自动驾驶域控在环实验平台
平台的核心亮点如下:
1、内置各类定制化自动驾驶的全套算法,用户可以进行自动驾驶算法二次开发应用;
2、域控可以接入国产背景交通流二维仿真系统TESS AUTO, 测试不同机非混行二维面域场景下的自动驾驶算法决策,快速测试自动驾驶“规划决策”能力;
3、平台具有超1000+类案例场景库,并且可以通过TESS NG仿真软件快速自定义交互路网及交互对象,进行机动车/非机动车/行人等混行场景下的快速测试。
1.1 自动驾驶在复杂交通流下的测试需求
我国自动驾驶产业正迎来L3级有条件自动驾驶商业化落地的关键突破期,技术应用与产业协同迈入新阶段。2025年12月,工信部正式发放我国首批L3级自动驾驶车型准入许可,长安深蓝SL03、北汽极狐阿尔法S6两款车型成功获批,分别在重庆、北京的指定道路开启试点运行,最高车速分别适配50km/h城市拥堵场景和80km/h高速场景。其他企业也都摩拳擦掌,不断提升自身自动驾驶能力。
在自动驾驶技术规模化落地的进程中,自动驾驶虚拟仿真测试逐渐成为验证技术安全性、可靠性及协同效率的重要方法。域控制器作为自动驾驶车辆的大脑,可高精度模拟自动驾驶车辆的驾驶行为。
相较于传统实车测试,域控在环实验能够更高效地复现复杂交通场景下混合流车辆的交互行为,同时规避真实道路测试的高成本与高风险。
域控在环练习平台的必要性源于以下两点:
(1)测试场景的复杂性与安全性挑战:自动驾驶车辆需应对极端天气、突发障碍、密集车流等多样化场景,真实道路测试难以全面覆盖且存在安全隐患,而模拟实验可通过高精度仿真无限生成可控场景。
(2)技术迭代与协同优化的迫切需求:多车协同决策、车路协同(V2X)通信等技术的成熟度直接影响自动驾驶集群的可靠性,需通过大规模仿真快速验证算法性能,加速技术迭代。
因此,域控在环练习平台需要覆盖以下核心需求:
在算法研发层面,需要基于外部开源自动驾驶算法,支持调整各类算法参数并进行二次开发,实现算法间的实时通信。
在集群测试层面,需要能够构建多样化的测试场景;接入外部自动驾驶算法控制虚拟车辆,同时由TESS NG生成高密度强交互的仿真车流,实现AV与SV的双向交互;提供每次测试的高可信度评价结果。
1.2 前沿行业科研应用及各类竞赛需求
随着自动驾驶行业的火热发展,各类竞赛也层出不穷,包括同济大学主办的Onsite自动驾驶算法挑战赛、百度举办的百度Apollo星火自动驾驶大赛、中国国际智能产业博览会组委会主办的IVISTA智能网联汽车挑战赛等等,吸引了大量的自动驾驶行业的相关人员参加,共同推进自动驾驶的前沿探索。
1.3 系统业务流程及架构
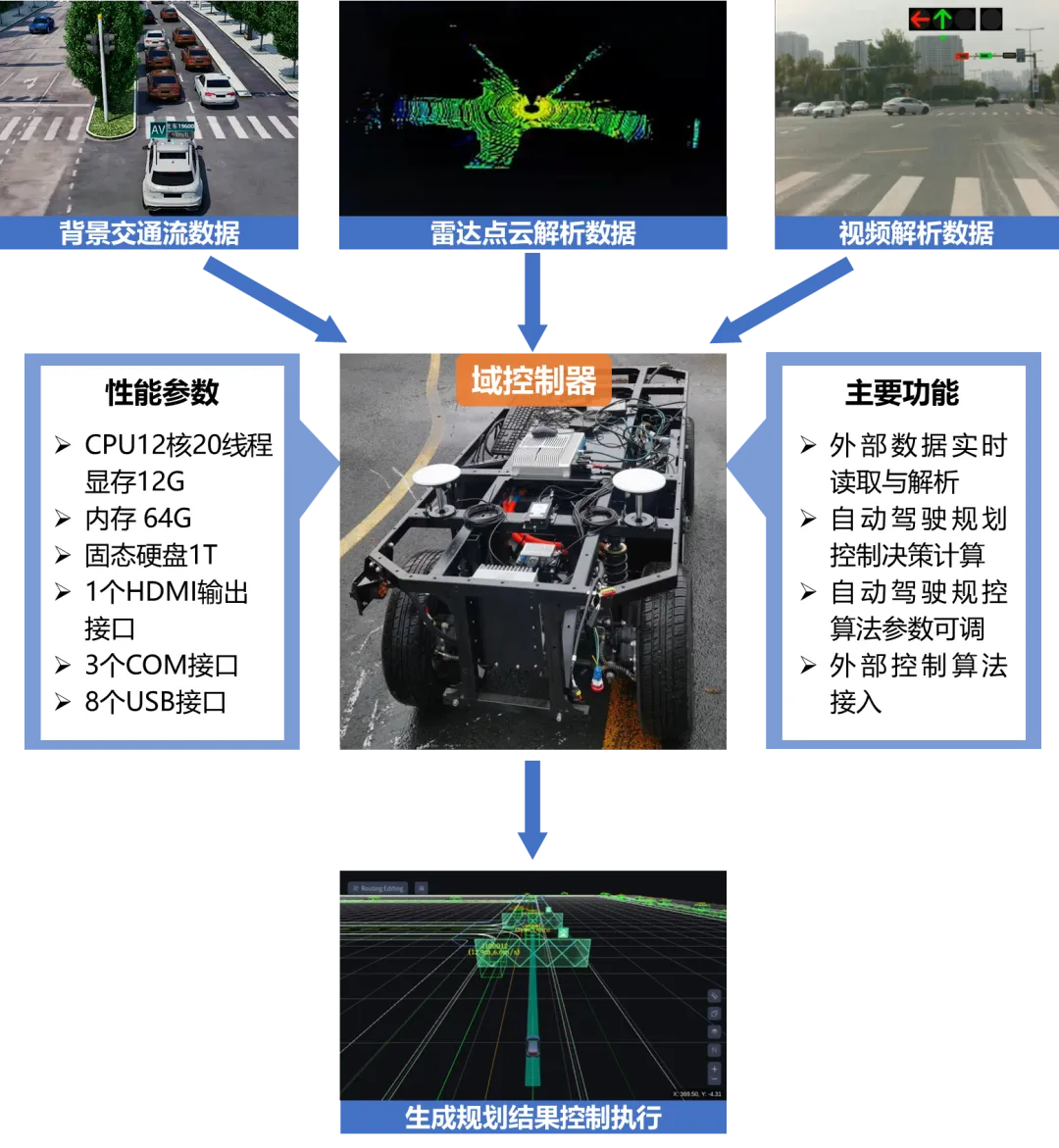
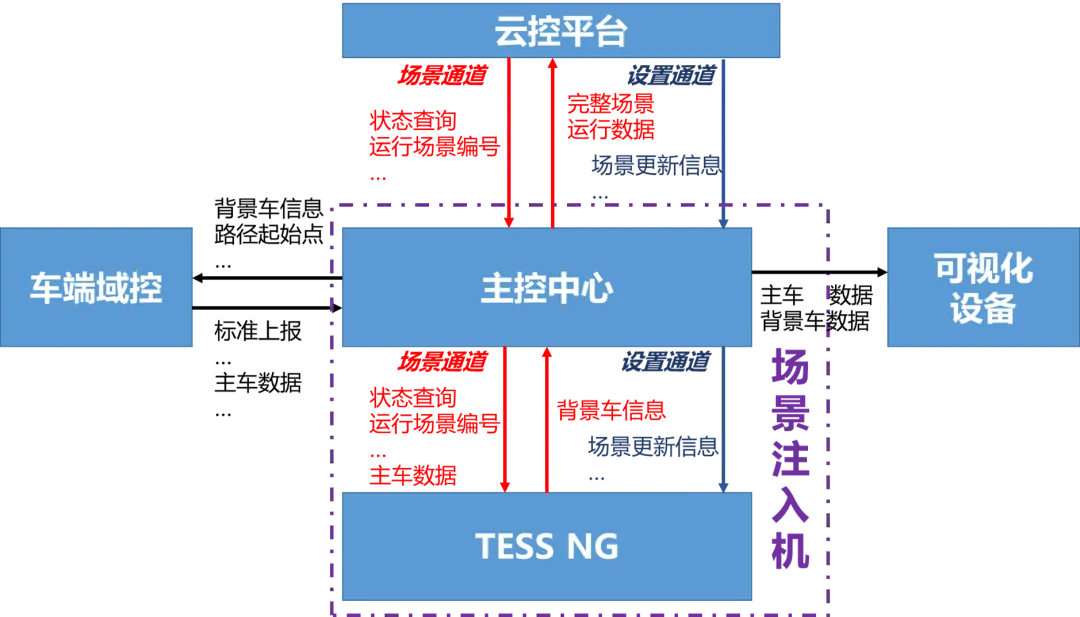
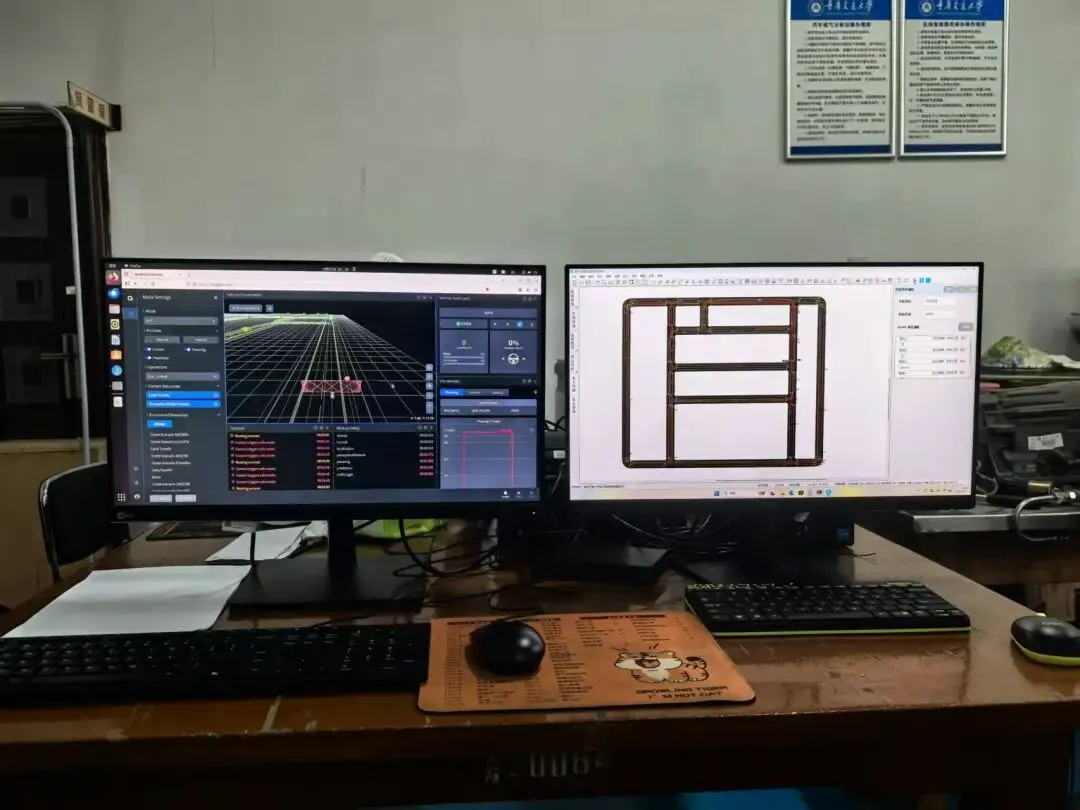
自动驾驶域控在环实验平台着眼于测试自动驾驶域控制器,将车辆的域控制器与虚拟仿真环境相连接,实时交互。在自动驾驶域控在环平台中,主要包含3个组件:
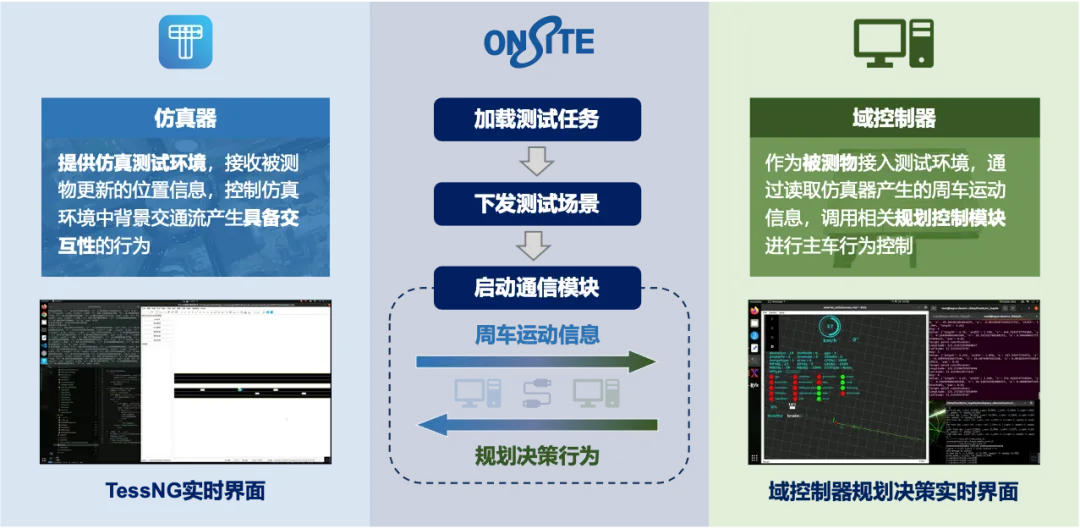
1. 仿真器(微观交通仿真软件),其用于提供仿真测试环境,接收被测物更新的位置信息,控制仿真环境中的背景交通流产生具备交互性的行为;
2. 自动驾驶域控制器,其作为被测物接入测试环境,通过读取仿真器产生的周车运动信息,调用相关规划控制模块进行主车行为控制;
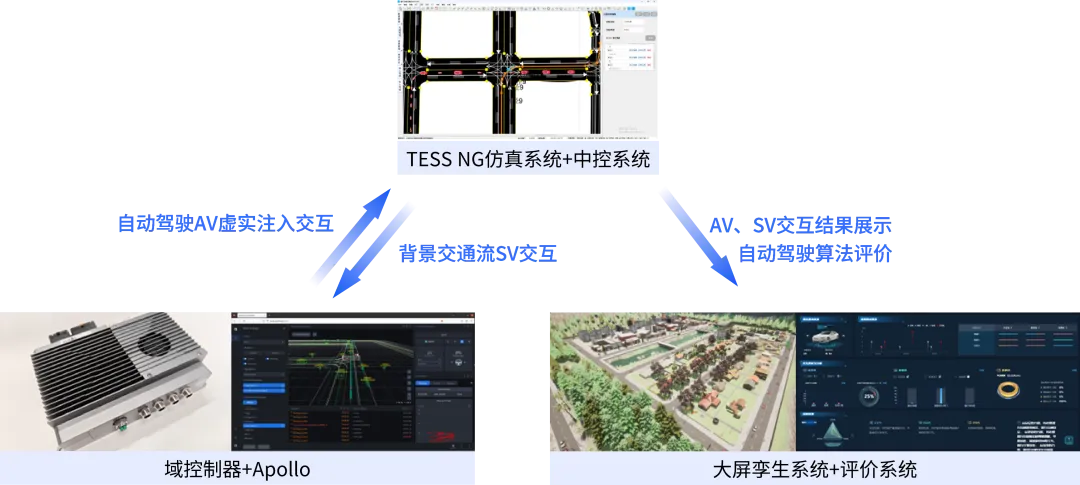
3. 中控系统,其作为场景信息的构建和存储模块,支持场景地图切换、主车路径设置、场景下发、仿真器与域控制器的数据交互等功能,当前集成到了TESS NG中。
仿真器和域控制器通过gRPC进行通信,在测试开始时,中控系统会分别向仿真器和域控制器下发测试场景相关信息,待场景加载完成后,通过中控向域控制器传输仿真器模拟的测试环境中的周车运动信息;域控制器则根据仿真器传输的车辆数据做出实时决策,模拟真实驾驶场景中自动驾驶系统的行为,并通过中控更新主车位置并回传给仿真器。这种闭环测试形式使得测试过程更贴近实际驾驶情境,从而更全面地评估系统的性能。同时,还允许对自动驾驶系统进行多样性和极端情况的测试,以确保其在各种复杂场景下的稳定性和安全性。
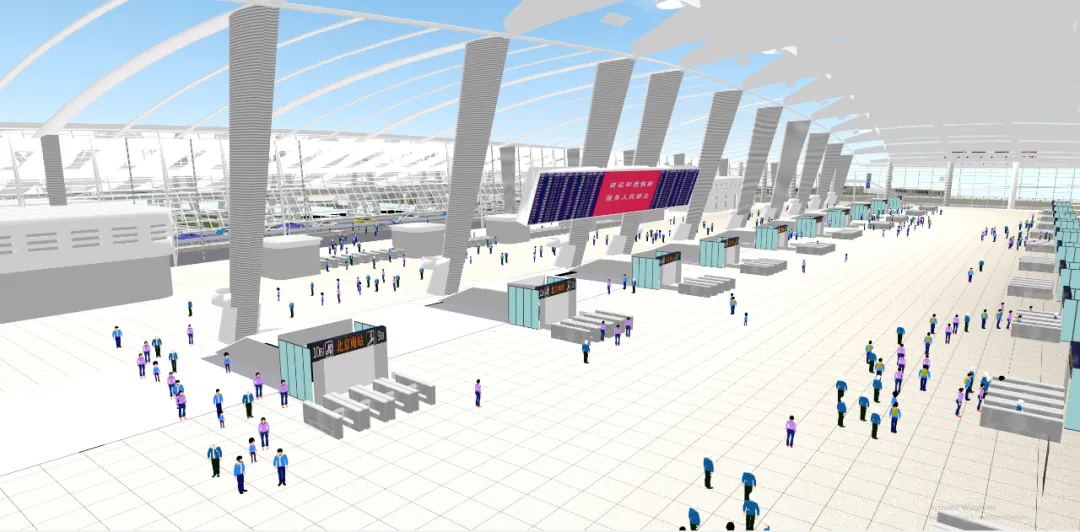
自动驾驶域控在环实验中,自动驾驶AV与背景交通流SV主要通过中控进行数据通信,中控系统将二者交互结果传输给大屏孪生系统进行展示,同时,将交互数据进行保存,用于自动驾驶算法评价。
2.1 自动驾驶场景库管理及场景编辑
2.1.1 实验平台场景库
自动驾驶域控在环实验平台,参考36个场景的标准规范,内置了10大类场景库,涵盖城市道路、高速公路、隧道、特殊交通组织等。场景主要来源自然驾驶场景数据,包括:国家智能网联汽车创新中心数据、TJRD TS数据、SIND数据集、上海自然驾驶数据集等等。可以满足各类场景测试需求。
2.1.2 手动绘制路网进行场景实验
自动驾驶域控在环实验平台支持将TESS NG手绘路网导出为Opendrive格式,并通过Apollo工具将其转换为自动驾驶车辆地图,车辆可在路网内行驶并进行实验。
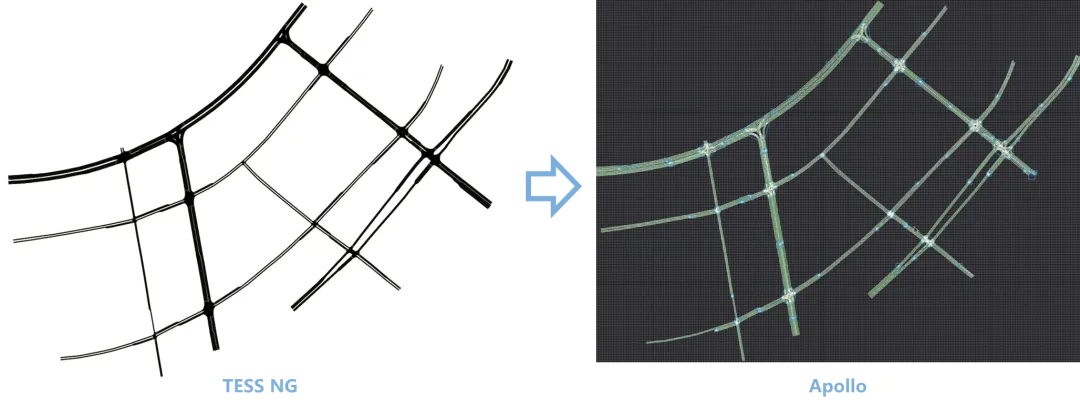
TESS NG转Apollo地图
TESS NG转Apollo地图
2.2 自动驾驶域控算法测试及开发
2.2.1 自动驾驶场景参数调整测试
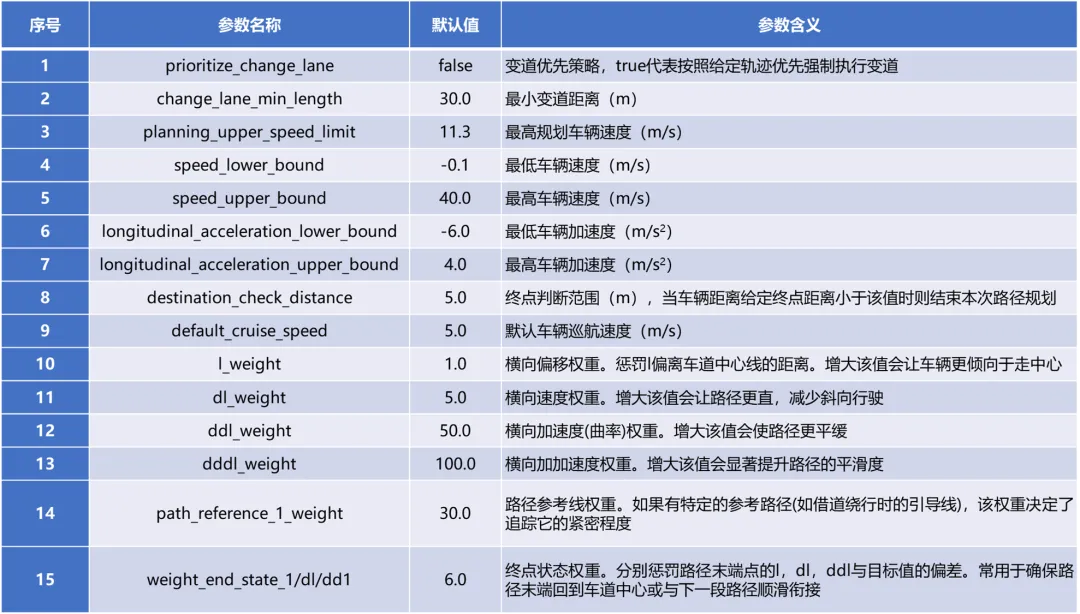
自动驾驶域控在环实验平台中的域控制器搭载了百度Apollo自动驾驶算法,该算法支持进行自动驾驶相关调整,用户可以通过调整参数来改变Apollo算法的决策特性和激进程度。本平台具备详细的参数调整操作说明,帮助用户快速上手。
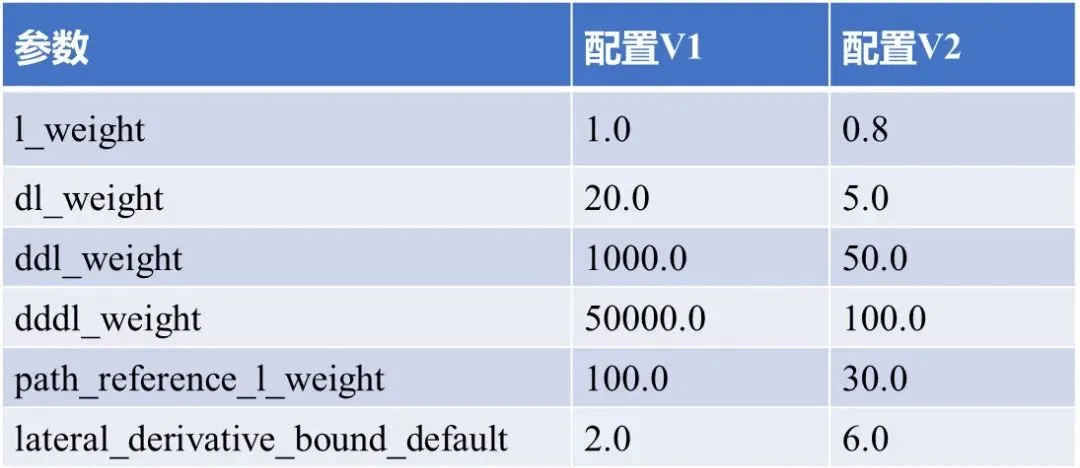
以换道行为为例,通过调整Apollo变道模型中的参数,实现换道距离、换道时机等换道决策行为的调整。
Apollo换道参数调整对比
从调整后的测试效果可以看出,V1参数配置下的AV车换道距离更长,换道行为更保守;V2参数配置下的AV车换道距离更短,换道行为更激进。
自动驾驶算法参数调整效果
2.2.2自动驾驶算法调整测试
自动驾驶域控在环实验平台还支持外部算法模型的接入,提升自动驾驶测试的可扩展性。本平台已经将外部算法模型接入的功能进行了单独封装,用户只需要将自己的模型按照标准化的接入模式接入,即可用外部模型控制AV车的行为。
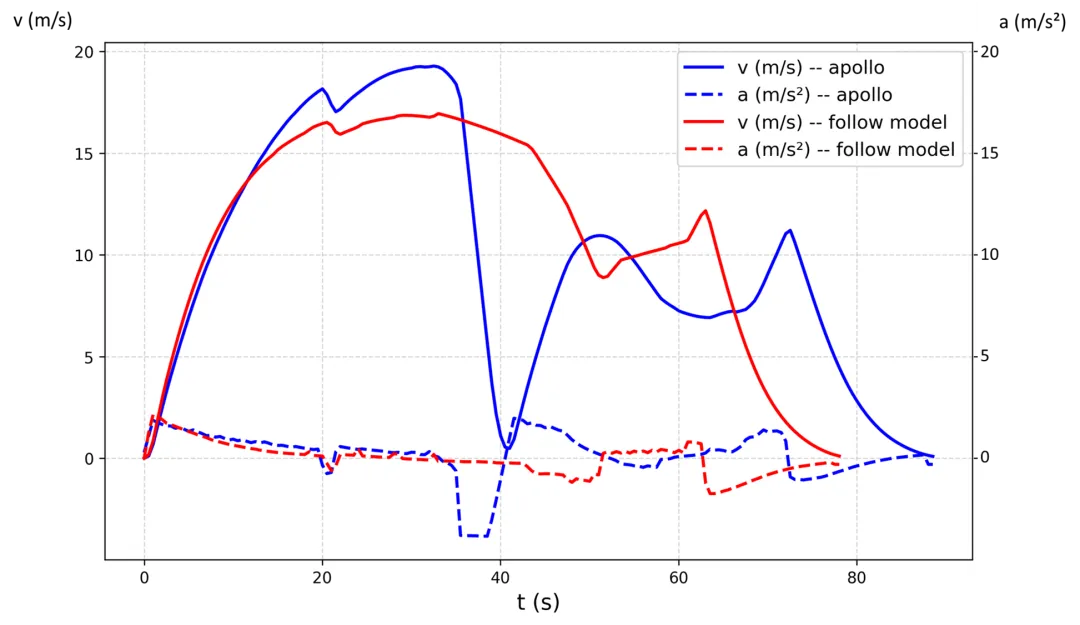
以IDM跟驰模型接入为例,接入IDM模型与Apollo默认模型之间AV车的行为差异较大。本实验平台也提供了相关的接口,便于用户接入传统的交通流模型。
自动驾驶算法接入对比效果
速度与加速度变化对比图
2.3 自动驾驶域控在环实验测试
2.3.1 自动驾驶背景仿真交通流测试
自动驾驶背景仿真交通流测试主要测试机动车之间的交互行为,通过TESS NG为AV车辆构建全机动车的交通流环境,在AV车行驶过程中对其造成干扰,测试AV车算法的适应能力,该测试可进行交叉口直行左转冲突、环岛汇入汇出、高速跟驰等场景测试。
机动车流测试效果
2.3.2 自动驾驶机非混行交通流测试
自动驾驶机非混行交通流测试主要为AV车辆构建一个机非混行的交通流环境,测试AV车辆对不同类型车辆行为的处理能力,同时可构建异常非机动车行为,如疯狂电瓶车、非机动车流溢出等场景,测试AV车算法对该类场景的适应能力。
机非混行车流测试效果
2.3.3自动驾驶行人流测试
行人作为弱势交通群体,是自动驾驶算法需要应对的难题之一,自动驾驶行人流测试主要针对行人过街、行人横穿马路等场景,测试自动驾驶算法在交规的礼让行人和与行人交互的决策时机等多方面的权衡与把握。
行人流测试效果
2.3.4 面向Onsite竞赛的自动驾驶算法测试
面向Onsite竞赛,平台具备标准化的通信模块,用户只需按照通信协议输出标准化的车辆状态信息,包括经纬度、速度、航向角、尺寸等。同时,基于通信模块获取标准化的背景交通流轨迹数据,进行自动驾驶算法的高效测试和快速迭代。
2.4 自动驾驶测试评价体系
2.4.1自动驾驶测试评价体系介绍
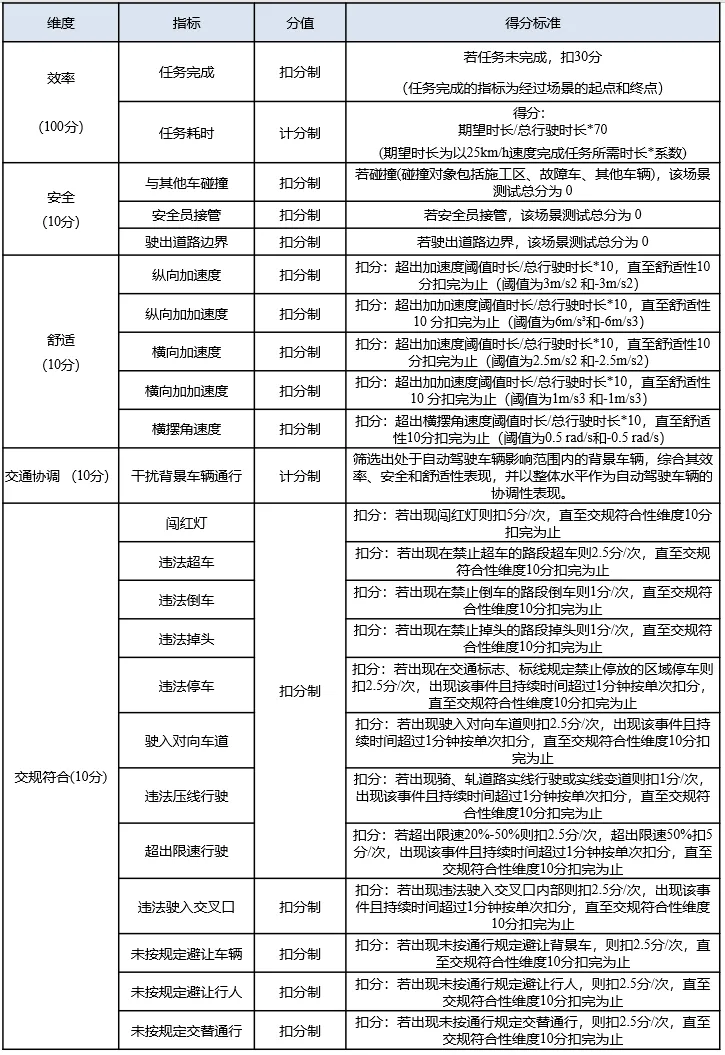
自动驾驶测试评价体系在安全、舒适、效率等传统单车运行评价维度上,引入系统侧的交通协调性和交规符合性评价维度,构建面向多部委产品认证需求的“算-测-诊”一体化测评体系。
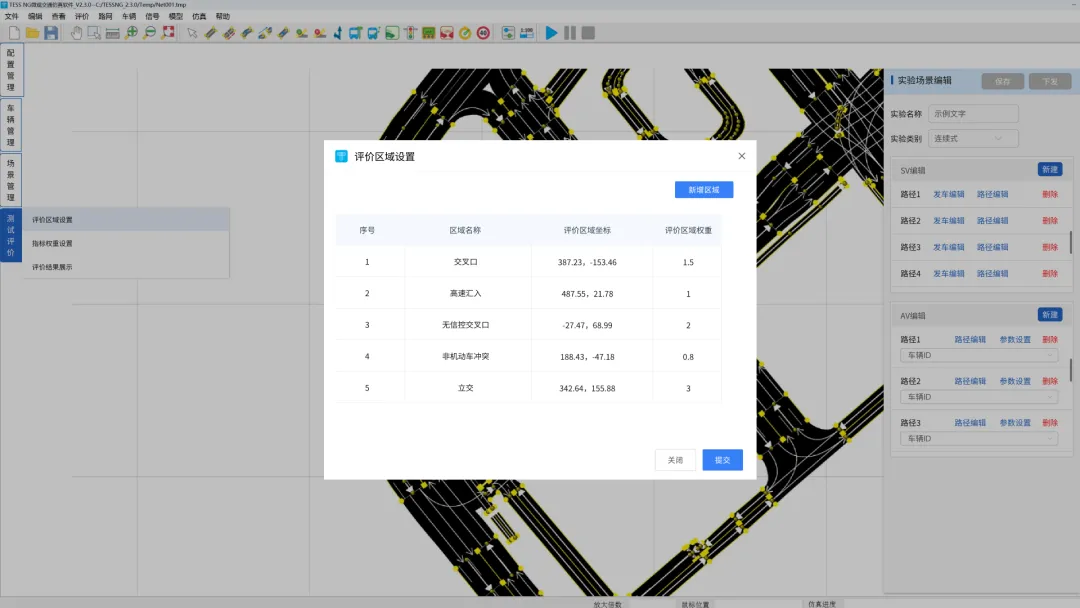
2.4.2 测试评价体系场景应用
测试评价主要用于对实验场景进行定制化评价。包括评价区域设置、指标权重设置和评价结果展示功能。支持用户通过框选的方式选择评价区域,用户可自定义各个区域的基本权重,灵活设置评价体系,测试结果支持网页端展示。
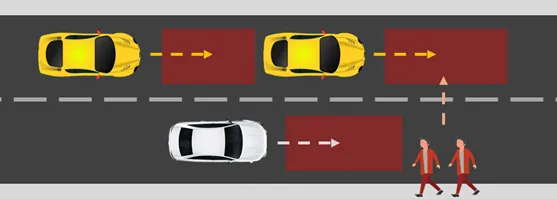
3.1 行人横穿场景
行人横穿场景主要是在AV车行驶过程中构建一组过街的行人流,测试AV车辆针对过街行人流的处理,即是否会礼让行人以及选择合适的穿越间隙。
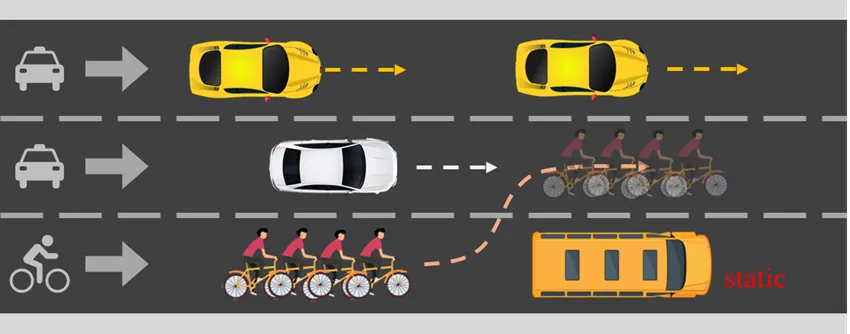
3.2 非机动车溢流场景
非机动车溢流场景主要模拟城市道路中常见的“电动车流因车道被占而突然并入机动车道”的情况。该场景可测试AV车辆面对突然换道到本车道的非机动车流是否能够做出及时的响应。
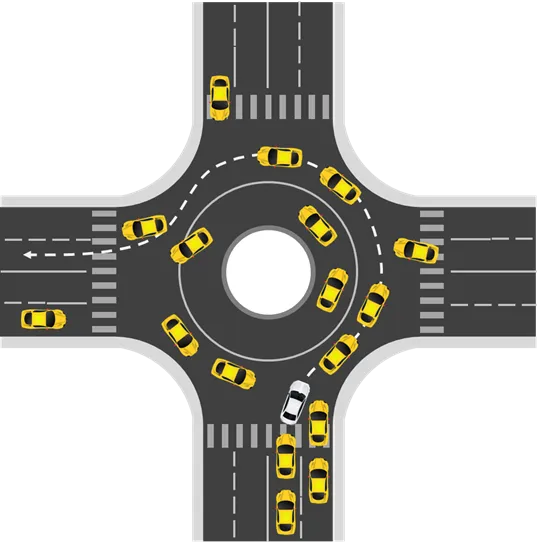
3.3 环岛通行场景
环岛通行场景主要模拟自动驾驶车辆进入、穿行和驶出环岛的全过程,自动驾驶车辆驶向环岛入口时,需根据交通规则礼让环岛内车辆,并在合适时机安全进入。进入环岛后,车辆需保持合理速度,避免与侧方或前方车辆发生冲突,并提前规划驶出路线。
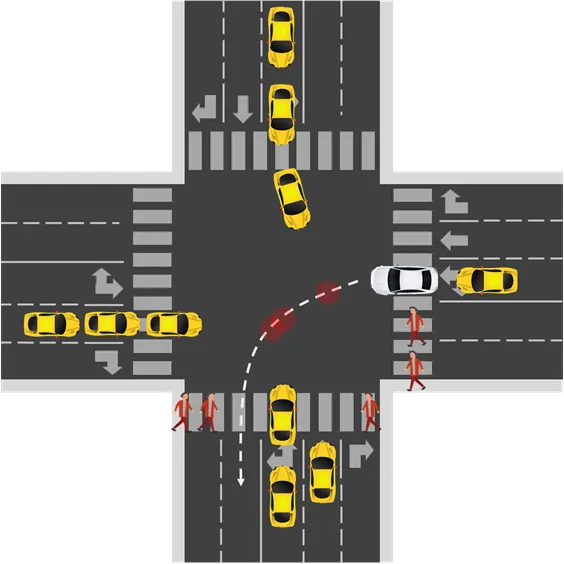
3.4 无信号交叉口通行场景
无信号交叉口通行场景主要模拟自动驾驶车辆在城市无信号交叉口通行的复杂情况。该场景可测试AV车针对多种冲突,是否能够进行智能决策,选择合适的可穿越间隙。
无信控交叉口通行场景示意图
无信控交叉口通行场景效果
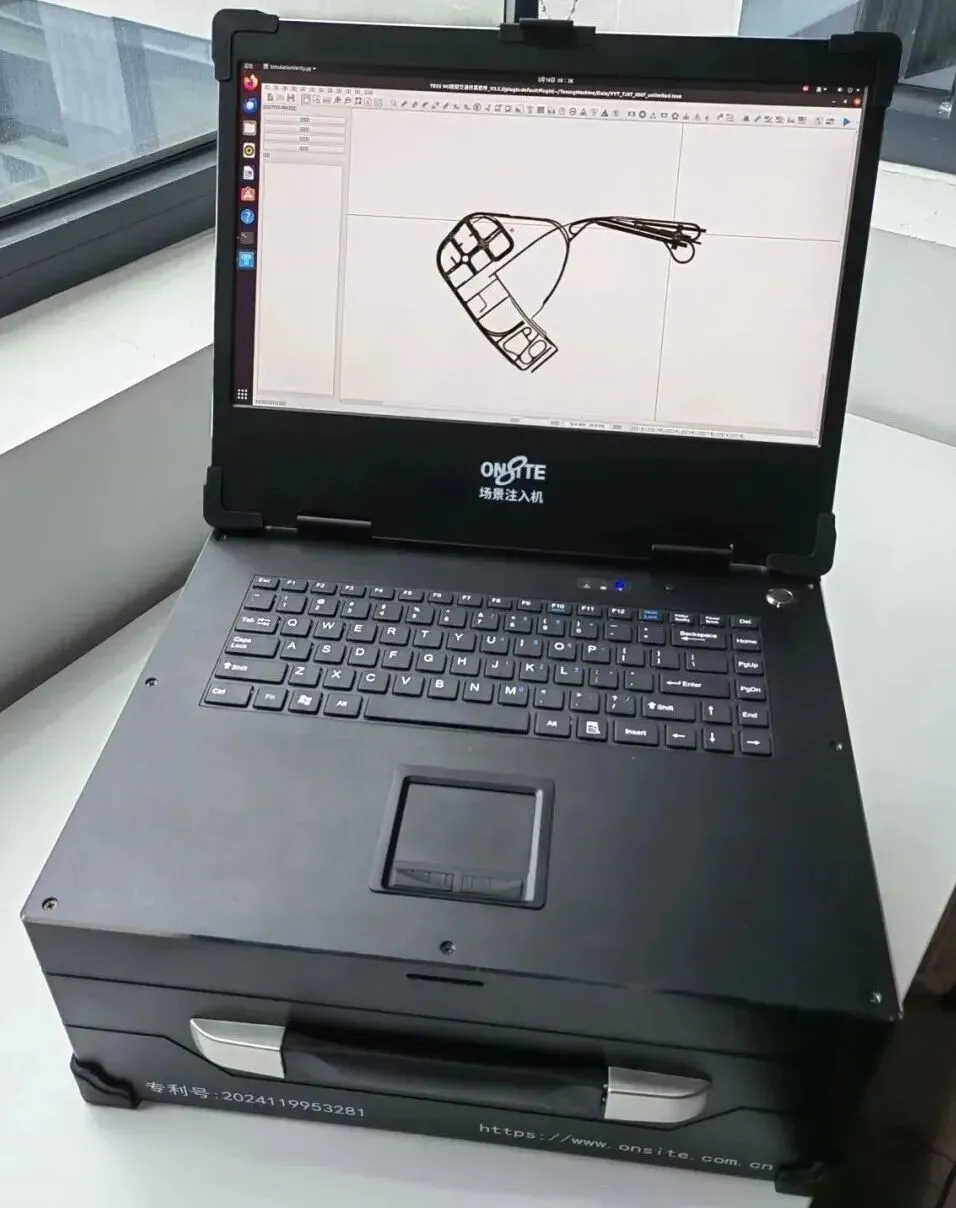
4.1场景注入机应用背景
在现实场地测试时,主车上传自车数据和接收虚拟背景车的数据均是通过无线网络传输,在实测过程中发现,无线网络传输波动较大,使得主车和背景车数据交互存在延迟,对主车的决策判断造成很大干扰,导致测试成功率低、交互准确性差。
针对网络延迟导致的上述问题,考虑将背景交通流生成服务由云端移植到车端,与车端进行有线直连,使得主车与背景车之间的交互无延迟,保证主车决策的准确性。我们将移植到车端的背景交通流生成服务的设备叫做场景注入机。通过场景注入机,可以保证主车决策的准确性,场景测试的成功率。
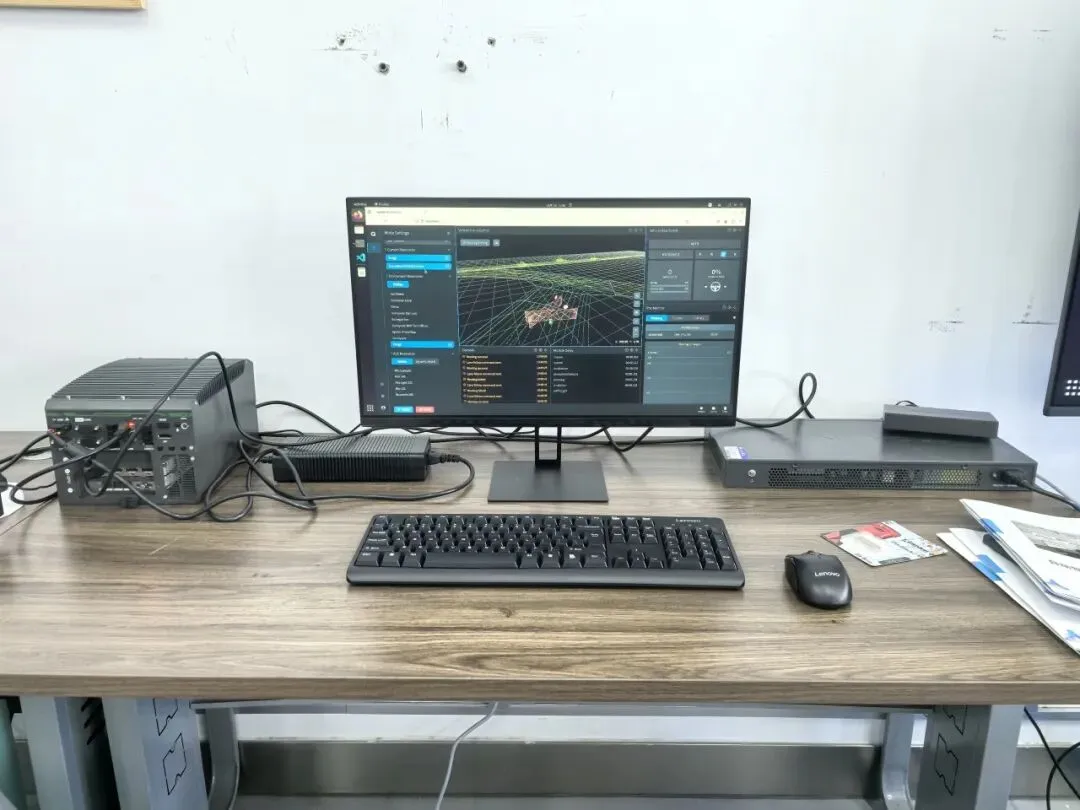
4.2 Onsite场景注入机应用效果演示
经验证,基于场景注入机进行实车虚实融合测试可有效解决主车与背景车交互延迟的问题,保证测试的有效性。该技术已应用到2025Onsite自动驾驶挑战赛联网联测实车赛中。
场景注入机应用效果
目前系统已经在全国诸多高校进行了应用,包括上海、福建、昆明、桂林、重庆、合肥等等,服务于高校教学、科研、竞赛等多项内容。
后续,济达交通将持续致力于交通仿真、数字孪生、自动驾驶等方向的高校实验室建设,服务于高校等单位的教学和科研,推进高校先进的自动驾驶研究平台建设,助力自动驾驶技术产学研协同创新与成果转化,培育更多智能交通领域高素质专业人才。