极具潜力的系统交互替代方案,为未来高等级自动驾驶的人机协作模式设计提供了重要的实证支撑。
6.文献出处
Leitner, J., Miller, L., Stoll, T., & Baumann, M. (2023). Overtake or not - A computer-based driving simulation experiment on drivers' decisions during transitions in automated driving. Transportation Research Part F: Psychology and Behaviour, 96, 285-300.
7.点评
这是一篇探讨 L3 级自动驾驶人机交互边界的标杆级实证研究,其核心在于将沉重的“全过程控制接管”解耦为轻量化的“战术层决策移交”,从而精准剥离出驾驶员在接管瞬间纯粹的认知加工耗时。文章通过心理物理学方法严谨标定了 TTC 风险阈值,并用硬核数据揭示了一个现象:时间上的压力竟然会显著诱发冒险超车倾向,这种“不让想就超,想清楚了才让”的心理惯性(反应在不超车决策耗时显著更长上)为未来 HMI 的设计敲响了警钟——系统绝不能通过倒计时或急促音催促驾驶员,因为催促本身就是在诱导不安全的博弈行为。尽管该研究受限于模拟器环境无法100%还原真实碰撞带来的心理压迫感,其得出的“2 秒认知重建基准耗时”对全球自动驾驶安全标准的制定具有极其直接的参考价值,尤其是对如何通过周期性的“主动决策参与”来维持驾驶员的情境意识,提供了一种比“被动注意力监测”更为先进的系统集成思路。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 朱帮乐
审核丨 李珺
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!


