Tesla Optimus 真正最难的其实不是“腿”,而是手。因为人类工业文明本质上就是建立在“手”之上的文明。从石器、螺丝刀、键盘、手机、到芯片制造,本质都是人手能力的延伸。Optimus 手部的科技含量其实远超很多人的想象。
核心主要在 5 个层面:
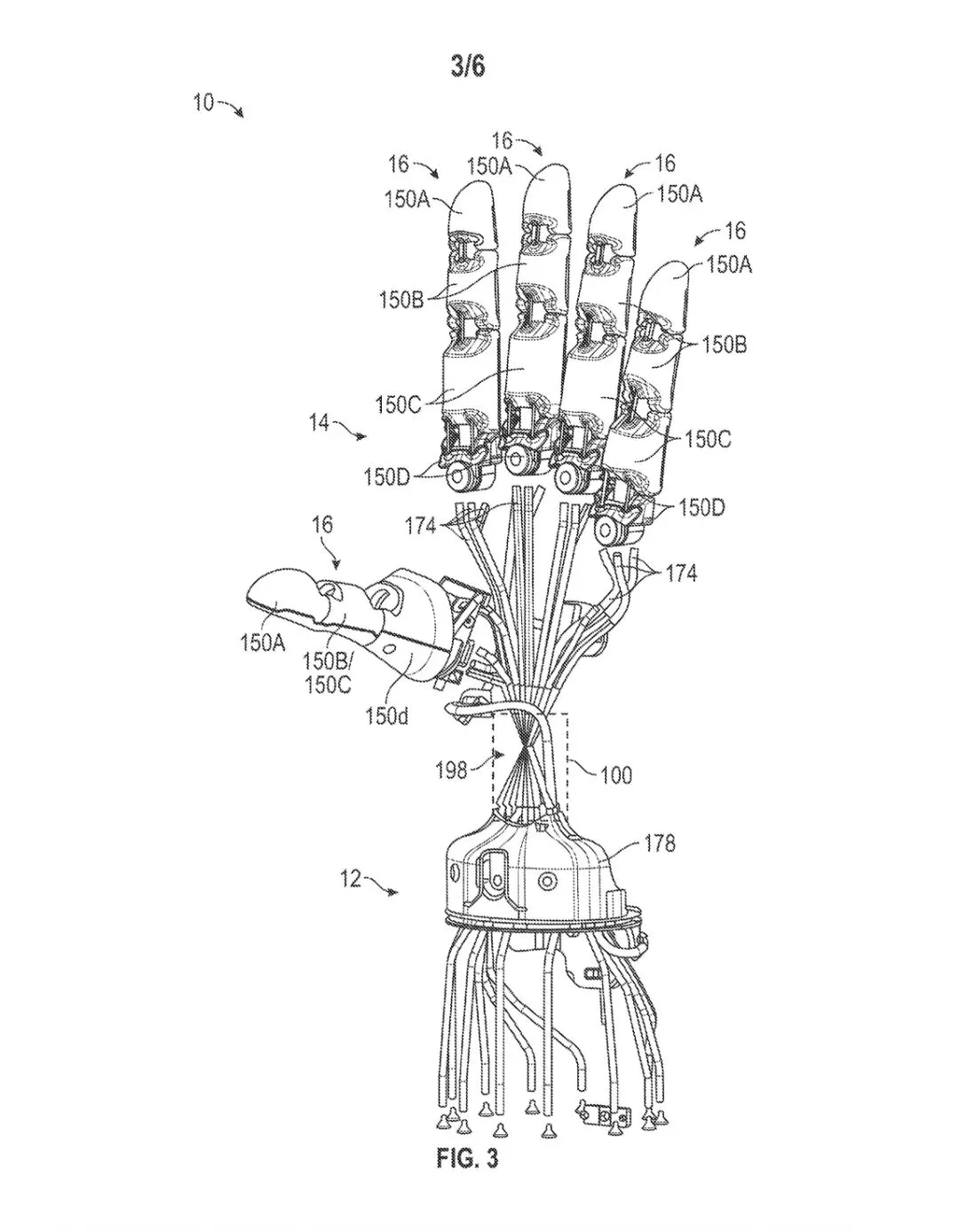
- 超高自由度机械系统
人手极其复杂。一只手27块骨头、30多块肌肉、上百条韧带,而机器人需要尽量模拟这种能力。
Optimus 的方向已经接近人类手部自由度,每根手指独立运动,多角度抓取,不同力度控制,复杂协同动作。
背后涉及:
精密减速器
微型电机
腱绳系统
力矩控制
本质上已经接近“微型工业机器人”。
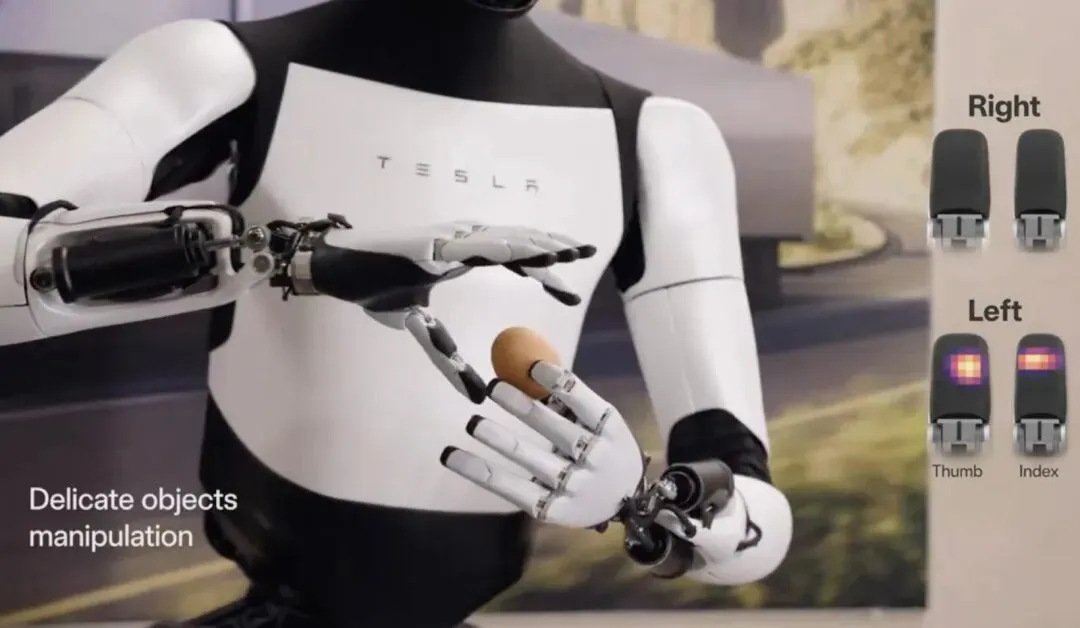
- 力反馈(真正核心)
真正难的不是“抓”,而是“别抓碎。”比如鸡蛋
、玻璃杯、纸杯、螺丝,每一种物体力度都完全不同。
机器人必须实时感知压力、摩擦、位移、滑动趋势。这其实就是“机器触觉系统”。未来高端机器人一定越来越像“拥有触觉的机器生命体”。
- AI视觉 + 大模型控制
Optimus 的手并不是传统预设动作,而是AI 实时决策。
比如:
杯子在哪里
从哪个角度抓
抓多大力度
下一步怎么放
背后已经不是传统机械控制,而是视觉 AI、空间感知、动作预测、端到端神经网络。本质上接近:自动驾驶系统 + 工业机器人的融合。
- 极限工程微型化
Tesla 想把这一切做到低成本量产。难度极高。因为一只手里要塞入:
电机
传感器
线路
减速机构
散热系统
控制器
同时还必须做到:
轻
耐用
低功耗
可维护
低成本
这已经接近:
三者融合。
- 背后真正的意义
很多人以为人形机器人核心是“走路”。其实不是,真正改变世界的是“替代人手劳动。”因为全球绝大部分工作,最终都离不开手。所以一旦机器手成熟:
制造业
物流
餐饮
护理
家庭服务
危险作业
都会被重构。这也是为什么全球顶级科技公司现在都在疯狂投入机器人手。谁先解决“机器手”,谁就可能拿到下一代工业革命的入口。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
