✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。
🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
自动驾驶汽车赛车中的轨迹规划问题具有非线性和非凸性特点,顺序凸规划(SCP)方法是解决该问题的有效手段之一。具体如下:
- 基本原理:SCP 方法通过迭代地求解一系列凸优化子问题来逼近原非凸优化问题的解。在每次迭代中,根据当前解对原问题进行凸化,得到一个凸优化问题,通过不断迭代逐步逼近原问题的最优解。
- 结合模型预测控制:通常会结合模型预测控制(MPC)来实现实时轨迹规划。基于非线性单轨车辆模型和 Pacejka 的神奇轮胎公式,构建实时 MPC 轨迹规划器。先制定一般的非凸轨迹优化问题,再利用 SCP 形成凸近似,将其转化为可求解的形式。
- 凸化轨道约束:传统的顺序线性化(SL)方法凸化轨道约束时,松弛优化问题的解在非凸优化问题中不能保证可行。为此,可引入顺序凸约束(SCR)方法,通过保持轨道约束的凸性,确保生成的解决方案在非凸优化问题中是可行的,提高轨迹规划器的实用性和可靠性。
- 递归可行性分析:在 SCP 框架下,可证明受限优化问题解决方案的递归可行性。这意味着每次迭代都能找到一个可行的解决方案,保证了整个轨迹规划过程的稳定性和收敛性。
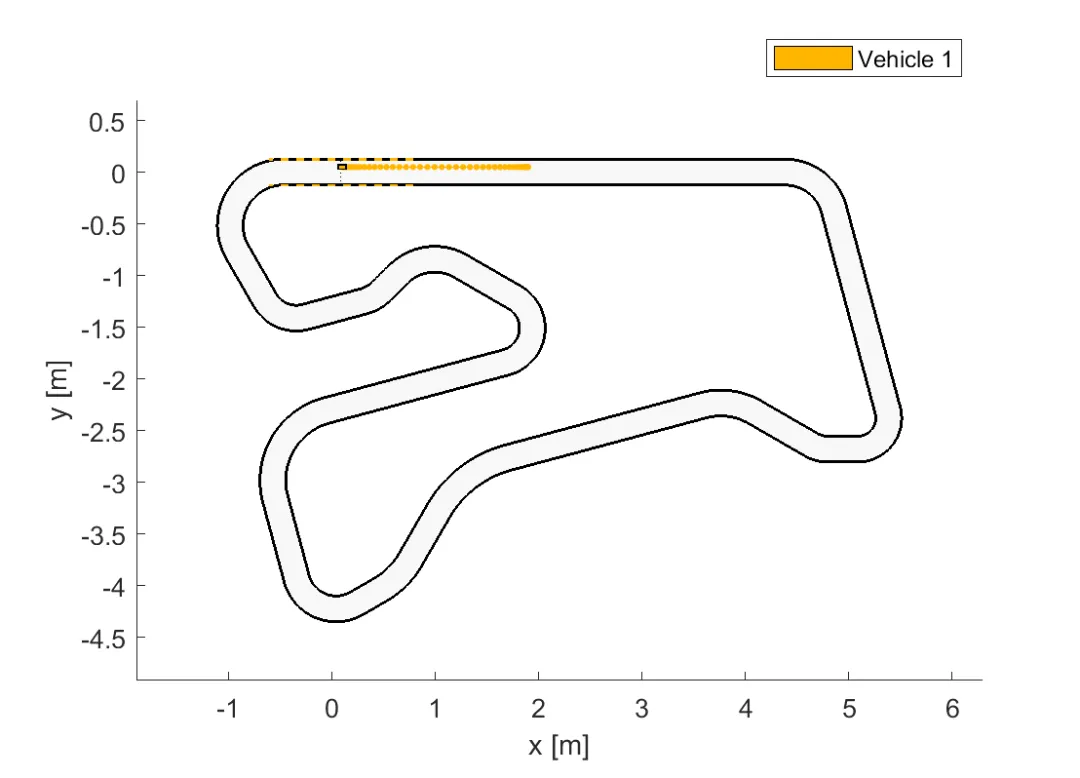
- 模拟实验验证:通常在霍根海姆赛道等赛道的缩放版本上进行模拟实验。结果表明,使用 SCR 的 MPC 比使用 SL 的 MPC 能产生更快的单圈时间,同时保持实时性能,证明了 SCP 方法在提高自动驾驶汽车赛车轨迹规划效率方面的优势。
⛳️ 运行结果
🔗 参考文献
[1]陈康华.无人机辅助的5G通信场景资源分配研究[D].北京邮电大学,2021.
🍅更多免费数学建模和仿真教程关注领取
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
