像素之间隐藏的秘密,正被一层层智能网络揭开。
当我们谈论自动驾驶汽车如何“看见”世界时,总会听到一个专业名词——卷积神经网络。这个听起来高深莫测的技术,其实是让机器理解视觉世界的核心钥匙。今天,就让我们一起揭开这项技术的神秘面纱。
想象一下,你正坐在一辆自动驾驶汽车里。车辆平稳地行驶在公路上,它识别着前方的交通信号灯、避开突然出现的行人、判断着与其他车辆的安全距离。这一切决策的基础,都源于汽车对周围环境的精准感知。
而这双“智能眼睛”背后,正是卷积神经网络在发挥作用。
什么是卷积神经网络?
简单来说,卷积神经网络是一种专门处理像图像这类网格状数据的智能系统。它模仿了人类视觉系统的工作方式——不是一眼就看到整个场景,而是从局部细节开始,逐步拼凑出完整的理解。
比如当你看到一只猫时,你的大脑不会瞬间识别出“这是一只猫”,而是先注意到边缘、轮廓,然后组合成耳朵、胡须、尾巴等特征,最后才得出“猫”的结论。卷积神经网络也遵循类似的逻辑。
传统处理图像的方法需要人工设计特征提取规则,而卷积神经网络则能自动从数据中学习该提取什么特征。这种能力让它特别适合处理自动驾驶中复杂的视觉任务。
从像素到理解:CNN如何工作?
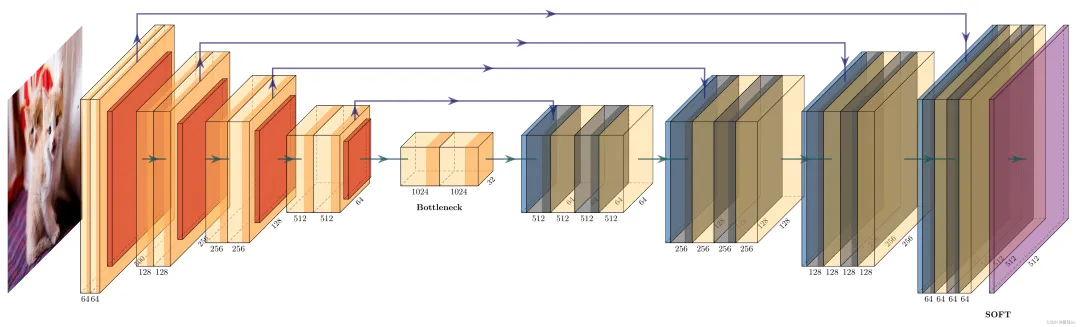
卷积神经网络的核心过程可以概括为三个关键步骤:局部感知、特征提取和层层抽象。
先看局部感知。卷积神经网络不像传统神经网络那样把整张图像一次性全部处理,而是使用一个叫做“卷积核”的小窗口,在图像上滑动扫描。
这个滑动窗口就像汽车摄像头的一小部分注意力,每次只关注图像的局部区域。窗口内的像素会与卷积核进行特定计算,生成新的数值。这些数值共同构成了一张“特征图”,它保留了原始图像的重要信息,但形式更加紧凑。
接着是特征提取。在训练过程中,网络会自动调整卷积核的参数,让它能够识别出有用的特征。早期的卷积层可能学会识别简单的边缘、线条;中间层则能识别纹理、形状;而深层网络可以识别更复杂的模式,比如车轮、车窗、人脸等。
不同的卷积核就像不同的“专家眼睛”,有的专门找垂直线,有的专门找水平线,有的专门找特定颜色过渡。多个这样的“专家”一起工作,就能全面理解图像内容。
最后是层层抽象。卷积神经网络通常由多个层级组成,每一层都在前一层的基础上进行更高层次的理解。通过这种层层递进的方式,网络最终能够从原始像素中识别出复杂的物体和场景。
例如,第一层可能识别出几个边缘;第二层把这些边缘组合成车轮的轮廓;第三层识别出完整的汽车形状;再加上颜色、位置等信息,网络就能判断“前方10米处有一辆红色轿车”。
为什么CNN特别适合处理图像?
你可能会有疑问:为什么一定要用卷积神经网络?用普通的神经网络不行吗?
关键在于效率。一张普通的汽车摄像头图像可能包含数百万像素。如果使用传统全连接网络处理,每个像素都需要与下一层的每个神经元连接,这将产生天文数字般的参数,计算量巨大,训练极其缓慢。
卷积神经网络则通过两种设计巧妙解决了这个问题:局部连接和参数共享。
局部连接意味着每个神经元只与前一层的一小部分区域相连,这大幅减少了连接数量。参数共享意味着同一个卷积核在整个图像上滑动使用,而不是每个位置都用不同的检测器,这又进一步降低了参数数量。
这两种设计不仅让计算变得可行,还带来了一个重要特性:平移不变性。简单来说,无论物体出现在图像的哪个位置,网络都能识别它。这对于自动驾驶至关重要——汽车无论在车道左侧还是右侧,都应该是汽车。
CNN在自动驾驶中的实际应用
在自动驾驶系统中,卷积神经网络承担着多种关键任务:
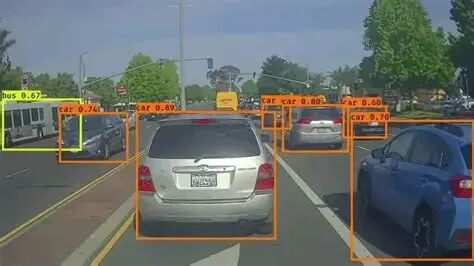
环境感知是CNN最基础也是最重要的应用。通过分析摄像头捕捉的图像,CNN可以识别车道线、交通标志、信号灯、行人、车辆、障碍物等。特斯拉的Autopilot系统就大量使用CNN进行环境理解。
目标检测与跟踪不仅要知道图像中有什么,还要知道它们在哪里、往哪里移动。基于CNN的目标检测算法如YOLO、Faster R-CNN等,能够实时框出图像中的各个物体并分类,同时跟踪它们的运动轨迹。
语义分割更进一步,它为图像的每个像素都分配一个类别标签,区分出哪里是道路、哪里是人行道、哪里是天空。这种精细理解对于自动驾驶的路径规划至关重要。
深度估计让二维图像有了三维理解。一些CNN架构能够从单目摄像头图像中估计物体的距离,虽然不如激光雷达精确,但成本更低,可作为重要补充。
除了自动驾驶,卷积神经网络在制造业中也有广泛应用。工业视觉检测系统利用CNN识别产品缺陷,精度和速度远超人工;智能分拣机器人通过CNN识别不同零件并进行分类抓取;预测性维护通过分析设备图像,提前发现异常迹象,避免生产线意外停机。
不断进化的CNN架构
自卷积神经网络概念提出以来,研究人员不断改进其设计,让它在保持准确性的同时更加高效。
早期的LeNet是CNN的先驱,成功应用于手写数字识别。2012年的AlexNet则在ImageNet图像识别竞赛中取得突破性成绩,点燃了深度学习的热潮。随后的VGG网络证明,使用多层小卷积核比使用少数大卷积核效果更好。
Google提出的Inception网络采用并行结构,让网络能够同时捕捉不同尺度的特征。ResNet则通过残差连接解决了深层网络训练困难的问题,使训练上百层的网络成为可能。
针对移动和嵌入式设备(如汽车计算平台)的需求,轻量级网络如MobileNet应运而生。它使用深度可分离卷积大幅减少计算量,让复杂的视觉模型能够在资源有限的设备上实时运行。EfficientNet则通过平衡网络深度、宽度和输入图像分辨率,在精度和效率间找到最优平衡。
这些架构演进不仅推动了学术进步,也直接促进了自动驾驶技术的商业化落地。更高效、更准确的视觉模型,意味着更安全、更低成本的自动驾驶系统。
CNN的局限与挑战
尽管卷积神经网络取得了巨大成功,但它并非万能,特别是在自动驾驶这种安全关键的应用中,我们需要清醒认识其局限性。
长距离依赖问题是CNN的一个固有弱点。由于卷积操作主要关注局部区域,要理解图像中相距较远部分之间的关系,需要堆叠很多层卷积。这可能导致重要信息在传递过程中被稀释。
旋转和尺度变化仍然挑战着CNN的鲁棒性。虽然数据增强和网络设计可以在一定程度上缓解这个问题,但当物体以训练数据中未见过的方式出现时,网络的性能可能下降。
对抗性攻击暴露了CNN的脆弱性。研究人员发现,对图像添加人眼难以察觉的微小扰动,就可能导致CNN完全错误地识别图像内容。这对自动驾驶安全构成了潜在威胁。
可解释性问题也不容忽视。CNN通常被视为“黑箱”,我们难以理解它做出特定决策的具体原因。当自动驾驶汽车出现错误判断时,追查原因变得困难。
为了解决这些问题,研究者们正在探索多种方向。注意力机制让网络学会关注图像中的重要区域;Transformer架构被引入视觉任务,更好地建模全局依赖关系;多模态融合结合摄像头、激光雷达、毫米波雷达等多种传感器数据,提高系统的鲁棒性。
CNN的未来与自动驾驶的明天
自动驾驶技术正处在快速发展期,而卷积神经网络作为其视觉感知的核心组件,也在持续演进。
未来的CNN可能会更加专业化,针对自动驾驶的具体需求进行优化。比如专门为夜间驾驶、恶劣天气或复杂城市环境设计的网络架构。
神经架构搜索技术可能让设计网络的过程更加自动化,找到更适合特定任务和硬件平台的网络结构。边缘计算的发展则让更强大的CNN模型能够在车端实时运行,减少对云端计算的依赖。
与此同时,CNN正与其他技术融合。强化学习可以帮助自动驾驶系统在CNN感知的基础上做出更优决策;仿真环境为CNN提供了近乎无限的训练数据,加速其发展。
值得思考的是,随着技术的进步,我们是否过度依赖单一的视觉系统?当摄像头被污垢覆盖或被强光照射时,自动驾驶汽车如何保证安全? 多传感器融合是否是必然选择?这些问题的答案将决定自动驾驶技术的未来发展方向。

从手机相册的人脸识别到工厂的质量检测,从医学影像分析到自动驾驶的环境感知,卷积神经网络已经深入我们生活的方方面面。
它让我们能够教会机器“看见”和理解世界,这项技术本身也像它的工作方式一样——从简单的概念开始,逐步构建起复杂而强大的能力体系。
自动驾驶的普及之路还很长,但正是卷积神经网络这样的基础技术,让我们离那个未来越来越近。下一次当你看到自动驾驶汽车在路上测试时,你会知道,它的“眼睛”正通过成千上万个微小的卷积核,努力理解着这个复杂而美丽的世界。
关于自动驾驶的视觉系统,你最关心的是什么?是它的安全性、成本,还是它背后的技术原理?欢迎在评论区分享你的看法!
内容来源:网络
本期编辑:小艾
论文投稿:作为领先的高科技先进制造技术产业服务平台,AMT接受学术论文投稿;稿件的发布完全是公益和免费的;论文投稿邮箱:info@amtbbs.org
版权声明:AMT尊重版权并感谢每一位作者的辛苦付出与创作;除无法溯源的作品,我们均在文末备注了来源;如文章、视频、图片、文字涉及版权,请原创作者第一时间联系我们,我们将根据您提供的证明材料确认版权后立即删除内容或按国家规定标准支付稿酬!





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
