Safety effects of take-over requests on vehicle conflicts in realistic mixed traffic simulation
自动驾驶接管请求对混合交通冲突的安全影响:基于真实路网仿真的空间非线性建模分析
作者:Marios Sekadakis, Maria G. Oikonomou, George Yannis
1.引言
随着高级驾驶辅助系统(ADAS)与自动驾驶(AD)技术的快速商业化,自动驾驶车辆与人类驾驶车辆(HDVs)共存的混合交通环境带来了新的安全挑战。尤其在接管请求(TOR)触发后,驾驶员需在有限时间内重新感知交通环境并恢复控制,容易引发驾驶不稳定和潜在碰撞风险。现有研究多关注接管时间(TOT)、个体驾驶行为或自动化市场渗透率(MPR)对交通流效率的影响,但对接管事件在路网层面的安全影响及其空间传播机制研究不足,也缺乏对时间预算(TB)、道路几何条件与替代安全指标时空分布关系的系统量化。为此,本研究结合真实数据校准的高速公路微观仿真、接管行为控制接口、替代安全评估模型(SSAM)和空间广义相加模型(GAM),量化接管事件对碰撞时间(TTC)等车辆交互安全指标的影响,揭示混合交通中控制权转换风险的传播规律,并为自适应人机交互(HMI)设计和高速公路安全规划提供理论依据。
2.研究内容
本研究旨在定量评估混合交通流中由接管请求(TOR)引发的驾驶行为扰动,及其对路网级代理安全结果的影响。研究以希腊中部 Nea Odos 高速公路约 50 公里双向四车道走廊为对象,利用 Aimsun Next 构建高保真微观仿真路网,并基于真实交通流量与速度数据进行标定。为模拟控制权动态过渡过程,研究通过定制化 Python API,根据接管后驾驶行为特征,将驾驶员划分为消极、紧张和正常三类,并动态调整车辆微观运动参数。随后,针对国际汽车工程师学会(SAE)2级和3级自动驾驶车辆,在车道封闭与运行设计域退出(ODD 退出)两类接管场景下开展大规模仿真,提取碰撞时间(TTC)等冲突指标,并利用包含空间平滑项的多元广义相加模型(GAM),分析自动化市场渗透率(MPR)、时间预算(TB)、场景条件和车辆类型对路网交互安全性的非线性及空间异质性影响。
3.方法
3.1真实路网标定与仿真环境搭建
仿真底层依托希腊 Nea Odos 走廊,该路段限速 120 km/h,包含多个出入口匝道与交织区。仿真流量输入源自高速公路运营商在2021年10月采集的真实监测数据,峰值小时双向车流量超过1700辆。通过 Geoffrey E. Havers (GEH) 统计量进行检验,91.7%的链路 GEH 小于5,确保了模拟流量与真实世界的高度一致性。

图1 雅典至塞萨洛尼基之间的 Nea Odos 高速公路真实路段
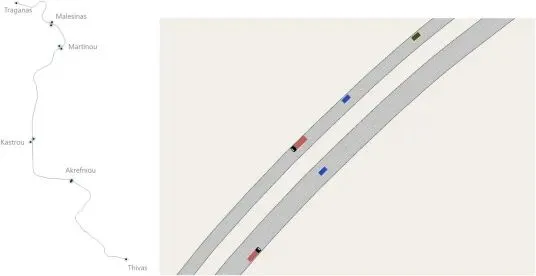
图2 模拟Aimsun Next网络
3.2API 驱动的接管事件动态模拟
研究开发了 Python API 来实时改变处于 TOR 阶段车辆的纵向控制参数(如减速度、跟车间距、反应时间)。整个过渡被分为:自动驾驶阶段 、收到 TOR、控制权转移(TOT阶段)、纯手动驾驶阶段、恢复自动驾驶。
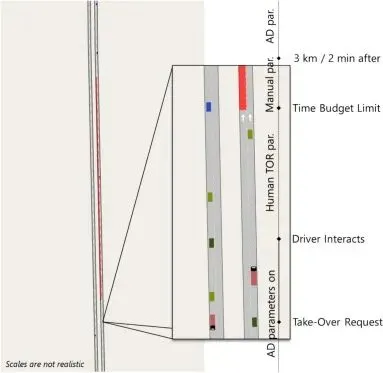
图3参数在接管请求(TOR)事件期间激活和恢复的时间序列
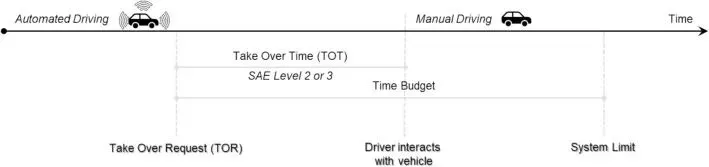
图4 从自动驾驶到手动驾驶的接管过程
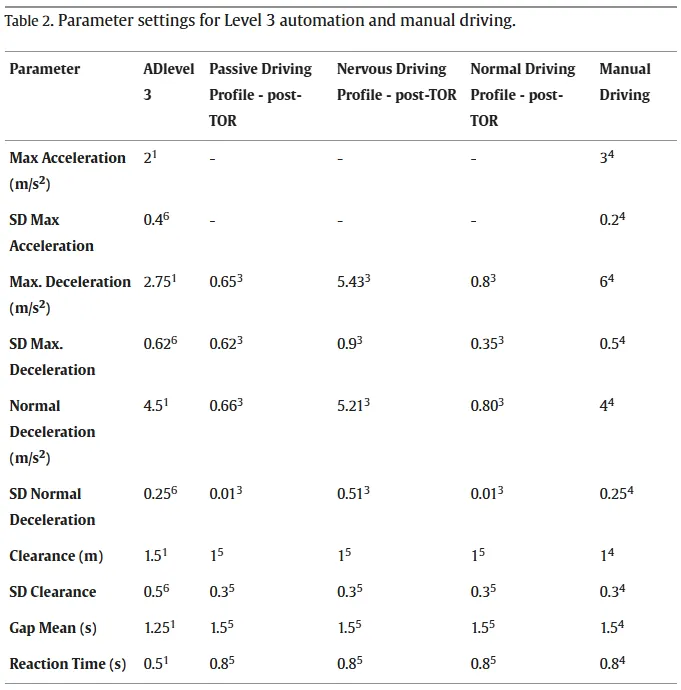
3.3车辆参数化与后接管行为重构
为了真实模拟人类在解除自动驾驶后的不可预测性,车辆的参数并非确定性赋值,而是基于高斯采样分布分配了三种基于先期高频模拟器实验推导出的驾驶员画像:消极且响应慢、紧张且中等响应、正常且响应快。
表1 L2级自动驾驶与手动驾驶的参数设置表
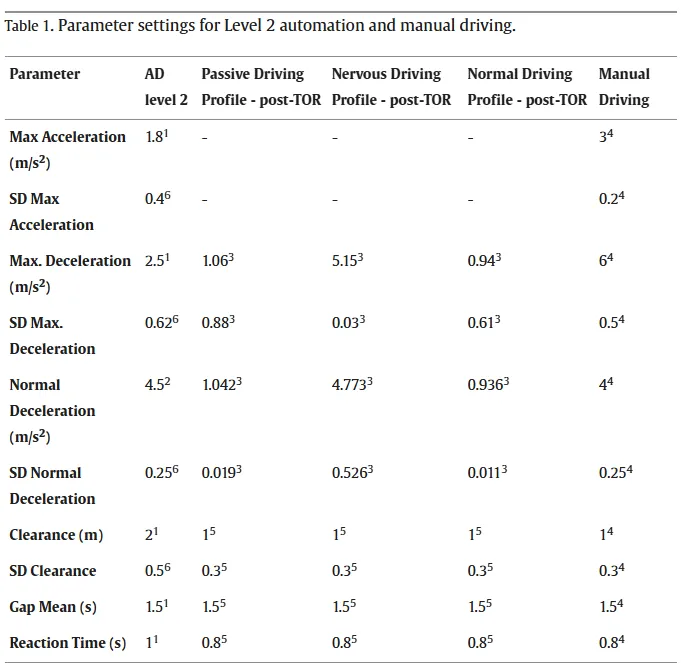
表2 L3级自动驾驶与手动驾驶的参数设置表
3.4混合交通场景设计
实验采用了全因子设计,生成了涵盖不同MPR、不同接管场景以及不同时间预算的18种交通配置组合。
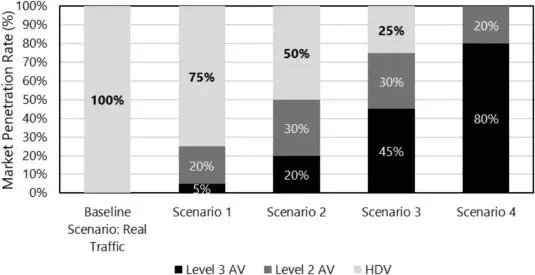
图5 不同市场渗透率的交通混合场景
3.5冲突提取与统计建模
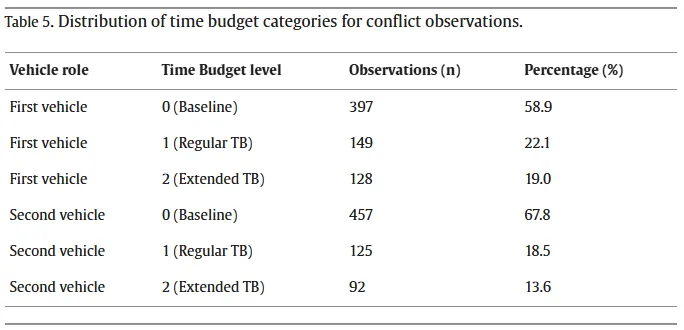
使用SSAM工具扫描所有轨迹文件,提取发生冲突的瞬时安全指标。提取的674次有效冲突作为因变量输入至空间GAM中。GAM结合了线性固定效应(如车速限制、MPR、TB)与非参数平滑函数。
表3 冲突观测的时间预算类别分布表
4.研究结果
4.1空间GAM模型的全局适配度与非线性诊断
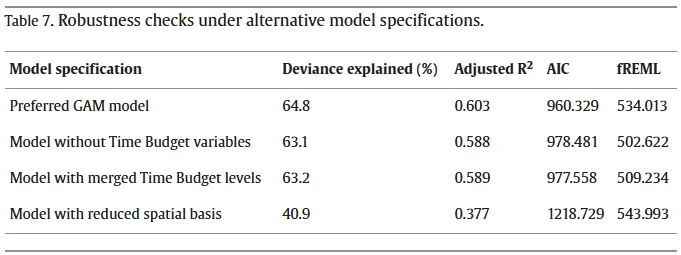
模型对数据的拟合度极高,解释了64.8%的偏差。敏感性与稳健性检验证实,纳入时间预算变量使Akaike信息准则大幅降低,而去除空间坐标平滑项会导致模型性能断崖式下跌,这充分说明了空间异质性在道路冲突评估中的决定性作用。
表4 拟合GAM模型的平滑项诊断表
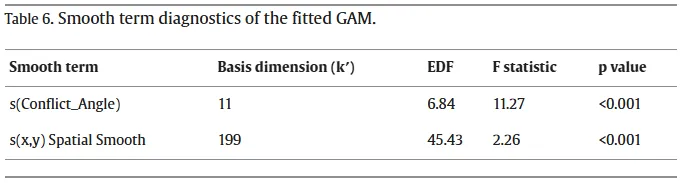
表5 替代模型规范下的稳健性检验表
4.2参数效应:MPR的安全红利与TOR的风险骤增
固定效应参数揭示了极其关键的安全博弈特征:
MPR与限速的正面效应:自动驾驶比例的上升以及路段限速的提高均与更长的TTC正相关。这表明在几何线形良好的高速公路上,自动驾驶车辆的增多确实能促成更稳定平滑的交通流。
接管时间的致命压缩:当作为冲突事件的第一辆车处于接管状态时,其时间预算变量输出了极大且极度显著的负向乘数效应。“常规TB”与“延长TB”的系数几乎完全相同,这意味着只要接管事件发生,短期的碰撞危险就会因为控制权交接的紧急性而骤增,预警时间的延长并不能抹平这种底层的物理与认知失稳。
4.3空间与几何的平滑非线性效应
GAM的非参数组件揭示了复杂的交互细节:
冲突角度:冲突角度较小时,TTC更短,反映了同向行驶中的极度危险性。
空间热点地图:二维空间平滑曲面在路网中勾勒出了明显的低TTC“高危盲区”。这些红区不仅精准覆盖了预设的TOR触发段,更蔓延至下游的匝道汇入区,证实了接管失稳会通过车流交互向周边产生强烈的空间级联辐射。
表6 GAM平滑项统计表
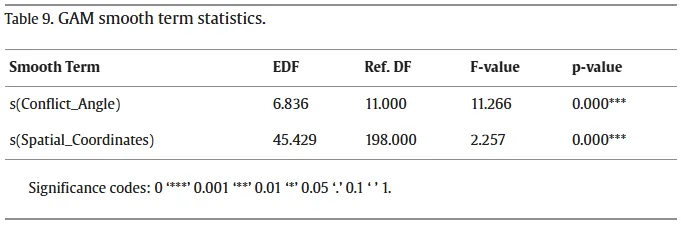
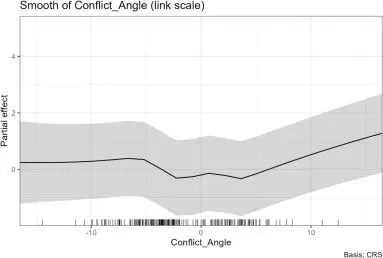
图6车辆间交互角度对对数化 TTC 的非线性效应图
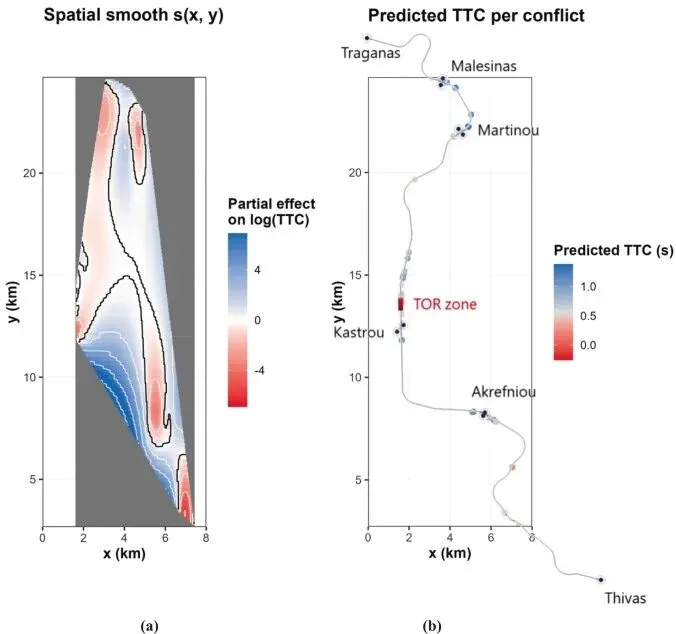
图7模拟走廊上对数化TTC偏效应的空间平滑表面及沿线的预测TTC分布图
4.4交互边缘效应与场景横向对比
边际预测图直观显示,随着MPR从0%爬升至100%,处于纯人类驾驶基线状态下的车辆其TTC获得了近50%的相对提升;但在经历接管的车辆身上,这种随MPR上升的安全红利被彻底拉平。在场景对比中,基线场景的TTC显著高于“车道封闭”与“ODD退出”场景,进一步确认了空间干预与功能干预对驾驶员工作负荷与安全裕度的同等残酷挤压。
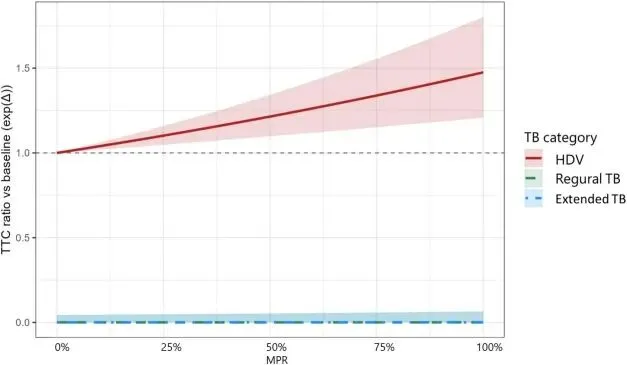
图8第一辆车在不同TB水平下MPR对预测对数化TTC的条件边际效应图
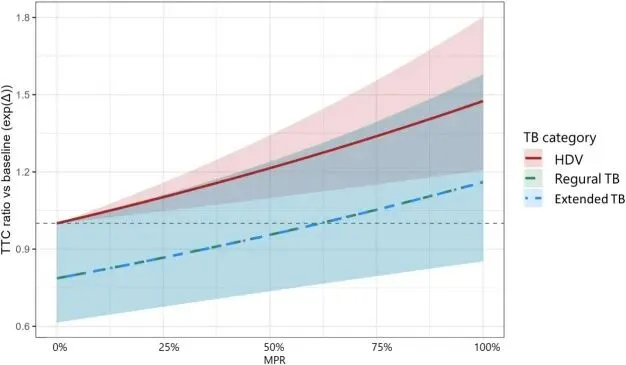
图9 第二辆车在不同TB水平下MPR对预测对数化TTC的条件边际效应图
5.结论
本研究构建了融合高保真微观交通仿真、定制化API接管事件驱动与空间半参数建模的可复现分析框架,量化了真实高速公路走廊中的追尾与冲突风险。结果表明,API动态调整的驾驶行为参数能够有效模拟SAE2/3级自动驾驶车辆在控制权过渡期的微观冲突特征,并与实际接管工作负荷相一致。研究进一步揭示,自动化市场渗透率与时间预算是影响时间安全裕度的重要因素:尽管较高的自动化车辆比例整体上有助于平滑交通流并提高平均碰撞时间,但处于接管过程中的车辆仍会因瞬态控制失稳而显著压缩TTC安全冗余,且这一风险并不完全取决于时间预算长短。这说明接管事件本身可能削弱高MPR带来的系统级安全收益。与此同时,空间广义相加模型识别出TOR区域和车道汇合区等局部低TTC高风险位置,揭示了接管扰动在多车交互中向下游交通流传播的空间级联机制。该研究突破了传统全路段平均安全评估的局限,可为高风险路段的动态限速、汇入控制和自适应基础设施安全提示提供科学依据。
6.文献出处
Sekadakis, M., Oikonomou, M. G., & Yannis, G. (2026). Safety effects of take-over request sonvehicle conflicts in realistic mixed traffic simulation.Accident Analysis and Prevention,232,108520.
7.点评
这是一篇位于交通安全工程与智能网联汽车交叉领域的高水平研究,其重要贡献在于突破了传统自动驾驶接管研究长期聚焦于单一驾驶员认知负荷测试或孤立单车轨迹分析的局限,转而从系统工程视角出发,将驾驶员接管瞬间的微观行为波动,如减速度变化、反应迟滞及消极/紧张驾驶画像,嵌入真实高速公路走廊的宏观混合交通流中进行分析。研究通过定制化Python API对Aimsun Next微观仿真平台进行二次开发,实现了对不同SAE等级车辆在运行设计域退出或车道封闭场景下瞬态运动参数的动态调整,并结合替代安全评估模型与空间广义相加模型,构建了“微观仿真—冲突提取—空间统计建模”的完整分析链条。该方法不仅揭示了接管失稳如何通过多车交互向下游及相邻车道传播,也指出延长时间预算并不能完全消除接管动作本身带来的短期安全风险。尽管研究仍受到微观仿真对人类认知恢复过程简化、碰撞时间阈值设定可能影响冲突识别结果等限制,但其将随机驾驶行为、道路空间拓扑与非线性安全评价相结合的研究框架,为未来软件定义汽车时代下车路协同基础设施规划、动态限速控制以及自适应人机交互预警设计提供了具有启发意义的量化分析范式。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 蒋宇
审核丨 李珺
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
