最近,你是不是也经常听到“纯视觉自动驾驶”这个词?不少车企和科技公司都在谈论它,说它能用更低的成本让车子自己开起来。但只靠摄像头,真的能行吗?今天,我们就来深入聊聊这个话题,看看它的优势和劣势到底在哪里。
什么是纯视觉自动驾驶?
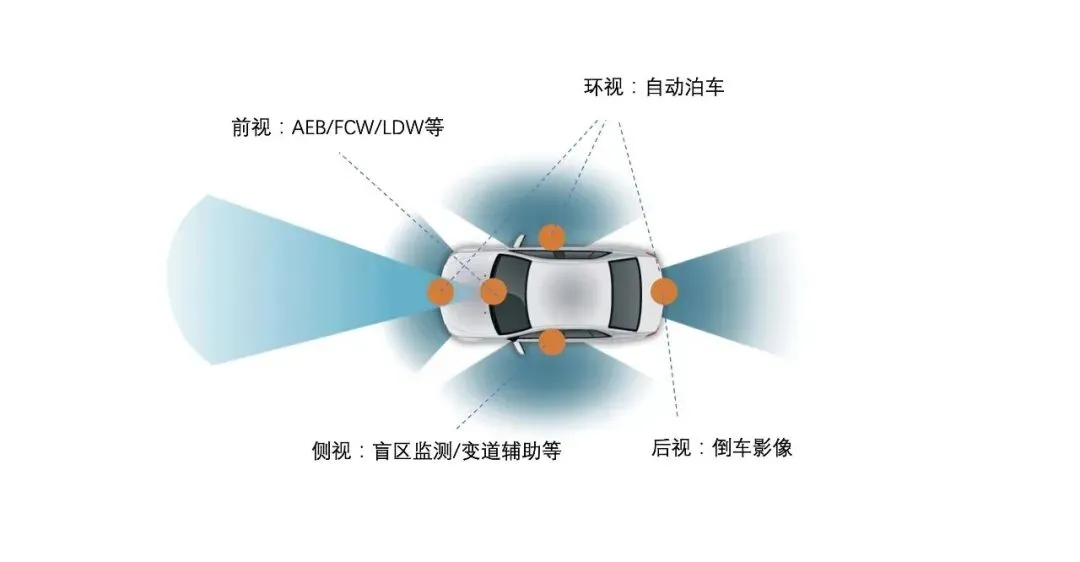
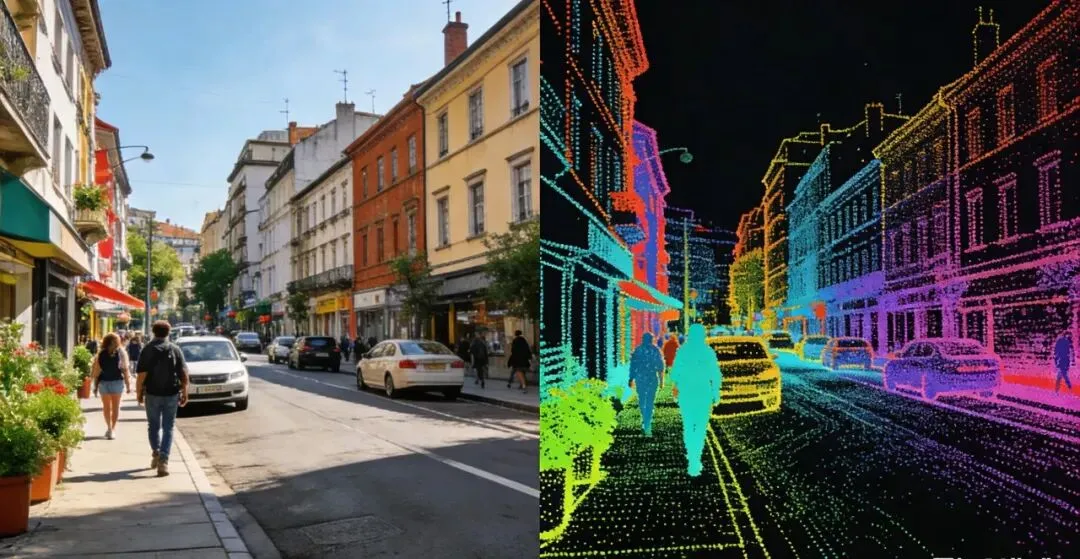
简单来说,纯视觉自动驾驶就是车子不依赖激光雷达、毫米波雷达这些常见的传感器,而是像人一样,只靠摄像头来“看”路。车载摄像头从不同角度拍摄周围环境,然后通过图像处理算法和深度学习模型,识别出车辆、行人、交通标志、车道线等信息,最终做出加速、刹车、转向等驾驶决策。
这套系统的核心在于:从二维图像中推断三维世界。这不是简单的计算,而是算法通过大量数据学习出来的“经验”。模仿人类视觉,是它的基础,但也正是它所有优缺点的根源。
优势:为什么它吸引人?
第一,成本低,容易推广。
在先进制造业中,成本控制是关键。摄像头硬件便宜、体积小,安装方便,而激光雷达过去价格昂贵,现在虽然降价,但仍比摄像头高得多。对于想大规模量产自动驾驶车型的车企来说,用摄像头能显著降低整车成本,让更多消费者买得起。
第二,图像信息丰富,语义理解强。
摄像头拍下的是彩色图像,里面包含颜色、纹理、文字、符号等大量细节。这些信息对于理解交通灯变化、识别道路标志、判断行人手势等复杂场景非常有用。相比之下,激光雷达输出的点云数据更注重几何形状,在语义层面不如图像直接。
第三,数据格式统一,算法开发更专注。
纯视觉方案只处理图像数据,这简化了开发流程。工程师可以集中精力优化图像识别模型,不需要花太多时间整合不同传感器数据。这种一致性有助于快速迭代和升级系统。
另外,随着数据积累和算法进步,纯视觉系统在预测动态对象意图方面也有潜力。例如,通过分析行人姿态或前车轨迹,它能提前做出更智能的决策。
劣势:为什么有人担心?
第一,深度和距离判断不稳定。
摄像头只能拍平面图像,要推断物体的距离和三维位置,全靠算法估算。在普通路况下,这也许没问题,但遇到强光、阴影、物体遮挡或远距离场景时,估算容易出错。激光雷达通过激光束直接测距,结果更精确可靠。
第二,受天气和光照影响大。
雨天、雾天、大雪或逆光条件下,摄像头画面可能模糊或过曝,导致识别能力下降。雷达传感器(如毫米波雷达)在恶劣天气中表现更稳定,因为它们不依赖光线工作。这是纯视觉方案的一个硬伤。

第三,复杂场景泛化能力有限。
纯视觉系统依赖大量训练数据,但现实世界路况千变万化,总有算法没见过的特殊情况。如果遇到极端或罕见组合场景,模型可能无法正确响应,带来安全风险。
第四,算力要求高,隐性成本不低。
处理高清图像并实时分析需要强大计算能力,这意味车载电脑可能更贵、更耗能。虽然摄像头硬件省钱,但为了保障性能,整体投入未必少。
结合先进制造业:技术路线的选择
在制造业领域,自动化和智能化是趋势。纯视觉方案低成本的特点,让它适合快速推广和量产,尤其在经济型车型中。但是,安全永远是第一位,缺乏冗余感知可能引发担忧。
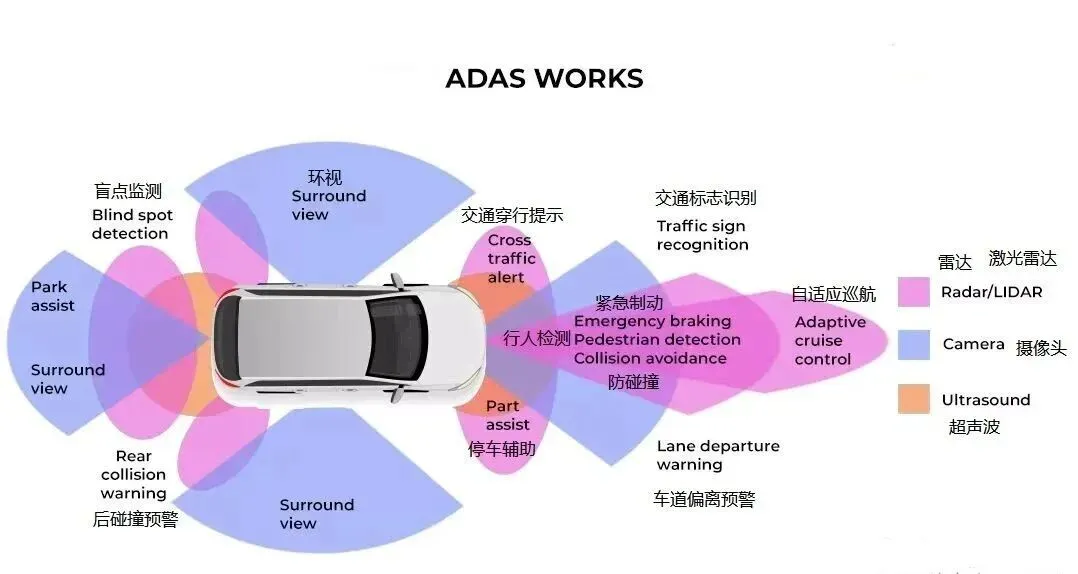
因此,现在很多车企选择“融合感知”路线,在摄像头基础上加入激光雷达、毫米波雷达等传感器。这样做既能利用图像的丰富语义,又能借助雷达的精确测距,提升系统在复杂环境下的可靠性。从制造角度看,这需要更精密的集成工艺,但也代表了技术上的平衡。
结尾:你的看法是什么?
纯视觉自动驾驶不是万能方案,但它推动着行业思考:如何在成本与安全之间找到平衡?它让我们看到,模仿人类视觉是一条有趣的路,但完全替代其他传感器,或许还为时过早。
技术的发展永远在迭代。也许未来,算法进步能让摄像头“看”得更准,或者新的廉价传感器会出现。但无论如何,安全驾驶的核心不会变。
那么,你觉得纯视觉自动驾驶能成为未来主流吗?还是说,多传感器融合才是必然选择?欢迎在评论区分享你的观点,我们一起聊聊!
公告:各位小主,由于网站www.amtbbs.org访问量越来越大,服务器负荷严重过载需要维护!我们需要引进外部资本扩大我们的运营规模;同时由于众所周知的原因我们需要逐步过渡到新域名:www.amtbbs.com;衷心感谢大家一直以来的厚爱和支持!------小艾
内容来源:网络
本期编辑:小艾
论文投稿:作为领先的高科技先进制造技术产业服务平台,AMT接受学术论文投稿;稿件的发布完全是公益和免费的;论文投稿邮箱:info@amtbbs.org
版权声明:AMT尊重版权并感谢每一位作者的辛苦付出与创作;除无法溯源的作品,我们均在文末备注了来源;如文章、视频、图片、文字涉及版权,请原创作者第一时间联系我们,我们将根据您提供的证明材料确认版权后立即删除内容或按国家规定标准支付稿酬!



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
