梳理至此,逻辑已经非常清晰:L3的落地催生了对“重运营”和“云监管”的迫切需求。
这意味着,在高阶自动驾驶阶段,车、网、云、路等是必备元素。
同时需要指出的是,单纯依靠单车智能,无法完全解决L3的所有痛点:
比如单车感知的盲区依然存在,这对安全性要求极高的自动驾驶来说无疑是致命的——一旦汽车遇到训练数据中未曾出现过的极端场景,系统就可能瞬间“失智”;
同时,在传统的单车智能逻辑里,每一辆车都是一个个体,在道路上进行着低效的博弈,整体运营效率不高;
而“车路云一体化”,则很好地解决了上述问题。
第一,在技术上,“车路云一体化”的“超视距感知”让车辆能更安全。
比如,在盲区交叉路口经常发生的“鬼探头”事故,以及自行车突然冲入人行横道引发的事故,仅靠单车难以规避。
基于“车路云一体化”,云端可及时从路端接收预警信息,提前向驾驶员或自动驾驶系统发出提醒,预留更充分的反应时间。
同时,在复杂的交通路口,“车路云一体化”能让车辆能更流畅和安全地行驶与并线。
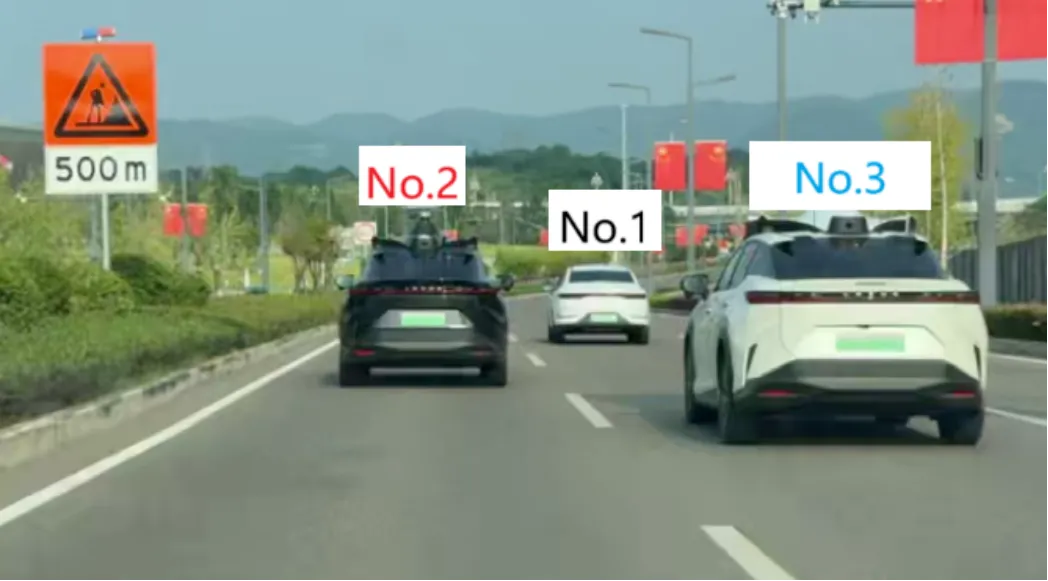
以今年10月在重庆进行的15家国内外主流车企的“车路云一体化中外车企一致行动”为例,来自一汽、东风、长安、丰田、广汽等不同厂商的车辆通过云端系统实现数据互通,在高速或快速路匝道汇入场景中,系统能够协调车辆进行协同配合。
“车路云一体化中外车企一致行动”多车协同的网联式车辆汇入合流场景
结果显示,无辅助状态下交通易出现混乱;而在汇入辅助系统的支持下,车辆可主动让出空间,实现安全、流畅的并线。
这种“超视距感知”能力,相当于给L3系统开了一个“全图挂”。它直接抹平了单车传感器在复杂交通环境、恶劣天气和遮挡环境下的物理缺陷,让L3级自动驾驶的安全性显著提升。
第二,在运营上,实现从“分散博弈”到“全局协同”的转变。
事实上,真实的驾驶过程并非单纯的个人意志体现,而是一个复杂的综合判断过程。
驾驶员时刻在宏观调控要求与具体路况之间寻求平衡,形成了一种“合题”关系。
这种合题包含两个核心要素:
一是车辆周围环境提供的实时策略建议;二是宏观规范性指令要求。
驾驶员既不能完全无视交通规则,也不能机械地执行规定而忽视实际路况,而必须在两者之间找到最优解。
进入AI机器人司机主导的自动驾驶时代,这种关系将发生重要变化。
由于运营平台需要承担更大责任和风险管控压力,宏观调控在决策合题中的权重必然显著增强。
而联网在线的技术特性使得系统级协调成为可能,个体车辆与总体系统的融合将更加紧密,多车协同和整体优化的趋势将更加明显。
从车权与路权,个体与整体上看,车路云的系统为这一矛盾的解决提供了新的途径和更高的整合水平——自动驾驶系统将在更复杂的层面上实现个体效率与整体优化的动态平衡。
由此可见,“车路云一体化”以全域信息共享和协同决策,实现单车智能无法企及的更高安全冗余、全要素交通效率和规模化商业落地。