覆盖周期:2026-06-05 至 2026-06-12
🎯 本周核心看点
理想汽车12篇论文入选CVPR 2026,其中SparseWorld-TC获大会口头报告(Oral);
Waymo首次披露世界模型训练框架,将自动驾驶从软件工程问题转变为基础模型问题;
特斯拉FSD v14.3.3推送,全面转向订阅制;
📚 一、学术前沿:世界模型成为新焦点
1. SparseWorld-TC|理想汽车
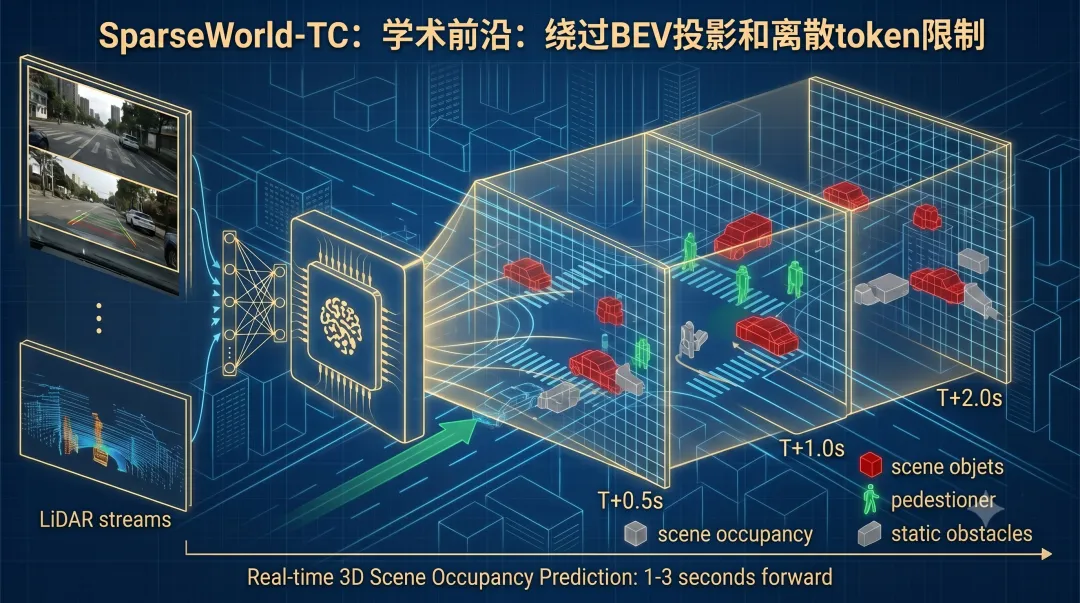
直接从原始图像预测未来3D场景,绕过BEV投影,世界模型从"仿真工具"升级为"认知引擎"。
理想汽车在CVPR 2026上收获颇丰——12篇论文入选,其中SparseWorld-TC更是拿下大会口头报告(Oral)。这篇论文的核心突破在于:直接从原始图像特征端到端预测未来1-3秒的三维场景占据,完全绕过了传统BEV投影和离散token表示的限制。
传统方法需要先把图像"压扁"成BEV(鸟瞰图),这个过程会丢失大量信息。SparseWorld-TC则像人眼一样,直接从原始图像中"想象"未来场景。配合PlannerRFT框架和nuMax仿真器,轨迹推演速度提升10倍。
💡 世界模型不再只是云端训练的数据生成工具,而是可以部署在车端的实时认知引擎。
2. WorldRFT|北京航空航天大学
碰撞率降低83%,纯视觉方案接近激光雷达SOTA。
WorldRFT解决了一个根本问题:现有世界模型"重建世界"的目标和"规划轨迹"的需求是错位的。它通过规划导向型表示学习,把世界模型的优化目标从"完美重建"转向"对规划有用"。
在nuScenes和NavSim测试中,开环碰撞率降低83%,纯视觉方案的闭环表现追平了激光雷达SOTA。项目已开源:https://github.com/pengxuanyang/WorldRFT
3. Waymo World Model|Waymo / Google DeepMind
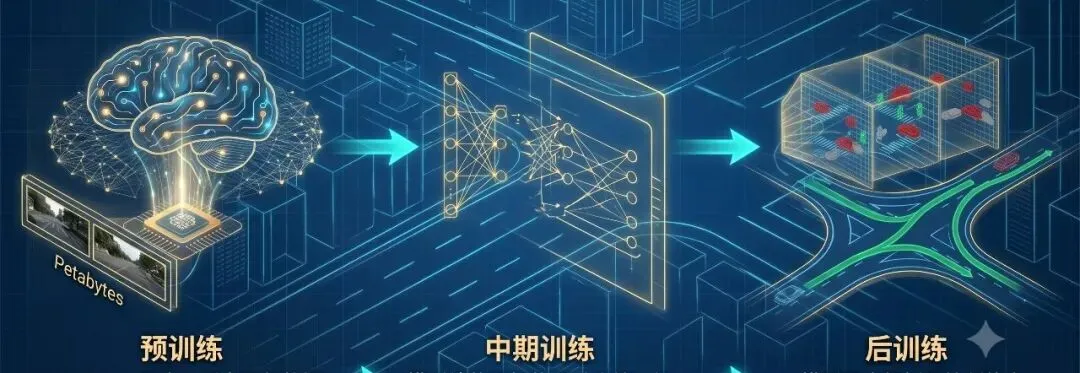
CVPR 2026 Keynote首次披露,基于Genie 3的三阶段训练框架,暗示行业范式迁移。
Waymo在CVPR 2026 Keynote上首次披露了自家的世界模型训练框架,采用类似大语言模型的预训练→中期训练→后训练三阶段范式。这是Waymo首次将自动驾驶从"软件工程问题"重新定义为"基础模型问题"。
4. Drive My Way|UC Riverside / Michigan
首次将"个性化偏好对齐"引入VLA,让自动驾驶学会"你的开车风格"。
现有智驾系统都在追求"标准化"驾驶行为,但真实人类驾驶员风格差异巨大——有人保守,有人激进。Drive My Way通过用户嵌入学习长期驾驶风格,同时支持自然语言指令动态调整短期意图(比如"开快一点""保持距离")。
💡 个性化直接影响用户接受度和付费意愿,是智驾从"能用"到"爱用"的关键一步。
5. FastDriveVLA|小鹏汽车 / 北京大学
VLA模型"瘦身"成功,剪枝50% Token性能不降,FLOPs减少7.5倍。
VLA大模型在车端部署的最大瓶颈是计算负荷。FastDriveVLA提出基于重建的视觉Token剪枝框架,让模型"像人一样开车"——自动过滤无关视觉信息,只关注核心目标。
实验数据亮眼:剪枝50%时所有指标更平衡,视觉Token从3249减少到812,FLOPs减少近7.5倍,预填充时间减少3.7倍。
🏭 二、工业动态:量产落地加速
特斯拉 FSD v14.3.3|订阅制全面替代买断
• 反应速度提升20%,底层重写AI编译器和运行时
• 取消买断制,统一99美元/月(有EAP用户49美元/月)
• Robotaxi扩至奥斯汀全都会区
• 中国AI训练中心已在上海等地运营,专注本土道路场景适配
🔍 商业模式转变:从"卖断"转向"持续服务",为FSD入华做铺垫。
Waymo Ojai|第六代Robotaxi开放测试
• 传感器减少40%,雨雪天气表现反而提升
• 计划2026年底覆盖20+城市,目标每周100万次订单
• 近期完成160亿美元融资,投后估值1260亿美元
🔍 规模化元年:从"技术验证"迈向"规模化商业网络"。
Uber|100亿美元Robotaxi战略
• 与Rivian、Lucid、Waymo、百度、文远知行多方合作
• 布局整车采购+股权投资+运营平台
• 从轻资产平台向"重资产+生态"转型
🔍 争夺用户入口:Robotaxi时代,平台价值可能超过车企。
🔬 三、值得关注的四大方向
1. 端到端自动驾驶的量产落地
头部玩家用不同节奏和技术路线推进:特斯拉纯视觉端到端,数据驱动直觉式驾驶;华为多传感器融合+世界模型,强调风险预判;小鹏VLA路线,语言推理实现可解释决策;地平线一段式端到端,最短路径。关键差异:数据闭环效率、芯片算力、监管审批进度。
2. VLA大模型在自动驾驶中的应用
小鹏3月推送第二代VLA,理想CVPR 2026密集布局,Drive My Way首次引入个性化偏好对齐。但华为明确不走VLA,选择WA(世界模型+动作)。路线分歧将在2026年下半年进一步放大,产业格局尚未收敛。
3. 世界模型与仿真技术
Waymo首次披露基于Genie 3的训练框架,理想SparseWorld-TC(Oral)直接从图像特征预测3D占据。世界模型正从"数据生成工具"升级为"认知引擎",成为连接数据闭环与长尾泛化的核心基础设施。
4. Robotaxi全球化扩张
2026年正成为Robotaxi规模化商业落地的元年:Waymo目标20+城市,每周100万次订单;Uber承诺100亿美元布局;百度Apollo、文远知行、小马智行通过Uber平台加速出海;伦敦、东京、迪拜成为中美竞争新战场。
💰 四、高阶智驾普惠化趋势
• 华为乾崑整车搭载量突破170万辆,合作车型超50款
• 深蓝S07 13.59万元起全系标配华为乾崑智驾ADS 4 SE
• 15万级车型已具备此前30万级车型的智驾体验
智驾价格下探趋势明显,2026年可能是"智驾平权"的关键年份。
📋 五、政策背景
• 中国标准:五项强制性国家标准征求意见,预计2027年7月实施
• 广州:全域开放无人驾驶应用场景
📖 本周论文推荐清单
[1]理想汽车研发团队. SparseWorld-TC: 从原始图像直接端到端预测未来三维场景占据[C]. CVPR 2026 (Oral), 2026.
[2] Peng Xuanyang, et al. WorldRFT: Latent World Model Planning with Reinforcement Fine-Tuning for Autonomous Driving[C]. AAAI 2026, 2026. arXiv:2512.19133.
[3] Nullmax研发团队,浙江大学. DiffRefiner: Coarse to Fine Trajectory Planning via Diffusion Refinement with Semantic Interaction for End-to-End Autonomous Driving[C]. AAAI 2026, 2026. arXiv:2511.17150.
[4]小鹏汽车研发团队, 北京大学计算机学院. FastDriveVLA: Efficient End-to-End Driving via Plug-and-Play Reconstruction-based Token Pruning[C]. AAAI 2026, 2026.
[5] Zehao Wang, Huaide Jiang, Shuaiwu Dong, et al. Drive My Way: Preference Alignment of Vision-Language-Action Model for Personalized Driving[C]. CVPR 2026, 2026. arXiv:2603.25740.
📌 下期预告:2026-06-19,关注CVPR 2026现场动态及Waymo世界模型更多细节