Yield or not to yield? An inquiry into drivers’ behaviour when a fully automated vehicle indicates a lane-changing intention
让行还是不让行?对全自动驾驶汽车显示变道意图时驾驶员行为的调查
作者:Xiaomeng Li,Oscar Oviedo-Trespalacios,Amir Pooyan Afghari,Sherrie-Anne Kaye,Xuedong Yan
1.引言
随着全自动驾驶汽车(Fully Automated Vehicle,FAV)技术的快速发展,全球范围内对其在道路安全、交通效率及环境影响方面寄予厚望。然而,尽管技术进步迅速,FAV在实际道路环境中的大规模部署仍面临诸多挑战,尤其是与其他道路使用者(如传统车辆驾驶员、行人、骑行者等)的交互问题。现有研究多集中于潜在用户对FAV的接受度、购买意愿及其影响因素,但对那些并不打算购买FAV,却不得不与这些车辆共享道路的驾驶员群体的关注相对不足,关于传统驾驶员在遇到FAV时的具体行为反应,尤其是面对FAV变道意图时的决策过程,研究仍较为有限。这一群体的行为反应将直接影响FAV的融合效果和整体交通系统的安全与和谐。基于上述背景,本文提出了三个主要研究目标:(1)通过在线实验研究传统驾驶员在与FAV交互时的行为意图;(2)识别影响不同行为反应的潜在因素,包括驾驶员特征、一般驾驶行为、过往行为经验及其对FAV的接受度;(3)探索澳大利亚与中国两个国家在驾驶员行为倾向上的跨文化差异。
2.研究内容
本研究聚焦于传统车辆驾驶员在面对一辆意图变道的全自动驾驶汽车时的三种典型行为反应:积极交互(减速让行)、忽视行为(保持速度不理睬)和攻击性行为(加速抢行)。研究考察了四类因素对这些行为倾向的影响,包括驾驶员人口学特征(年龄、性别、驾驶经验等)、日常驾驶行为(用DBQ测量的违规、错误、失误、攻击性及积极行为)、过去在相同情境下对传统车辆的让行频率,以及对FAV的心理接受度(态度、主观规范、感知行为控制、信任)。此外,研究通过比较澳大利亚与中国两个国家的样本,探讨跨文化差异。
3.研究方法
3.1实验场景
研究设计了一个如图1所示的典型的两车道变道场景,场景描述为:“你正在一条单向双车道上行驶,位于右侧车道。前方左侧车道有一辆FAV,此时其右转指示灯亮起,表示意图变道至你所在的车道。”参与者需对三个问题回答其行为可能性:(Q1)减速让行;(Q2)保持速度忽视;(Q3)加速抢行。图1分别针对澳大利亚(左行)和中国(右行)进行了调整,直观展示了车辆相对位置。
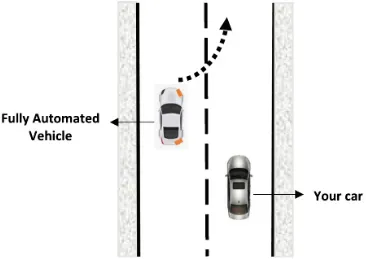
图1 变道场景
3.2实验问卷
实验问卷包括四个部分:
(1)人口学信息(6项):年龄、性别、教育、驾龄、每周驾驶时间、事故经历。
(2)驾驶员行为问卷(DBQ)
(3)过往行为基准(1项):询问在过去类似情境中让行的频率。
(4)FAV接受度问卷(16项):包括态度(5项)、主观规范(3项)、感知行为控制(3项)和信任(5项),采用7点Likert量表。
3.3实验参与者
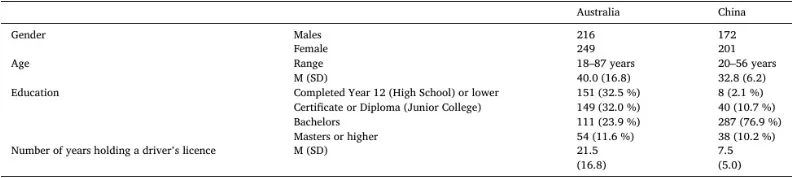
共招募838名有效参与者,其中澳大利亚465人,中国373人。如表1所示,澳大利亚样本年龄范围18–87岁(M=40.0),中国为20–56岁(M=32.8);中国样本中本科学历占比76.9%,远高于澳大利亚的23.9%;澳大利亚驾驶员的平均驾龄为21.5年,中国驾驶员的为7.5年。数据通过Qualtrics/Dynata(澳大利亚)和问卷星(中国)在线收集,参与者需满足居住在当地、年满18岁、持有有效驾照。
表1 样本特征
3.4数据分析方法
由于本研究的因变量——驾驶员在变道场景中采取某种行为(积极、忽视或攻击)的可能性——为离散有序变量(1=极不可能,2=不可能,3=中性,4=可能,5=极可能),不能直接使用普通线性回归。因此,作者采用有序Probit模型进行估计。
在建模之前,作者先进行了相关性分析,剔除相关系数∣r∣>0.7的高度相关变量,以避免多重共线性。同时,计算了Cronbach's α系数检验问卷信度(澳大利亚α=0.8,中国α=0.67)。针对三个行为倾向(积极、忽视、攻击)分别建立了三个独立的有序Probit模型,并分国家(澳大利亚、中国)进行估计,以比较跨文化差异。所有估计均使用标准统计软件完成,结果以系数、标准误、Z值、p值和95%置信区间的形式呈现。
4.研究结果
4.1描述性统计与相关性分析
表2汇总了各变量的均值和标准差(分国家),结果包括:
(1)行为倾向分布:积极交互方面,中国有94.9%的参与者选择可能或极可能,澳大利亚为77.4%;忽视行为方面,中国有81.7%选择不可能或极不可能,澳大利亚为71.2%;攻击性行为方面,中国有75.0%选择不可能或极不可能,澳大利亚为72.2%。
(2)相关性分析:在澳大利亚,年龄与积极交互正相关、与信任负相关;女性比男性更倾向积极交互;高频失误、违规、攻击性行为与忽视或攻击性行为正相关;积极驾驶行为与积极交互正相关。图2显示,过往频繁让行的驾驶员在FAV情境下也更倾向积极交互,表明行为具有跨情境一致性。
表2 变量汇总统计(澳大利亚、中国)
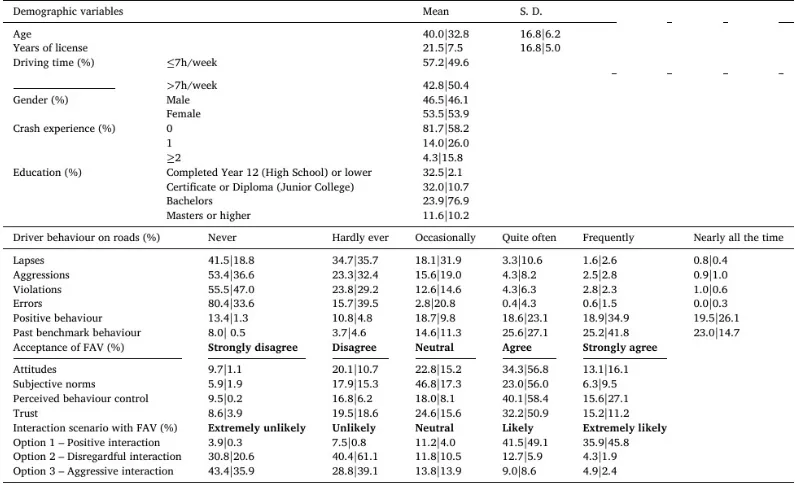
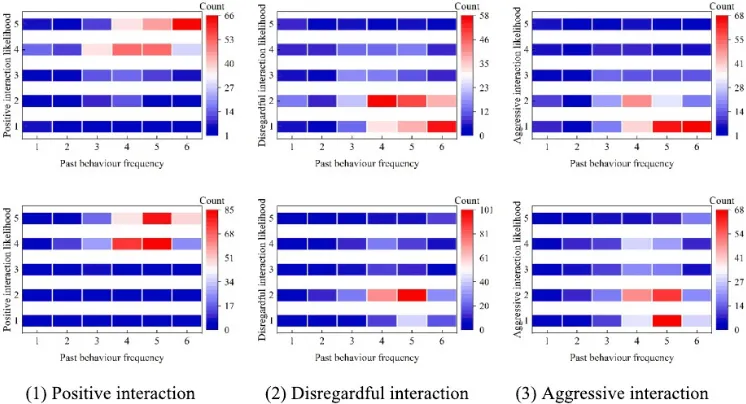
图2 过去基准行为频率和与FAV的交互行为意向的分离分布(上面一行指澳大利亚驾驶员,下面一行指中国驾驶员)
4.2有序Probit模型结果
4.2.1积极交互模型
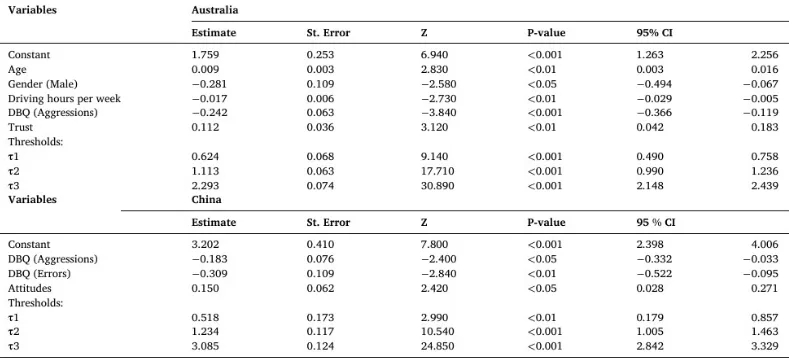
结果如表3所示:
(1)澳大利亚:年长、女性、驾驶时间少、攻击性低、信任高的驾驶员更可能让行。
(2)中国:攻击性和错误行为少、态度积极的驾驶员更可能让行。
表3 情景1模型的结果
4.2.2忽视交互模型
表4 情景2模型的结果
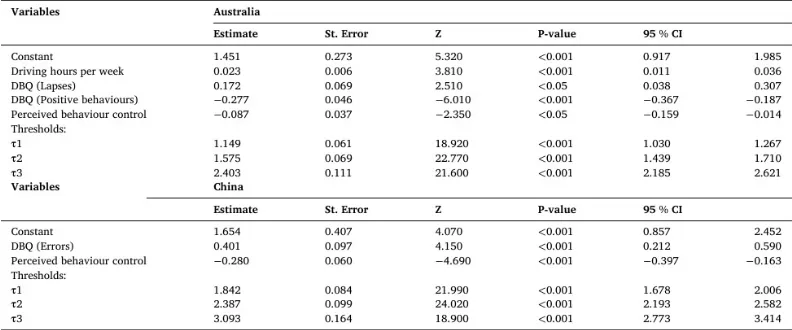
结果如表4所示:
(1)澳大利亚:驾驶时间多、失误多、积极行为少、控制感低的驾驶员更可能忽视FAV。
(2)中国:错误多、控制感低的驾驶员更可能忽视FAV。
4.2.3攻击性交互模型
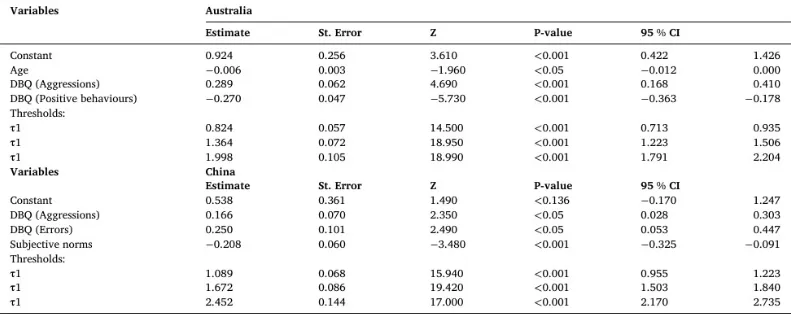
结果如表5所示:
(1)澳大利亚:年轻、攻击性高、积极行为少的驾驶员更可能加速抢行。
(2)中国:攻击性高、错误多、社会压力感知低的驾驶员更可能攻击性反应。
表5 情景3模型的结果
5.结论
本研究通过对澳大利亚和中国838名驾驶员的在线调查,系统探讨了传统驾驶员面对FAV变道意图时的行为反应及其影响因素。结论如下:
(1)行为倾向存在国家差异:中国驾驶员在积极交互上的意愿显著高于澳大利亚,忽视和攻击性行为意愿更低,可能与交通文化、驾驶培训及社会价值观差异有关。
(2)驾驶员特征影响因国家而异:在澳大利亚,年龄、性别、驾驶时间显著影响行为;在中国,这些变量不显著,可能因为中国样本年龄分布集中、驾驶经验较短。
(3)日常驾驶行为是重要预测指标:无论在哪个国家,攻击性驾驶行为始终是预测消极交互(忽视或攻击)的显著因子;积极驾驶行为预测积极交互。
(4)过往行为具有一致性:驾驶员在面对传统车辆时的让行行为,能有效预测其对FAV的行为反应。
6.参考文献
LI Xiaomeng, OVIEDO-TRESPALACIOS Oscar, AFGHARI Amir Pooyan, et al. Yield or not to yield? An inquiry into drivers‘ behaviour when a fully automated vehicle indicates a lane-changing intention. Transportation Research Part F: Psychology and Behaviour, 2023, 95: 405-417.
7.点评
本研究通过在线情景实验与有序Probit模型,对澳大利亚和中国共838名传统车辆驾驶员在面对全自动驾驶汽车变道意图时的行为倾向进行了系统分析。总体而言,该研究为理解传统驾驶员与全自动驾驶汽车之间的交互行为提供了重要的理论依据与实证支持,对自动驾驶汽车的外部交互设计、交通政策制定及驾驶员培训具有参考价值。然而,研究存在一定局限,两国样本在年龄分布、驾驶经验、教育水平上差异较大,可能影响模型的直接可比性;此外,FAV尚未实际普及,参与者基于想象作答可能存在偏差。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 冯桂洲
审核丨 高雅
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
