Studying pedestrians’ crossing behavior when interacting with automated vehicles using virtual reality
利用虚拟现实研究行人与自动驾驶汽车互动时的过街行为
作者:J. Pablo Nunez Velasco, Haneen Farah, Bart van Arem, Marjan P. Hagenzieker
1.引言
自动驾驶汽车(AVs)被认为有望提升道路安全,但这一潜力的实现高度依赖于非自动化道路使用者(尤其是行人)与AVs的互动质量。在全球范围内,行人作为弱势道路使用者,其与机动车的碰撞事故在路口场景中尤为突出,而AVs无驾驶员的特性使得传统人车互动中的非语言沟通(如眼神交流、手势示意)难以延续,这一变化对行人过街决策的影响尚未明确。现有研究虽已尝试通过实地实验、动画模拟等方式探究行人与AVs的互动,但实地实验存在成本高、受天气与交通条件限制、伦理审查严格等问题,而普通动画等非沉浸式手段难以还原真实交通场景的沉浸感,导致研究结果的外部效度受限;同时,现有研究对车辆类型、车速、过街间距、斑马线存在与否及外部人机界面(eHMI)等因素的综合作用缺乏系统验证,且关于eHMI与车辆类型对行人过街意图的影响尚未形成一致结论。因此,本研究以55名普通公众为样本,采用360°视频虚拟现实(VR)技术开展重复测量实验,通过32种不同场景组合(涵盖车辆类型、车速、过街间距、斑马线存在与否、eHMI类型等变量),探究上述客观因素及信任度、感知行为控制等心理因素对行人过街意图的影响,同时验证360°视频VR方法在行人过街行为研究中的适用性,为AVs与行人的安全互动设计及城市场景商业化落地提供实证依据。
2.研究内容
本研究以55名普通公众为研究对象,采用360°视频虚拟现实(VR)重复测量实验设计,通过32种车辆类型(AV/CV)、车速(10km/h/20km/h)、过街间距(2s/4s,对应距离5.6m/11.1m/22.2m)、斑马线存在与否、eHMI类型(绿色标识/红色标识/无标识)的场景组合,探究上述客观因素及信任度、感知行为控制等心理因素对行人过街意图(是否过街)的影响,同时验证360°视频VR技术在行人过街行为研究中的适用性,为AVs与行人的安全互动及城市场景落地提供实证支撑。
3.研究方法
3.1参与者与实验设备
本研究共计邀请了55名有效参与者(32名男性,23名女性),年龄分布在21至37岁之间(均值24.9岁)。所有参与者均具备真实的道路使用经验,这确保了实验中所采集的风险判断数据具有极高的社会参考价值。
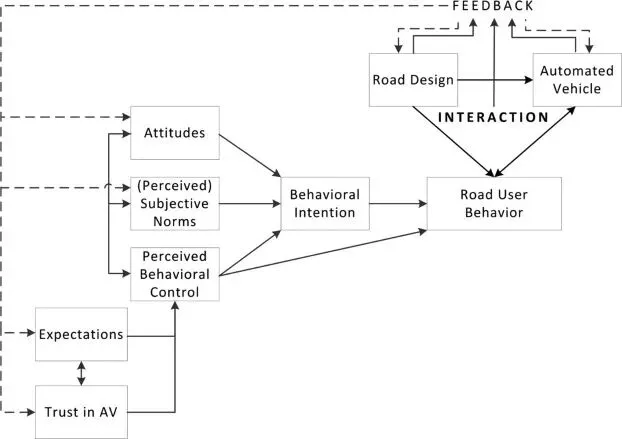
图1 虚拟实验环境概览
3.2实验设备与技术路径:从Unity建模转向实景录制
与常见的纯虚拟建模研究不同,本研究采用了一种更具现实感的“实景+合成”技术路径:
(1)显示硬件:参与者佩戴消费级头戴显示器,配合Samsung Galaxy S6手机 进行视觉呈现,利用手机内置的陀螺仪实现360°全景视觉追踪。
(2)环境构建:研究团队使用Nikon Keymission 360相机,在真实的城市路口录制了360°高清实景视频。相比Unity引擎渲染的虚拟世界,实景视频保留了真实的建筑纹理、光影变化和背景噪声。
(3)后期合成:研究中出现的两种自动驾驶车辆及其载有的eHMI信号,并非实时生成,而是通过Adobe Premiere Pro视频后期软件,精准地“粘贴”并合成到原始录像中的。这种方式保证了实验场景在视觉上的绝对真实感。

图2 实验中使用的两种自动驾驶车辆模型
3.3.场景设置
在每个场景中,车辆以30km/h的速度从右侧接近行人,并在距离行人15m处开始以2.2m/s的减速度制动(模拟让行),最终在距离行人3m处完全停止。eHMI 信号在车辆开始制动的同时(距离 15m)触发。这种设计剥离了运动学差异,确保所有变化仅由eHMI引起。
3.4实验变量与因变量测量
实验设计了2(车辆类型)×5(eHMI状态)×3(时间间隔)的全因子组合。
(1)eHMI 信号:包括绿色文字“WALK”、红色文字“DON'T WALK”、绿色符号、红色符号以及无信号(Off)五种状态,如图 3所示。
(2)意图决断(因变量一):与传统的量表不同,过街决策被记录为二分变量(Yes/No),即“在当前这种情况下,你会过马路吗?”
(3)心理感知(因变量二):在决策后,参与者需填写 7 点李克特量表,测量其对过街任务的感知行为控制(PBC)(例如:过马路对我来说是否容易)以及对车辆的信任度。
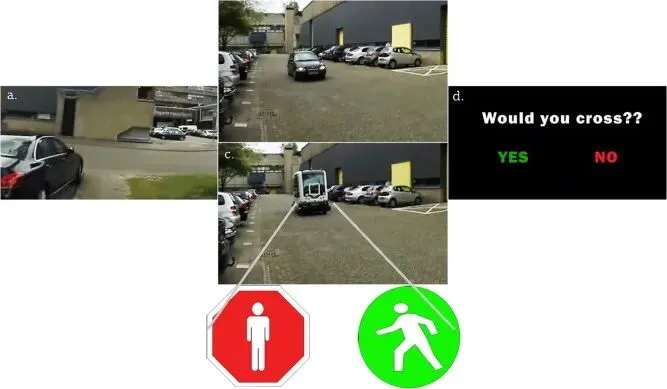
图3 五种不同的eHMI交互界面设计
4.研究结果
4.1行人过街意图及其心理驱动因子分析
研究发现,eHMI的显示状态对行人的过街决断具有绝对的主导作用。如表1所示,文本指令的表现全面优于颜色符号。
表1 各种eHMI信息模态下的行人决策与感知行为控制得分表
eHMI 信息模态 | 车辆类型 | 过街决策通过率 | 感知行为控制 | 核心发现 |
Walk (文本) | Pod | 95.20% | 6.72 | 最高效:明确文本彻底消除了语义模糊。 |
Car | 93.10% | 6.57 |
Green (颜色) | Pod | 89.10% | 6.34 | 高信任:但存在轻微的“对车还是对人”解读混淆。 |
Car | 87.80% | 6.2 |
Off (无信号) | Pod | 52.10% | 5.21 | 基准线:仅靠距离判断,行人伴随较高犹豫度。 |
Car | 52.30% | 5.23 |
Red (颜色) | Pod | 26.60% | 2.66 | 歧义区:部分行人误认为红色代表“车停我走”。 |
Car | 28.70% | 2.87 |
Don't Walk (文本) | Pod | 8.00% | 1.9 | 最强抑制:文本指令提供了最清晰的负面行为约束。 |
Car | 8.80% | 1.94 |
4.2 运动学感知悖论:速度vs空间距离
研究发现了一个极具反直觉意义的现象(见图4):在相同的时间间隔(Gap)下,行人在面对20km/h的高速车辆时,其过街意图反而比面对10 km/h的低速车辆时更强。
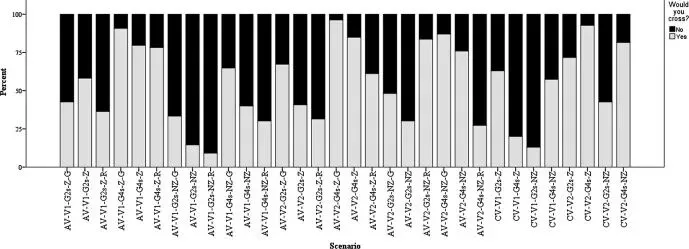
图4 行人过街决策与车速及时间间隔的相关性分析
4.3 显性信号对感知行为控制(PBC)的赋能机制
根据TPB模型,eHMI的引入本质上是提升了行人的感知行为控制(PBC)。
(1)去歧义性:相比于抽象的红绿颜色,文字“WALK”是以自我为中心的直接沟通。它直接告诉行人“你应该怎么做”,而不是让行人去推测“车辆现在的状态是什么”。
(2)信任建立:研究发现,即使车辆外观极具未来感(Pod车),如果没有eHMI,行人的不安全感依然很高。然而,一旦搭载有效的eHMI,Pod车的决策通过率甚至略高于传统车型,这表明公众对自动驾驶新技术的“新鲜感”与“警惕性”并存,且极度依赖显性信号的引导。
4.4 外部界面与物理外观的交互效应探讨
虽然eHMI的状态是决策的第一驱动力,但车辆类型也产生了微弱的调节作用。数据表明,未来型Pod车由于缺乏传统的挡风玻璃结构,行人对其行为的预判更为困难,因此Pod车搭载的信号在“禁止通行”时的威慑力较Car更强,而在“建议通行”时的吸引力也更高。这说明车辆形态越是背离传统,显性交互界面(eHMI)的补偿作用就越不可或缺。
5.结论
研究结果表明,行人在面对自动驾驶车辆(AV)与传统车辆(CV)时,其过街意图并未表现出显著差异。对自动驾驶技术了解和熟悉程度越高,行人对车辆自动化水平的信任度也相应越强。感知行为控制(PBC)与行人过街意图之间存在显著相关关系,且该关系不受车辆类型的影响。此外,本研究验证了基于智能手机和360°全景视频的虚拟现实(VR)技术在行人行为研究中的可行性与有效性。
6.参考文献
Juan Pablo Nuñez Velasco, Haneen Farah, Bart van Arem, Marjan P. Hagenzieker (2019). “Studying pedestrians’ crossing behavior when interacting with automated vehicles using virtual reality” Transportation Research Part F 66 (2019) 1–14.
7.点评
这篇论文的精妙之处在于它不仅是一场技术实验,更是一场严谨的心理学实证。研究者没有选择在纯虚构的Unity世界里“闭门造车”,而是通过360°实景视频捕捉了现实交通的复杂性,这种对生态效度的追求使得结论极具说服力。特别是关于“车速与距离”的反直觉发现,深刻揭示了人类在面对交通冲突时的启发式判断逻辑——我们往往是“看距离”而非“算速度”。此外,研究将eHMI的设计上升到计划行为理论(TPB)的高度,证明了交互界面不仅仅是为了传递信息,更是为了给行人提供一种“我能安全掌控过街过程”的心理赋能(PBC)。这种从人因工程向行为心理学的跨界探索,为未来智慧城市中自动驾驶车辆的社会化集成提供了极其宝贵的底层逻辑支撑。尽管智能手机VR方案在交互深度上略逊于高端头显,但其大样本的实测结论无疑为eHMI的全球标准化铺平了道路。注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
