自动泊车的自动驾驶控制算法
- 2026-06-08 19:24:38
点击上方蓝字谈思实验室
获取更多汽车网络安全资讯

01
自动泊车系统
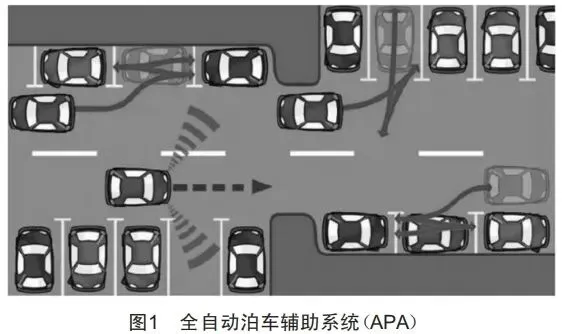
自动泊车系统(Automated Parking Assist,APA)通过车载传感器感知车辆周围环境,扫描可满足当前车辆停放需求的障碍物空间车位或地面标线车位。系统通过人机交互界面(Human Machine Interface,HMI)获取驾驶员对目标车位的选择,或自动确定目标车位,随后规划泊车路径,并通过控制器向车辆执行机构发送横向与纵向运动控制指令,最终实现车辆安全、准确、高效地泊入目标车位,如图1所示。
为实现上述功能,APA系统通常分为车位扫描、路径规划和决策控制三个模块,各模块功能如下:
(1)车位扫描模块
利用车辆搭载的传感器识别和扫描由障碍物边界(如车辆、路沿)形成的车位以及带有车位线标记的车位,输出车位地图信息与车辆定位信息。同时,根据车位类型将其划分为平行车位、垂直车位和倾斜车位三种。
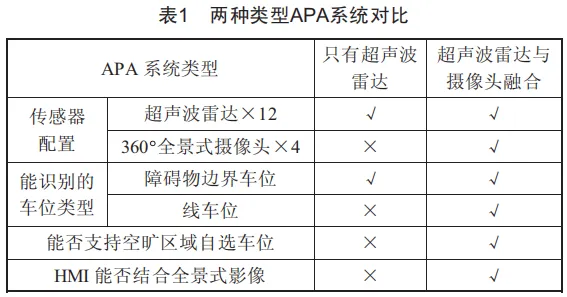
目前主流APA系统主要依靠超声波雷达和摄像头传感器完成车位扫描,两类系统的对比如表1所示。由表1可知,超声波雷达只能测量障碍物边界距离,无法识别车位线;而360°全景摄像头弥补了识别线车位的不足,通过图像分析处理还可提供更丰富的障碍物信息。因此,在超声波雷达与摄像头融合的APA系统中,线车位的识别率显著提高,即车位检出率提升。此外,将360°全景影像系统(Around View Monitor,AVM)与APA在人机交互方面融合设计,可在泊车过程中为用户提供全景视角,用户能直接在全景影像界面上选择目标车位(如空旷区域自选车位、系统扫描出的多个可泊车位等),提升了用户体验与参与感。
(2)路径规划模块
根据车位扫描模块输出的地图信息,结合车辆运动学模型,规划车辆泊入目标车位的路径。
(3)决策控制模块
依据车位扫描模块提供的地图信息和路径规划模块输出的路径信息,对车辆进行运动控制,使其按规划轨迹行驶,实现安全、准确的泊入。该模块需同时控制车辆的横向运动和纵向运动。
02
APA硬件架构
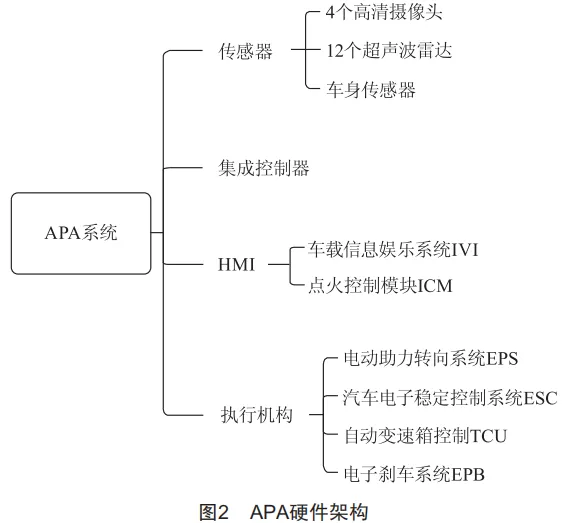
当前市场上典型的APA硬件架构如图2所示,主要包括传感器、集成控制器、人机交互界面(HMI)及执行机构。
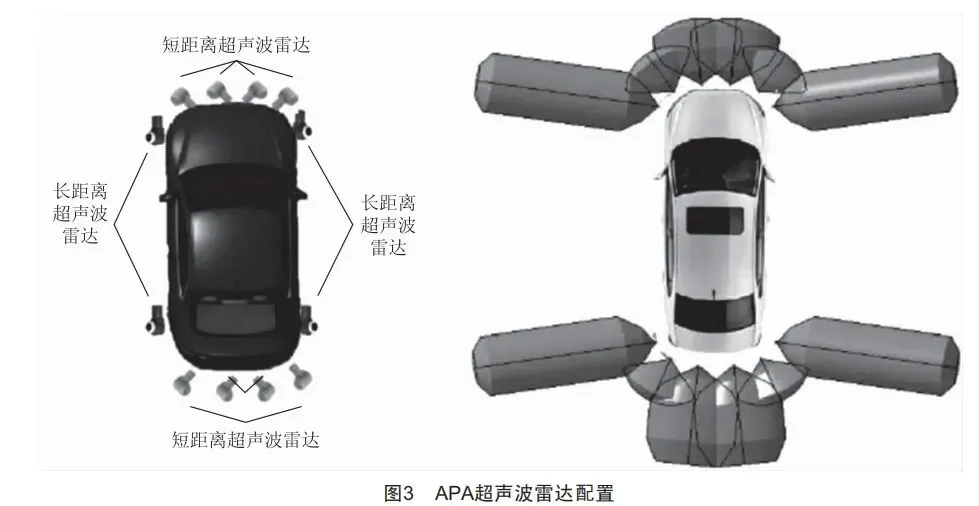
APA系统通常配置12个超声波雷达,其中包括4个长距离超声波雷达(用于探测车身两侧障碍物距离)和8个短距离超声波雷达(用于探测车前和车后障碍物距离),如图3所示。
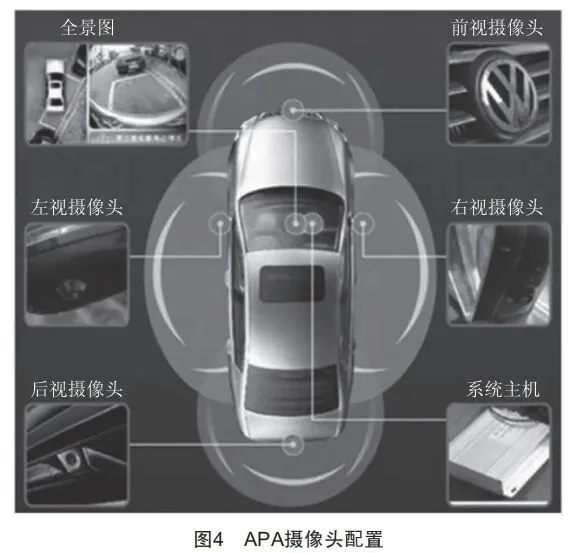
同时,APA系统与AVM系统共用4个高清鱼眼摄像头,用于采集车辆前后左右四个方向的图像并生成360°全景影像,如图4所示。
03
APA泊车控制算法设计
3.1 APA算法功能需求分析
APA系统启动后,利用超声波雷达和360°环视摄像头自动搜索周边可停车位。驾驶员确认目标车位后,系统自动规划路径,并通过决策控制模块控制车辆横向与纵向运动(包括方向盘转角、挡位、车速等),完成自动泊入。结合使用场景与功能控制过程,对APA算法的功能需求分析如下:
(1)系统适用于较低车速(通常在5km/h以下)的工况。(2)车辆能够实现平行车位、垂直车位和倾斜车位三种类型车位的泊入。(3)泊车过程中,APA系统通过对EPS、ESP、EMS、TCU、EPB、VCU的控制,实现对车辆横纵向运动的控制。(4)驾驶员可通过HMI控制APA功能的开启与关闭。(5)整个泊车过程中,涉及用户操作的部分由HMI给出明确提示,形成良好的人机交互。
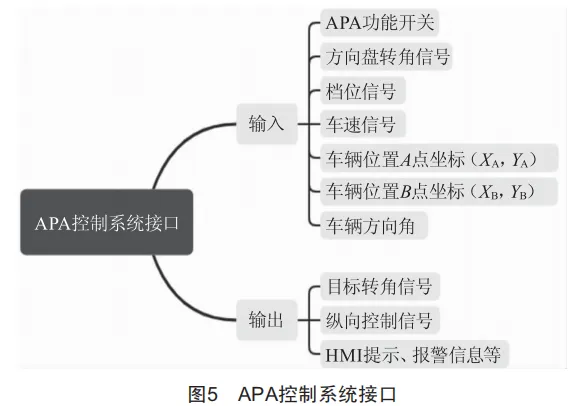
3.2 APA控制系统接口确定
根据APA算法功能需求与硬件架构,确定APA控制系统的输入/输出接口及信号,如图5所示。
3.3 APA平行泊车控制算法设计
3.3.1 扫描车位校验模块
该模块对环境感知模块识别并输出的车位进行校验。结合传感器输出的车位信息(B点坐标)和车身参数,以泊入过程安全无碰撞为约束条件,实时计算车辆能够成功泊入的最短泊车空间距离(L)。将该值与实际可泊入车位尺寸进行比较:若满足可泊入条件,则输出当前识别出的车位;否则继续寻找可泊车位。以平行泊车为例,泊车过程如图6所示。
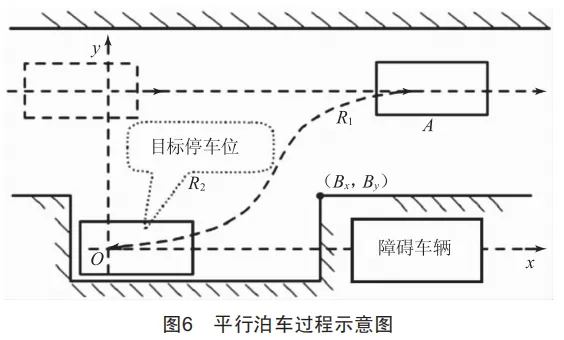
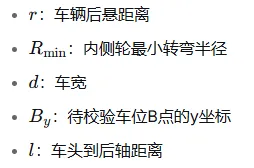
车辆无碰撞且轨迹连续的最短泊车空间计算公式为:

式中:
经校验后的可泊车位信息经坐标转换传输给控制决策模块,一方面用于AVM显示,通过HMI提示驾驶员选择可泊车位;另一方面用于路径规划,为后续算法处理和车辆运动控制提供依据。
3.3.2 泊车初始位置校验模块
该模块对扫描车位校验模块输出的车位进行二次校验。基于车辆当前位置与目标车位位置,以两圆相切理论为规划约束,校验当前车位是否可泊入,如图7所示。
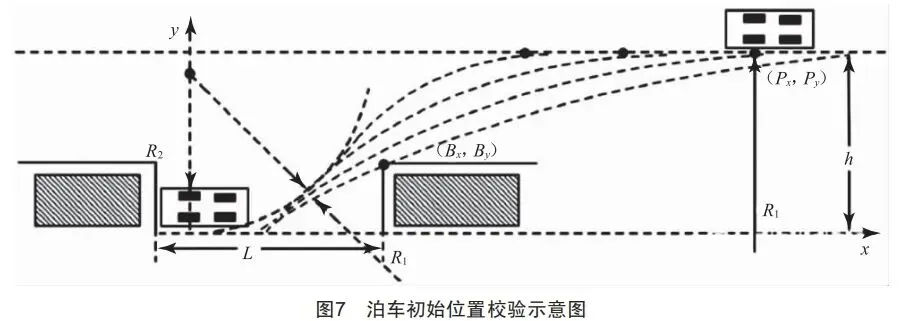
R2 圆弧通常设置为车辆最小转弯半径,以两圆相切及车辆参数为约束,计算出允许泊车的初始位置范围 (Px,PyPx,Py)。将当前车辆位置与该范围比较:若在范围内,则当前车位满足可泊入条件;否则继续寻找可泊车位。
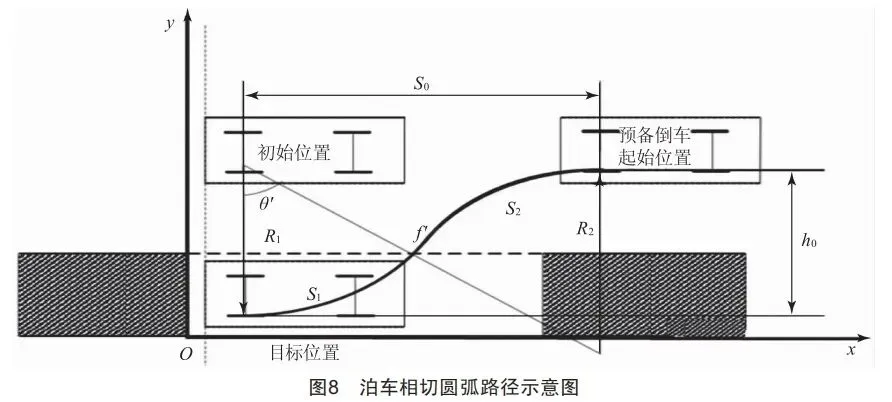
3.3.3 泊车路径规划模块
通过HMI接口选定最终泊车车位后,车辆在控制决策系统控制下逐渐停稳。基于两圆相切原理,该模块完成从车辆当前位置(预备倒车起始位置)到泊车终点目标位置的局部路径规划,生成圆弧-圆弧组合形式的泊车路径,如图8所示。
3.3.4 轨迹跟踪控制模块
基于路径规划模块输出的拟合泊车路径,该模块生成车辆横向与纵向控制的目标值(如方向盘转角、挡位、车速、加速度等输出信号),并根据车辆实时反馈的状态信号进行修正控制,确保车辆准确跟踪规划轨迹。
3.3.5 泊车状态控制模块
该模块主要控制泊车状态的逻辑,需根据HMI、车辆与车位的相对位置、驾驶员操作等信息动态调整与反馈。
泊车主要状态包括:
(1)OFF:泊车功能关闭(2)Standby:泊车功能开启准备(3)ParkingSpaceSearch:寻找车位(4)ParkingSpaceAppear:车位有效(5)AssistParking:辅助泊车(6)ParkingFinish:泊车完成(7)Fail:泊车失败
3.3.6 HMI交互显示模块
该模块根据APA系统的运行状态与驾驶员进行交互,包括显示车位扫描结果、供驾驶员选择目标泊车位等。
04
结语
本文结合主流自动泊车硬件平台,对自动泊车控制系统进行了设计。根据车辆配置确定控制算法接口,结合实际泊车过程确定控制算法流程。环境感知模块利用超声波雷达和摄像头进行车位扫描,路径规划模块主要采用圆弧-圆弧方式进行局部路径规划,控制决策模块负责轨迹跟踪与执行器控制。整个控制算法设计合理有效,为自动驾驶研究奠定了初步基础。
来源:CSDN博主「scott198512」
https://blog.csdn.net/scott198510/article/details/132567892
end
谈思汽车媒体门户

精品活动推荐




AutoSec系列沙龙




专业社群
部分入群专家来自:
新势力车企:
特斯拉、理想、极氪、小米、零跑汽车、阿维塔汽车、智己汽车、小鹏、岚图汽车、蔚来汽车、吉祥汽车、赛力斯......
外资传统主流车企代表:
大众中国、大众酷翼、奥迪汽车、宝马、福特、戴姆勒-奔驰、通用、保时捷、沃尔沃、现代汽车、日产汽车、捷豹路虎、斯堪尼亚......
内资传统主流车企:
吉利汽车、上汽乘用车、长城汽车、上汽大众、长安汽车、北京汽车、东风汽车、广汽、比亚迪、一汽集团、一汽解放、东风商用、上汽商用......
全球领先一级供应商:
博世、大陆集团、联合汽车电子、安波福、采埃孚、科世达、舍弗勒、霍尼韦尔、大疆、日立、哈曼、华为、百度、联想、联发科、普瑞均胜、德赛西威、蜂巢转向、均联智行、武汉光庭、星纪魅族、中车集团、潍柴集团、地平线、紫光同芯、字节跳动、......
二级供应商(500+以上):
中科数测、ETAS、BlackDuck、NXP、上海软件中心、Deloitte、奇安信、为辰信安、云驰未来、信长城、泽鹿安全、纽创信安、复旦微电子、天融信、奇虎360、中汽中心、中国汽研、上海汽检、加特兰微电子、浙江大学......
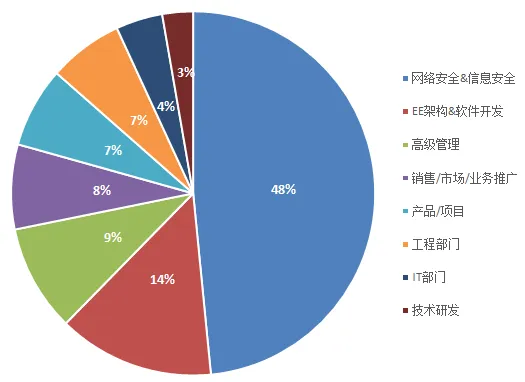
人员占比
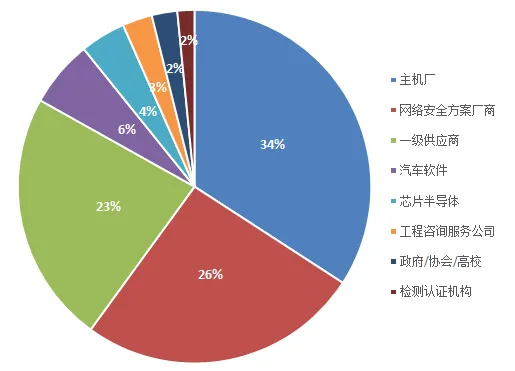
公司类型占比
文章
不要错过哦,这可能是汽车网络安全产业最大的专属社区!
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 20万级纯电轿车:它想挑战小米SU7和特斯拉Model 3霸主地位,有戏吗?
- 13-16万增程SUV怎么选?深蓝S7和零跑C11,我帮你把话说透
- 世界,尽在于心奔驰S级轿车
- 13-16万纯电SUV怎么选?五款车摆在一起,我帮你把话说清楚
- 吉利银河M9:这台大6座SUV为什么能卖这个价格?
- 13-16万德系中型轿车怎么选?帕萨特、迈腾、速派三车深度对比,答案可能跟你想的不一样
- 16万方盒子纯电SUV,取消行李架更简洁,550公里续航够日常通勤!
- 三菱帕杰罗等3款SUV,2026看点很足
- SUV车型:端午世纪大断崖一日通关自驾穿越(6月21日)
- 10万左右SUV推荐!这3款空间大动力强,关键真不贵
