
汽车产业已进入智能化竞争下半场。2025 年 1 月 —7 月,我国 L2 级乘用车新车累计销量达 775.99 万辆,渗透率高达 62.58%,同比增长 6 个百分点,智能网联汽车发展正式驶入快车道。
在汽车智能化发展浪潮中,人工智能成为推动行业发展的核心力量,其在汽车领域的应用呈现 “全域渗透、全链赋能、全线升级” 的显著特征,正深度赋能并将持续推动汽车产品智能化与汽车产业数智化,与汽车产品及全产业链实现广泛且深度的融合。
一、人工智能赋能驾驶自动化:架构简化与场景适配升级
驾驶自动化领域,端到端架构已成为行业发展共识。通过将传统功能模块整合至单一神经网络,实现从传感器数据到车辆控制指令的直接映射,驾驶自动化算法架构持续简化,规则算法占比不断减少。结合大模型技术的深度应用,系统对长尾场景的应对能力得到显著提升,驾驶自动化的可靠性与适应性持续优化。
二、人工智能赋能座舱智能化:交互升级与服务个性化
智能座舱领域,深度融合语音识别、自然语言处理、计算机视觉、多模态大模型等人工智能技术,以用户体验为核心构建多模态交互与个性化服务框架。人机交互模式从被动响应向主动交互转变,智能座舱正加速向 “智能体” 方向演进,为用户提供更贴合需求的沉浸式驾乘体验。
三、人工智能赋能研发生产:模式革新与效率提升
研发生产领域,传统模式正被快速颠覆。在人工智能与数字孪生等技术的协同作用下,研发流程从经验驱动转向数据驱动,显著缩短开发周期、降低试错成本;同时推动柔性制造体系构建,支持多车型混线生产,大幅提升工厂自动化与智能化水平,助力产业降本增效。
为进一步推动跨行业跨领域技术交流与创新实践,加速人工智能技术在汽车领域的深度融合与创新应用,我们开展了本案例集的征集和编制工作。自 3 月启动征集以来,活动得到行业各界的广泛关注与大力支持。在此,谨向所有支持单位及提供宝贵意见建议的专家表示衷心感谢!
期待本案例集能够为行业提供兼具参考价值的研究与实践借鉴,为推动人工智能在汽车领域的典型应用与创新发展作出积极贡献。
绝影开悟世界模型:商汤绝影多模态大模型赋能智驾数据生产

一、核心概况
- 研发主体:上海临港绝影智能科技有限公司(商汤绝影)
- 核心定位:基于多模态大模型打造的世界模型,具备物理规则与交通规则理解能力
- 关键指标:支持生成 11V 视角(含鱼眼和针孔相机)、150 秒时长、1080P 分辨率视频
- 行业荣誉:2023 年起,连续两年在 Waymo Sim Agents 全球竞赛中斩获第一名
二、需求背景与行业痛点
1. 核心需求
驾驶自动化研发转向数据驱动,模型对高质量数据的需求呈爆发式增长,需解决传统数据获取模式的瓶颈。
2. 行业痛点
- 数据获取难题:多数车企受高阶辅助驾驶量产规模、算力资源限制,难以复制特斯拉 “百万辆级量产车 + 超 10 万 petaFLOPS 算力” 的数据回流体系,存在数据获取难度大、效率低、成本高的问题。
- 技术实现难点:世界模型需保持视频时空一致性,生成视角越多难度越高,且需克服鱼眼视角畸变,目前行业多局限于 1V 或 6V 视角视频生成。
3. 产品优势
“绝影开悟” 可生成 11V 多视角时空一致视频,兼容行泊全集场景需求,适配性强,突破行业视角生成与时空一致性瓶颈。
三、大模型技术方案与核心能力
1. 面向量产的数据生成
- 支持 100 多个维度组合生成多样化场景(如 Cut-in 场景),涵盖不同光照、天气、道路等级、车型、距离及车速等变量。
- 高效生成极端风险场景(如车祸、道路塌陷等),仅需输入提示词即可完成,解决此类场景采集难、成本高的问题。
2. 复杂场景自由复现
可灵活修改场景要素,包括替换 / 插入 / 删除车辆、调整道路布局与车辆速度,创造稀缺复杂场景,丰富训练数据多样性。
3. 近实时交互能力
- 交互效率较行业 SOTA 提升 5 倍,仿真训练响应更高效逼真。
- 感知结果与真实精标数据契合度达 98%,有效避免 Sim-to-Real 迁移时的能力退化,为端到端模型搭建 “云端虚拟训练场”。
四、技术创新点
构建辅助驾驶领域虚实融合的数据范式,以人、物体、场景为核心,通过领先大模型技术生成时空一致的第一视角与第三视角数据,为具身智能打造全新 4D 真实世界数据支撑。
五、实施效果与应用落地
- 数据应用占比:目前绝影 20% 的智驾训练数据由该世界模型生产。
- 落地项目:已应用于行业首批 J6M 辅助驾驶方案、绝影一段式端到端方案(东风汽车落地)等多个智驾项目。
Momenta 飞轮大模型:量产智驾大模型的规模化落地实践

一、核心概况
- 研发主体:魔门塔(苏州)科技有限公司(Momenta)
- 核心定位:量产级智驾大模型,采用 “高质量训练数据 + 低成本训练方法”,基于数据驱动策略构建
- 技术与产品战略:以 “飞轮” 技术洞察为核心,结合 “量产辅助驾驶(Mass Production)+ 自动驾驶(Scalable Robo)” 的 “两条腿” 产品战略
- 核心目标:提供多级别智驾解决方案,实现高效规模化落地,赋能安全、便捷、高效的智慧出行
二、需求背景与行业痛点
1. 产品安全可靠需求
- 传统规则驱动方案难以解决自动驾驶长尾问题,算法迭代缓慢,复杂城市场景应对能力不足
- 未知风险场景难以预判,极端场景下的技术可靠性亟需提升
2. 规模化推广需求
- 高阶辅助驾驶软硬件成本偏高,制约向 15 万以下大众车型渗透,而消费者对驾驶自动化功能需求持续增加
- 中国汽车产业进入出海关键阶段,智能辅助驾驶需满足全球不同区域差异化场景落地需求,要求方案具备强泛化能力、高效率及成本可控性
三、大模型技术方案与核心能力
1. 数据驱动 + 海量数据支撑
- 本质是一段式端到端大模型,减少对人工编码的依赖,泛化能力更强,面对未知场景具备更优决策能力(即使感知模型无对应物体定义,仍能合理避让,解决长尾问题)
- 量产车辆日均收集超 60 万个有价值场景,累计沉淀 7000 万 + 条多场景、多环境、不同天气及光照条件的 Event 数据,全面覆盖真实场景 Corner case,降低未知与极端场景风险
2. 闭环自动化工具链
- 实现海量数据的低成本、高效率处理,驱动算法高效迭代与高质量交付,当前自动化问题解决率超 95%,显著降低人工成本,加速长尾问题解决
3. 灵活适配多场景与车型
- 能源类型适配:支持纯电车、燃油车、混动车型等不同能源车型
- 价格区间覆盖:可根据车型软硬件配置灵活调整,覆盖高端车型至 10-15 万大众车型
- 场景范围拓展:“无图方案” 推动智驾功能从 “全国都能开” 向 “全球都能开” 升级,助力辅助驾驶进入 “标配时代”
四、技术创新点
- 第五代飞轮大模型(2024 年发布):创新性整合感知与规划为统一模型,实现一段式端到端深度学习;采用 “长期记忆 + 短期记忆” 模式,模拟人脑 “直觉推理 + 逻辑分析” 机制,自动化问题解决率超 95%,大幅提升系统可靠性与稳定性
- 第六代飞轮大模型(2025 年规划):引入 “强化学习 + 闭环训练”,建立虚拟环境自主探索机制,将实现安全、性能、体验的倍数级提升
五、实施效果与应用落地
- 量产车型合作:定点车型近 130 余款,预计 2028 年搭载飞轮大模型的量产车辆将达 1000 万台
- Robotaxi 业务布局:复用量产车型的软件算法架构与传感器方案,实现 L2 与 L4 技术协同,加速 Robotaxi 规模化落地与商业闭环,计划在北京、上海陆续推出 L4 级 Robotaxi 业务
地平线 Horizon SuperDrive(HSD):国产大算力芯片赋能一段式端到端辅助驾驶
一、核心概况
- 核心系统:全场景辅助驾驶系统 Horizon SuperDrive(HSD)
- 硬件支撑:搭载国产大算力智驾芯片征程 6P(自主知识产权设计)
- 核心优势:国内先进的软硬结合全栈开发方案,实现 “光子输入到轨迹输出” 超低时延,提升驾驶安全、效率与舒适性
二、技术方案
1. 硬件芯片:征程 6P 性能突破
- 核心配置:搭载 4 核 BPU 纳什,AI 算力达 560 TOPS;采用 LPDDR5 存储接口,带宽高达 205 GB/s
- 算法适配:高效支撑大参数 Transformer、大规模交互式博弈算法,内置丰富算子库,加速端到端与交互博弈算法普及
- 性能优势:相较于业内主流芯片,对 Transformer 类算法的支持效率(FPS)最高提升 40 倍
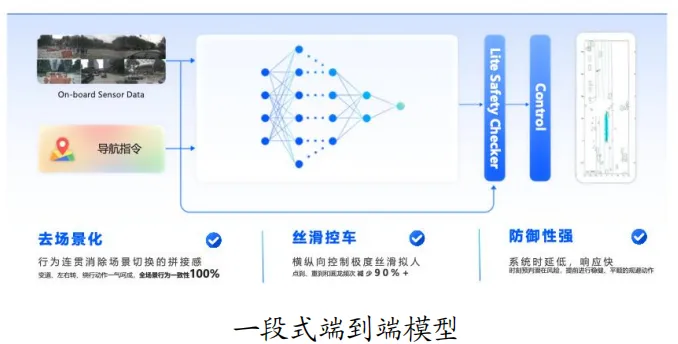
2. 软件算法:一段式端到端全链路融合
- 架构设计:将感知、预测、规划全链路融合进统一模型,消除场景切换拼接感,系统行为更连贯
- 核心能力:具备环境理解、多模态轨迹生成与个性化决策能力,面对复杂城区道路可直接输出变道、转弯、绕行等动作指令
- 技术特征:兼具系统超低时延、更强防御驾驶能力、横纵向耦合控制及持续自我进化四大优势
3. 技术协同:软硬强耦合优化
- 芯片底层适配:征程 6P 在计算单元、缓存体系设计上贴合智驾大模型运行需求,与软件强耦合时计算效率最大化
- 部署优化:模型设计匹配征程 6P 数据精度支持能力,搭配 AI 模型工具链实现低精度损失部署,充分释放软件性能
三、技术创新点
- 自主可控硬件:征程 6P 基于自主知识产权研发,底层设计深度适配智驾大模型,软硬协同效率最优
- 算法架构革新:采用 “一段式端到端 + 强化学习” 方案,实现从感知到控制的全链路打通,超低时延响应
- 自我进化能力:通过强化学习实现模型自我探索,持续激发潜力,在防御性驾驶、横纵向控车等方面性能持续提升
四、实施效果与应用落地
1. 核心性能指标
- 类人性提升 50%,变道博弈成功率、复杂路口通行效率与人类驾驶水平相当,逐步迈向 “超越人”
- 路口通行效率提升 67%,场景覆盖率达 100%,较传统方案优势显著
2. 量产合作落地
- 首发合作:2025 年奇瑞集团成为征程 6P 及 HSD 首发量产合作车企,星途品牌车型全球首发搭载
- 重要合作:与大众汽车集团在高阶智驾领域深化合作,合作车型将于 2026 年正式落地
- 市场覆盖:截至 2025 年 12 月,已获得国内外 10 余家车企品牌、20 多款车型的定点合作
小马智行第七代自动驾驶系统:L4 级全场景无人驾驶的规模化落地标杆
一、核心概况
- 成立背景:2016 年成立,致力于提供安全、先进、可靠的自动驾驶技术与解决方案,推动未来交通变革
- 系统定位:L4 级全场景自动驾驶软硬件系统,100% 采用车规级零部件,专为规模化量产设计
- 首发与合作:2025 年 4 月上海车展全球首发,合作车企包括北汽新能源、丰田汽车、广汽埃安,推出极狐 T5、丰田铂智 4X、广汽埃安三款 Robotaxi 车型
- 落地规划:2025-2026 年实现千台量级落地国内一线城市,2026 年底车队规模将达 3000 辆
二、需求背景与行业痛点
1. 技术与运营基础
小马智行历经 “安全员测试 — 无人化测试” 阶段,2023 年 9 月率先在北京获得全无人 + 载人 + 收费运营测试许可,后续陆续拿下广州、深圳、上海同类型许可,累积超 5000 万公里测试里程与 50 万小时全无人运营经验。
2. 行业竞争格局
全球无人驾驶头部企业集中于中美两国,Robotaxi 商业化落地成为技术竞争核心赛道,需突破成本、场景适配、可靠性三大关键瓶颈,实现规模化运营闭环。
三、技术方案
1. 硬件配置:车规级冗余设计
- 核心芯片:搭载 4 颗 Orin-X 车规级芯片,域控算力达 1016 TOPS,设计寿命 10 年 60 万公里
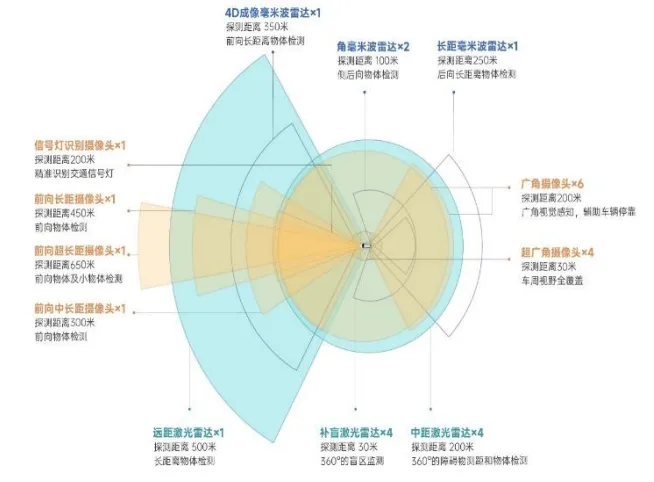
- 传感器系统:6 大类 34 个量产传感器(含 9 颗激光雷达、14 颗摄像头、4 颗毫米波雷达等),实现 360° 无盲区感知,最远探测距离 650 米
- 性能优化:通过软件算法优化,算力使用效能提升 3 倍;域控系统体积、重量、功耗较前代下降超 50%
2. 软件算法:全场景安全赋能
- 核心技术:基于强化学习范式的世界模型(PonyWorld)打造虚拟司机(Virtual Driver),安全性比人类驾驶高出 10 倍
- 感知能力:多传感器深度融合,支持雨、雪、雾等恶劣天气及暗光、无光场景检测,可精准识别低对比度物体与交通标识
- 定位与决策:厘米级多源定位结合高精度地图,预测模块可实时预判交通参与者轨迹,规划控制模块实现厘米级控车
3. 架构平台:自主研发适配车载场景
- 自研 PonyBrain 车载系统,优于传统 ROS 系统,资源占用更低
- 支持复杂深度学习模型部署与软件快速迭代,满足功能安全开发要求
四、技术创新点
- 模块化通用设计:支持多款车型灵活部署,可延伸至 Robo-truck,座舱功能、传感器配置等可快速上车
- 传感器自清洁方案:通过压缩空气喷射、喷水清洗等功能,解决水滴、雾气、脏污导致的感知精度下降问题
- 多重安全冗余:具备超 20 项安全冗余、超 1000 项检测设计及多重降级策略,应对各类单点失效场景
- 成本优化架构:通过系统工程与算法优化,核心硬件成本大幅下降,车载计算单元成本较前代降 80%
五、实施效果与应用落地
1. 核心成效
- 适配性:实现前装级别完美适配,为正式前装量产奠定基础
- 产业链赋能:赋能主机厂、运输企业及上下游配套企业,构建产业协同生态
- 商业化支撑:自动驾驶套件 BOM 成本较前代下降 70%,2026 年预计再降 20%,推动商业闭环
2. 落地进展
- 量产规模:已量产下线超 600 台,2025 年 11 月起在北京、广州、深圳核心区域开展全无人驾驶商业化运营
- 运营数据:广州单区域单位经济模型(UE)转正,日均订单 23 单,人车配比达 1:20,年底将优化至 1:30
- 合作升级:与北汽新能源深化 “五位一体” 战略合作,布局中东、欧洲海外市场
- 场景覆盖:覆盖机场、高铁站、商圈及早晚高峰时段,支持城区、高速、环路场景一体化运营

