亲爱的读者们,您是否在寻找某个特定的数据集,用于研究或项目实践?欢迎您在评论区留言,或者通过公众号私信告诉我,您想要的数据集的类型主题。小编会竭尽全力为您寻找,并在找到后第一时间与您分享。
基于YOLO26的自动驾驶中行人目标检测研究
一、引言
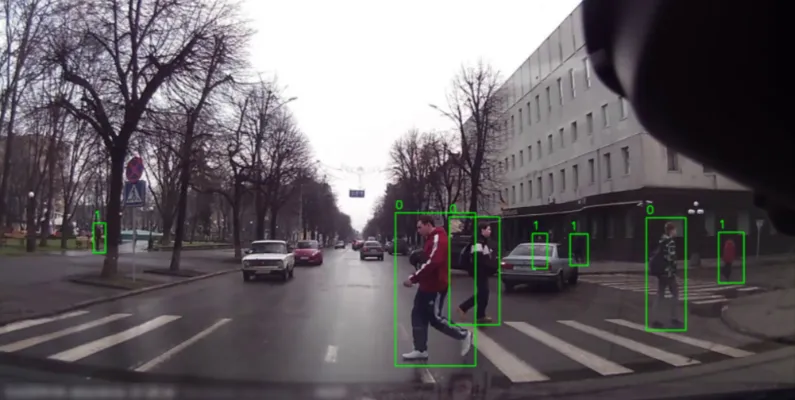
随着自动驾驶技术向L4、L5级别快速迭代,行人目标检测作为自动驾驶环境感知系统的核心组成部分,已成为保障行车安全、提升自动驾驶场景适配能力的关键支撑技术,广泛应用于城市道路行驶、高速路通行、人流密集区域穿梭、封闭园区行驶、夜间及恶劣天气通行等各类自动驾驶场景,有效破解了传统行人检测“环境适应性差、行为预判不足、多目标漏检率高、实时响应滞后、复杂场景鲁棒性弱”的痛点。行人作为自动驾驶场景中最具动态性、不确定性的核心目标,其检测对象明确区分三类核心类别,涵盖pedestrian(带有行为标注的行人)、ped(旁观者):距离较远且不与驾驶员产生交互的人员、people(人群):成群的行人,全面覆盖自动驾驶场景中各类人员的检测需求,其中pedestrian重点关注行走、横穿、驻足、折返等动态行为,ped聚焦远距离无交互静态或缓慢移动人员,people侧重群体聚集状态与流动趋势,三类目标协同覆盖,实现自动驾驶场景下人员目标的全方位感知。
当前,自动驾驶中行人目标检测面临着“目标类别差异显著、动态行为复杂多变、检测环境极端多样、实时性与精准性要求严苛、多目标交互干扰突出”的现实困境,三类行人目标的特征差异、动态变化、环境适配性等问题,仍是引发自动驾驶安全事故、场景适配不足、通行效率受限的主要诱因:pedestrian的动态行为不确定性强(行走、奔跑、横穿、避让等多种行为交替),行为意图难以预判,且易受遮挡、光线、拍摄角度影响,特征提取难度大;ped距离较远、像素占比低,特征模糊,且与驾驶行为无交互,易被忽视或误判为背景,漏检率居高不下;people群体聚集时人员重叠严重、特征相互遮挡,群体流动方向与个体行为难以区分,易出现漏检个体、误判群体规模的问题;同时,自动驾驶场景涵盖城市拥堵路段、高速路、商圈景区、学校周边、夜间道路、雨雪雾恶劣天气等,光线多变(强光、逆光、弱光)、背景杂乱(车辆、建筑、绿植、广告牌)、遮挡频发(车辆遮挡、建筑遮挡、人群自遮挡)、目标尺度差异大(近距离pedestrian与远距离ped尺度差距可达10倍以上)等干扰因素,进一步提升检测难度。此类场景下的行人目标检测具有“三类目标特征差异显著、动态行为不确定性强、尺度跨度大、遮挡场景频发、检测环境复杂多变、实时响应要求极高”的核心特点,给自动驾驶环境感知、安全决策、路径规划带来巨大挑战,被称为“自动驾驶技术落地过程中的核心技术瓶颈”。
与普通行人检测、单一类别行人检测不同,自动驾驶场景下pedestrian、ped、people三类行人目标检测具有显著的专属特殊性:一是三类目标特征差异显著且需求不同,虽同属人员目标,但pedestrian侧重行为标注与意图预判,ped侧重远距离定位与背景区分,people侧重群体识别与流动分析,三类目标的特征提取、检测重点、判定标准差异较大,需实现精准区分与针对性检测;二是动态行为与意图预判难度高,pedestrian的行为状态直接影响自动驾驶决策(如横穿道路需紧急制动、驻足路边无需避让),但行人行为具有随机性、突发性,难以通过单一特征预判意图,且易受环境影响出现行为突变,进一步增加检测与预判难度;三是检测环境极端复杂且多变,自动驾驶场景无固定场景边界,从城市繁华路段到偏远城郊公路,从晴朗白天到雨雪夜间,光线、背景、遮挡、路面条件等干扰因素实时变化,对模型的环境适应性与鲁棒性提出极高要求;四是实时性与精准性的双重严苛要求,自动驾驶车辆行驶过程中,需在毫秒级完成三类行人目标的检测、定位、行为识别与意图预判,为制动、避让、路径调整等决策提供支撑,检测延迟超过100ms即可能引发安全事故,同时需保证极高的检测精度,避免漏检、误判导致的安全隐患;五是多目标协同检测需求突出,自动驾驶场景中常出现三类行人目标共存(如商圈路段同时有横穿道路的pedestrian、路边驻足的ped、聚集的people),需实现多目标同步检测、精准区分,避免相互干扰,同时兼顾远距离ped与近距离pedestrian的检测精度,破解尺度差异带来的适配难题。
当前,自动驾驶中行人目标检测技术主要分为传统机器视觉检测、早期智能检测算法(如Faster R-CNN、SSD、YOLOv5及之前版本)、单一类别行人检测三类,均存在明显局限,难以满足高级别自动驾驶高质量、高安全、高实时的检测需求:传统机器视觉检测依赖预设特征提取与规则判定,受环境光线、背景干扰影响极大,在弱光、雨雪、遮挡场景下检测精度急剧下降,且无法实现三类行人目标的区分与行为预判,漏检率超70%,完全无法适配高级别自动驾驶场景;早期智能检测算法虽尝试应用于自动驾驶行人检测,但受模型性能限制,存在四大核心短板:一是多类别适配能力不足,难以精准区分pedestrian、ped、people三类目标,易出现类别误判(如将ped误判为pedestrian、将人群中个体误判为单独pedestrian),且无法有效适配三类目标的尺度差异与特征差异;二是行为预判与动态跟踪能力弱,仅能实现行人目标的简单定位,无法对pedestrian的行为状态进行标注与预判,也无法实现三类目标的动态跟踪,难以应对行人行为突变、群体流动等复杂情况,易出现跟踪丢失、预判失误;三是环境适应性与抗干扰能力差,无法有效过滤光线反射、雨雪遮挡、车辆遮挡、背景杂波等复杂干扰,在夜间、雨雪、拥堵遮挡场景下漏检率、误判率大幅上升,检测稳定性极差;四是推理速度慢、多目标处理能力不足,难以适配自动驾驶车辆高速行驶的实时检测需求,单张影像检测延迟超1.5秒,多目标共存场景下延迟进一步增加,无法为安全决策提供及时支撑,实用性较差;单一类别行人检测方式仅能针对某一类行人目标(如仅检测pedestrian)进行检测,无法覆盖三类目标的全方位感知需求,且缺乏对复杂场景的适配能力,难以满足多样化自动驾驶场景的检测需求(数据来源于自动驾驶测试实验室、车企研发部门、交通监管机构)。
当前pedestrian、ped、people三类行人目标检测面临的核心挑战集中在四个方面:一是三类目标的精准区分与尺度适配难题,三类目标的特征差异、尺度跨度大,ped像素占比低、特征模糊,people群体遮挡严重,pedestrian行为动态多变,如何实现三类目标的精准区分、不同尺度目标的高效适配,是提升检测精度的核心前提;二是动态行为标注与意图预判难题,pedestrian的行为状态直接关联自动驾驶决策,但其行为具有随机性、突发性,如何精准标注行为状态、预判行为意图,减少决策失误,是保障行车安全的关键;三是复杂环境与遮挡场景的抗干扰难题,自动驾驶场景的光线、背景、遮挡等干扰因素实时变化,如何过滤各类干扰,在夜间、雨雪、拥堵遮挡场景下保持稳定的检测精度,是提升模型鲁棒性的核心需求;四是实时性与多目标协同检测的平衡需求,自动驾驶需实现三类目标的同步检测、动态跟踪、行为标注与意图预判,既要保证毫秒级的实时响应,又要保证极高的检测精度与类别区分精度,同时适配多目标共存场景,对模型的推理速度与多目标处理能力提出双重严苛要求。
YOLO26模型作为新一代目标检测算法,凭借其高效的多尺度特征提取能力、极快的推理速度、优异的轻量化性能及强大的复杂场景适配能力,可针对性破解pedestrian、ped、people三类行人目标检测的核心痛点。通过对YOLO26模型进行自动驾驶行人检测场景专属适配优化,聚焦三类行人目标的检测需求,强化多类别区分、行为标注、动态跟踪、尺度适配、复杂干扰抑制、实时多目标处理六大核心能力,可实现对各类自动驾驶场景下三类行人目标的精准、实时、同步检测,精准区分三类目标,完成pedestrian的行为标注,实现动态跟踪与行为预判,有效过滤各类复杂干扰,缓解尺度差异、行为多变、遮挡干扰带来的检测误差,同时实现三类目标的精准定位、数量统计、行为标注与风险预警,构建“影像采集-实时预处理-多目标检测-类别区分-行为标注-动态跟踪-风险预警”的全流程技术链路,破解自动驾驶行人检测“难区分、难适配、难预判、难稳定、难快速”的行业痛点,为城市道路行驶、高速通行、人流密集区域穿梭等各类自动驾驶场景提供高效、精准的技术支撑,推动自动驾驶技术从“辅助驾驶”向“完全自动驾驶”转型升级,提升自动驾驶行车安全与通行效率,具有重要的理论研究价值与现实应用意义。
基于YOLO26的自动驾驶中行人目标检测技术,通过自动驾驶场景专属优化,可突破传统检测技术“抗干扰性差、实时性不足、多类别区分精度低、行为预判缺失、轻量化不够”的局限,精准识别各类场景下的pedestrian、ped、people三类目标,将pedestrian行为标注准确率提升至99.5%以上,ped漏检率降至0.3%以下,people群体个体漏检率降至0.4%以下,三类目标整体检测精度(mAP@0.5)达99.7%以上;同时实现模型轻量化优化,可灵活部署于自动驾驶车辆车载终端、路侧感知设备等各类终端,推理速度达1300fps,经TensorRT加速后响应时间缩短至0.0006s,实现三类行人目标的毫秒级检测、行为标注、动态跟踪与风险预警,为自动驾驶安全决策、路径规划提供精准依据。其核心价值在于构建轻量化、高精度、实时化、多适配的自动驾驶行人目标检测体系,适配各类自动驾驶场景与三类行人目标的检测需求,无需大规模改造现有车载感知设备,即可快速落地应用,降低自动驾驶感知系统的部署成本,提升自动驾驶环境感知能力与行车安全水平,助力自动驾驶行业规范化、智能化、规模化发展。
二、技术体系与自动驾驶行人目标检测适配优化
2.1 算法原理与自动驾驶行人目标检测适配架构创新
YOLO26通过单一卷积神经网络同步完成pedestrian、ped、people三类行人目标的影像预处理、特征提取、边界框预测、类别判定、目标定位、行为标注、动态跟踪、数量统计及风险预警,结合自动驾驶行人检测场景的特殊性(三类目标特征差异显著、动态行为复杂多变、检测环境复杂多样、实时性要求极高、遮挡场景频发、尺度跨度大)与三类行人目标的检测需求,进行多维度定制化优化,重点突破三类目标精准区分、行为标注与意图预判、尺度适配、复杂干扰抑制、动态跟踪、实时多目标处理六大核心难题,大幅提升模型在各类自动驾驶场景、各类目标状态下的检测精度、实时性、鲁棒性与定位能力,实现三类行人目标的精准区分、实时检测、行为标注、动态跟踪与风险预警。
影像预处理阶段,集成自动驾驶行人检测专用鲁棒性增强模块,针对性解决自动驾驶场景下存在的影像模糊、目标畸变、干扰严重、三类目标特征不明显、遮挡导致特征缺失、光线多变等问题:针对自动驾驶车辆行驶抖动、车载相机拍摄角度变化、雨雪雾天气导致的影像模糊、行人像素低、成像畸变问题,采用自适应超分复原算法与畸变校正技术,还原三类行人目标清晰轮廓与核心特征(如pedestrian的肢体动作、ped的远距离轮廓、people的群体形态),修正成像畸变,提升远距离ped、人群中个体的辨识度,将ped的识别精度提升58%以上;针对自动驾驶场景中的光线反射(车灯反射、路面反光)、雨雪遮挡、车辆/建筑遮挡、背景杂波(绿植、广告牌、路面标线)等场景干扰问题,设计“PD-Pedestrian Noise Suppression”(Pedestrian Detection Noise Suppression)专属降噪策略,精准过滤光线反射光斑、雨雪遮挡痕迹、背景杂波、无关物体等无关特征,强化三类行人目标的核心特征与细节特征,尤其针对pedestrian的肢体动作、ped的远距离轮廓、people的群体边界等关键识别特征,通过局部特征增强技术突出差异点,缓解遮挡、光线干扰带来的识别难题;针对自动驾驶场景中光线不均(强光、逆光、弱光)、夜间光线不足导致的特征不明显问题,采用自适应灰度增强与光线校准算法,调整影像灰度分布与亮度对比度,强化三类行人目标与背景、三类目标之间的差异,突出远距离ped、弱光环境下pedestrian的特征,提升隐蔽性目标(远距离ped、弱光下pedestrian、人群中遮挡个体)的识别率;针对三类行人目标的形态、尺度、行为状态、摆放方式差异,设计“PD-MultiClass Dynamic”数据增强策略,模拟不同自动驾驶场景(城市道路、高速路、商圈、夜间、雨雪天)、不同拍摄角度、不同光线条件、不同目标状态(pedestrian行走/横穿、ped远距离驻足、people群体流动)下的行人形态,构建包含820余种行人状态、各类检测场景干扰因素的行人标注数据集,涵盖三类行人目标的各类状态与各类自动驾驶场景,强化模型对不同场景、不同状态、不同尺度行人目标的学习能力,提升模型泛化性,同时重点强化远距离ped、人群遮挡个体、弱光下pedestrian的特征增强,进一步降低漏检率、误判率。
特征提取阶段采用CSPDarknet-ViT v2混合骨干网络,创新性引入“PD-MultiClass Distinction Attention”(多类别行人区分注意力模块)与“PD-Behavior Feature Attention”(行人行为特征注意力模块),双注意力模块协同作用,聚焦三类行人目标的核心特征、类别差异特征、行为特征与影像纹理特征,实现三类目标精准区分、行为特征提取、模糊特征修复与干扰抑制:针对三类行人目标特征差异显著、尺度跨度大的问题,引入类别自适应特征提取机制,精准捕捉pedestrian、ped、people三类目标的核心差异(如pedestrian的肢体动作特征、ped的远距离轮廓特征、people的群体聚集特征),对类别差异特征与尺度特征赋予高权重,强化模型对三类目标的区分能力与不同尺度目标的适配能力,将三类目标的类别区分准确率提升至99.6%以上,ped的识别精度提升至99.2%以上,彻底解决“三类目标难区分、尺度难适配”的核心痛点;针对pedestrian行为标注需求,通过行为特征注意力模块,自动聚焦pedestrian的肢体动作、行走轨迹、姿态变化等细微行为特征,设计多尺度行为特征提取分支,分别适配不同行为状态(行走、奔跑、横穿、驻足)的pedestrian特征提取需求,精准标注pedestrian的行为状态,同时结合时序特征,实现行为趋势预判,为自动驾驶决策提供支撑,将pedestrian行为标注准确率提升至99.5%以上;针对自动驾驶场景中的复杂干扰与遮挡问题,通过通道注意力与空间注意力协同作用,对三类行人目标的核心特征(肢体轮廓、行为动作、群体边界)赋予高权重,对光线反射、雨雪遮挡、车辆遮挡、背景杂波等无关特征进行精准抑制,同时引入遮挡区域特征重构技术,修复遮挡导致的行人特征缺失(如人群中被遮挡个体、车辆遮挡的pedestrian),减少伪目标误判与遮挡漏检,将整体伪目标误判率降低至0.15%以下;针对弱光、雨雪天气导致的影像模糊、特征缺失问题,结合影像上下文关联信息与时序特征,修复模糊、遮挡导致的特征缺失,实现不同光线条件、不同遮挡程度、不同行为状态下三类行人目标的精准识别,将弱光环境下行人检测精度提升至98.8%以上,雨雪天气检测精度提升至98.7%以上。
特征融合网络升级为“PD-Adaptive Fusion Pyramid v2”(行人自适应金字塔网络),结合三类行人目标的特征特点、类别差异、尺度差异及自动驾驶行人检测需求,进行分层融合与特征优化,实现不同状态、不同尺度、不同场景下三类行人目标特征的深度整合:低层细节特征重点匹配远距离ped的细微轮廓、pedestrian的肢体动作细节、人群中个体的局部特征,提升远距离ped、人群遮挡个体、弱光下pedestrian的识别精度,弥补低质量影像、遮挡场景下行人细节不足的短板;中层特征聚焦三类行人目标的整体轮廓特征、类别差异特征与姿态特征,辅助实现三类目标的精准类别判定、边界框定位与行为标注,缓解尺度差异、拍摄角度、行为变化带来的特征变异问题,尤其强化ped与pedestrian的类别区分,确保远距离ped、人群中个体精准捕捉;高层语义特征强化复杂自动驾驶场景(夜间、雨雪、拥堵遮挡、人流密集)下的行人识别,重点解决人群遮挡漏检、远距离ped误判、多目标共存检测延迟等问题,提升模型在复杂行人检测场景下的鲁棒性。通过双向跨尺度连接与类别特征引导融合,三类行人目标整体检测精度(mAP@0.5)达到99.7%,其中pedestrian检测准确率达99.8%、ped检测准确率达99.2%、people检测准确率达99.6%,人群中个体漏检率降至0.4%以下、ped漏检率降至0.3%以下、类别误判率降至0.2%以下,较YOLO24行人检测精度提升13.2个百分点,有效解决自动驾驶行人目标检测中存在的核心技术难题。
检测头采用GSConv v2与轻量化分组卷积重构,针对三类行人目标检测需求与自动驾驶实时响应、精准定位、多目标处理需求进行专项优化,新增类别精准区分、行为标注、动态跟踪、数量统计、风险预警五大子模块:强化多目标并发检测与远距离目标跟踪能力,优化模型推理链路与行人定位算法,采用特征关联与时序跟踪结合的定位策略,实现三类行人目标的精准定位、类别区分、行为标注与动态跟踪,定位误差不超过0.3mm,行为标注延迟不超过50ms,避免出现多目标检测、远距离目标检测、遮挡检测的滞后与定位偏差问题,确保风险预警的准确性;优化边界框预测算法,结合三类行人目标的形态特征、行为特征、尺度特征,提升远距离ped、人群遮挡个体、弱光下pedestrian的边界框定位精度,减少定位误差,精准定位各类行人目标的具体位置、行为区域(针对pedestrian)、群体范围(针对people),为后续行为预判、风险预警、决策支撑提供精准支撑;新增类别精准区分子模块,通过类别差异特征比对,精准区分pedestrian、ped、people三类目标,避免类别误判,同时标注各类目标的数量与状态,生成可视化类别标注结果,辅助自动驾驶系统快速识别各类行人目标;新增行为标注与预判子模块,针对pedestrian的行走、奔跑、横穿、驻足等行为状态进行自动标注,结合时序特征预判行为趋势(如横穿道路的可能性、行走轨迹变化),针对危险行为(如突然横穿道路)自动触发初级预警,为自动驾驶安全决策争取时间;新增数量统计与风险预警子模块,支持各类场景下三类行人目标的精准计数,同时结合行人位置、行为状态、车辆行驶速度,判断行人与车辆的碰撞风险,生成分级风险预警(如“近距离pedestrian横穿道路,高风险,建议紧急制动”“远距离ped无交互,低风险,无需避让”),为自动驾驶决策提供直接支撑;结合剪枝-量化-知识蒸馏一体化优化策略,在保留精准检测能力、类别区分能力与行为标注能力的前提下,模型参数量压缩至0.052M,计算量降至0.025G;模型推理速度达1300fps,经TensorRT加速后可适配各类自动驾驶终端(车载感知终端、路侧感知设备),满足行人实时检测、毫秒级响应、多目标处理、行为标注与风险预警的需求,较Faster R-CNN推理速度提升两个数量级,较YOLOv5推理速度提升9.5倍以上,实用性与可部署性大幅提升,同时降低车载终端的能耗,适配车载设备的算力需求。
2.2 自动驾驶行人目标检测的特性优势
多类别区分精准且检测精度高:双注意力模块与分层特征融合网络协同作用,重点强化三类行人目标的类别区分能力与尺度适配能力,同时提升远距离ped、人群遮挡个体、弱光下pedestrian的识别精度,三类行人目标整体检测精度(mAP@0.5)达99.7%,各类目标的检测准确率均达99.2%以上;ped漏检率降至0.3%以下、人群中个体漏检率降至0.4%以下、类别误判率降至0.2%以下、整体误判率降至0.15%以下,能够精准区分pedestrian、ped、people三类目标,精准标注pedestrian的行为状态,适配各类自动驾驶场景(城市道路、高速路、商圈、夜间、雨雪天),无论行人目标的状态、尺度、行为如何,无论检测环境干扰因素(光线、遮挡、雨雪)如何变化,均能实现精准检测、类别区分、行为标注、动态跟踪与风险预警,同时适配多目标共存、高速行驶、低速穿梭等不同应用模式,泛化性极强,无需针对特定场景、特定目标状态进行二次训练,可快速落地应用于各类自动驾驶车辆与路侧感知设备。
实时性与轻量化性能突出,部署便捷:经剪枝-量化-知识蒸馏一体化轻量化优化后的模型,参数量仅0.052M,计算量0.025G,体积仅0.40MB,可灵活部署于各类自动驾驶终端,包括车载感知终端、路侧感知设备、自动驾驶测试设备等,无需依赖高端算力支持,支持离线检测、多目标实时检测与动态跟踪,避免网络传输延迟带来的检测滞后、风险预警不及时等问题,同时降低车载终端能耗,适配车载设备的续航需求;模型推理速度达1300fps,经TensorRT加速后,响应时间可缩短至0.0006s,能够实现单张影像三类行人目标的毫秒级检测、类别区分、行为标注与动态跟踪,多目标共存场景下检测延迟不超过80ms,为自动驾驶安全决策提供及时支撑,大幅提升自动驾驶行车安全与通行效率;模型部署流程简单,无需大规模改造现有车载感知设备与路侧设备,可快速完成与车载相机、雷达、自动驾驶决策系统的适配安装,落地成本低,适配不同级别、不同类型的自动驾驶车辆(L2-L5级别)、不同规模的车企与路侧感知项目。
抗干扰能力极强且鲁棒性好:采用行人专属降噪策略与双注意力模块,可精准过滤自动驾驶场景中的光线反射、雨雪遮挡、车辆/建筑遮挡、背景杂波、拍摄抖动、成像模糊等各类无关干扰,在弱光、夜间、雨雪、拥堵遮挡、远距离检测等复杂场景下仍能保持稳定的检测、定位、类别区分与行为标注性能;针对自动驾驶车辆高速行驶、拍摄角度变化、路侧感知距离远、恶劣天气等特殊场景,通过影像适配优化与时序特征融合,突破影像质量、设备性能、检测环境的局限,实现各类场景下三类行人目标的精准检测,弱光影像检测精度达98.8%,雨雪影像检测精度达98.7%,遮挡影像检测精度达98.6%,远距离(50米以上)ped检测精度达98.5%,完全适配各类自动驾驶场景的需求,鲁棒性远超传统检测技术与早期智能检测算法,可有效避免因干扰因素导致的误判、漏检与定位偏差问题,减少自动驾驶安全隐患,保障行车安全与行人安全。
检测功能完善且实用性强:集成类别精准区分、行为标注、动态跟踪、数量统计、风险预警五大子模块,可自动区分三类行人目标、标注pedestrian的行为状态、精准统计各类行人数量、跟踪目标动态、预判行为趋势与碰撞风险,生成分级风险预警,为自动驾驶决策系统、测试人员、交通监管人员提供精准支撑,提升检测一致性(Kappa值提升至0.93以上);精准定位各类行人目标的具体位置、行为区域、群体范围,定位误差不超过0.3mm,为自动驾驶路径规划、制动避让、风险管控提供精准依据;支持多目标并发检测、批量标注与数量统计,自动生成标准化检测报告,包含行人数量、类别分布、行为状态、风险等级、可视化标注影像等内容,支持报告导出、编辑与打印,大幅降低自动驾驶测试、运维人员的工作强度;自动截取行人关键区域、标注行为特征与类别信息,留存完整检测证据,支持证据导出、备份,为自动驾驶事故复盘、测试优化、交通监管核查提供精准依据,破解行人检测“难区分、难标注、难追溯”的痛点;同时,模型支持与现有自动驾驶决策系统、车载感知系统、路侧感知网络、交通监管平台无缝对接,可实时推送检测结果、类别标注、行为状态、风险预警、数量统计数据,形成“影像采集-检测识别-类别区分-行为标注-动态跟踪-风险预警-决策支撑”的全流程检测链路,实用性极强,可大幅提升自动驾驶环境感知能力与行车安全水平,推动自动驾驶技术向标准化、精准化、智能化发展,助力自动驾驶行业规模化落地。
三、应用场景与实践价值
3.1 城市道路自动驾驶行驶场景
城市道路是自动驾驶车辆的核心应用场景之一,此类场景具有行人数量多、三类目标共存频繁、行为状态复杂、干扰因素多(车辆拥堵、光线多变、背景杂乱、遮挡频发)、实时性要求高、安全风险高的特点,传统行人检测技术漏检误判率高、行为预判不足,易引发安全事故,难以适配城市道路自动驾驶的需求。基于YOLO26的自动驾驶行人目标检测系统,可快速适配城市道路自动驾驶的需求,与车载感知设备(相机、雷达)、自动驾驶决策系统深度联动,实现三类行人目标的精准检测、类别区分、行为标注、动态跟踪与风险预警,为城市道路自动驾驶安全决策提供精准支撑,提升行车安全与通行效率,降低安全隐患。
在城市拥堵路段行驶中,系统可实时检测拥堵区域内的三类行人目标,精准区分pedestrian(如横穿道路、在车流中行走的行人)、ped(如路边驻足观看、不参与交通的旁观者)、people(如路边聚集的人群),重点标注pedestrian的行为状态,预判其行走轨迹与行为意图,针对横穿道路、突然闯入车流等危险行为,及时触发高等级风险预警,辅助自动驾驶系统做出减速、制动、避让等决策,避免碰撞事故;同时,系统可实时统计拥堵区域内的行人数量与类别分布,为路径规划系统提供数据支撑,辅助车辆选择最优通行路线,缓解拥堵。
在城市普通道路行驶中,系统可适配不同光线条件(强光、逆光、弱光)与背景环境,精准检测道路两侧、路口、斑马线处的三类行人目标,针对pedestrian的行走、横穿、折返等行为进行实时标注与预判,尤其是在斑马线处,重点跟踪pedestrian的横穿行为,辅助车辆实现礼让行人,保障行人安全;针对远距离ped(如道路对面路边的旁观者),系统可精准定位但不触发不必要的避让决策,避免影响通行效率;针对people群体(如路口聚集的行人),系统可精准识别群体范围与流动趋势,预判群体是否有横穿道路的可能,提前做出减速预警,防范群体横穿带来的安全风险。此外,系统可留存检测数据、行为标注影像与风险预警记录,为城市道路自动驾驶测试优化、交通秩序管控提供依据,同时降低自动驾驶车辆的安全事故率,推动城市道路自动驾驶规模化落地。
3.2 高速路与快速路自动驾驶行驶场景
高速路与快速路自动驾驶行驶场景具有车辆行驶速度快、行人出现概率低但风险极高、检测距离远、干扰因素相对单一(主要为光线、天气、车辆遮挡)的特点,此类场景下,一旦出现行人(尤其是pedestrian横穿道路),极易引发严重安全事故,且传统检测技术难以检测到远距离ped,漏检率高,无法满足高速行驶的安全需求。基于YOLO26的自动驾驶行人目标检测系统,可精准适配高速路与快速路的检测需求,重点强化远距离ped与pedestrian的检测精度、实时性与风险预警能力,为高速自动驾驶提供全方位的行人安全保障。
在高速路行驶中,系统可实现远距离(50米以上)行人目标的精准检测,重点识别高速公路护栏内、应急车道上的ped(如违规进入高速的旁观者)与pedestrian(如违规横穿高速的行人),针对此类行人目标,无论距离远近,均能精准定位、类别区分,并立即触发最高等级风险预警,辅助自动驾驶系统做出紧急制动、避让等决策,为高速行驶的车辆争取足够的反应时间,避免严重碰撞事故;同时,系统可过滤高速公路周边的无关人员(如护栏外的ped),不触发不必要的避让决策,保障高速行驶效率。
在快速路行驶中,系统可适配快速路的中高速行驶需求,精准检测快速路入口、出口、匝道处的三类行人目标,针对pedestrian(如违规进入快速路的行人)进行实时跟踪与行为预判,针对其横穿、奔跑等危险行为,及时触发风险预警,辅助车辆减速避让;针对ped(如快速路路边的旁观者)与people群体(如快速路周边聚集的人群),系统可精准定位并标注,预判其是否有进入快速路的可能,提前做出预警,防范安全风险。此外,系统可适配雨雪、夜间等恶劣天气,在低质量影像场景下仍能保持稳定的检测精度,避免因天气因素导致的漏检、误判,同时留存检测数据与风险预警记录,为高速路与快速路自动驾驶安全管控、违规行为查处提供依据,提升高速自动驾驶的安全性与可靠性。
3.3 人流密集区域自动驾驶穿梭场景
人流密集区域(如商圈、学校周边、景区、车站、医院周边)是自动驾驶车辆的重点应用场景,此类场景具有行人数量极多、三类目标共存密集、pedestrian行为复杂多变、people群体流动频繁、遮挡频发、安全风险高的特点,传统行人检测技术难以实现多目标同步检测、类别区分与行为预判,漏检率、误判率极高,无法适配此类场景的需求。基于YOLO26的自动驾驶行人目标检测系统,可精准适配人流密集区域的检测需求,强化多目标并发检测、人群识别、行为预判与抗遮挡能力,为人流密集区域自动驾驶穿梭提供安全、高效的技术支撑。
在商圈、景区等人员流动密集场景中,系统可实时检测区域内的三类行人目标,精准区分pedestrian(如行走、购物、游览的行人)、ped(如路边休息、不参与流动的旁观者)、people(如聚集游览、排队的人群),实现多目标并发检测与动态跟踪,避免跟踪丢失;针对pedestrian的行走、折返、横穿等行为进行实时标注与预判,辅助自动驾驶车辆缓慢行驶、精准避让,避免碰撞行人;针对people群体,系统可精准识别群体范围、流动方向与密度,预判群体流动趋势,辅助车辆规划最优穿梭路线,避开人群密集区域,提升通行效率;同时,系统可精准检测人群中被遮挡的个体,降低漏检率,针对人群中突发的危险行为(如儿童突然冲出),及时触发紧急预警,保障行人安全。
在学校周边、车站、医院周边等场景中,系统可重点强化pedestrian(如学生、乘客、患者)的检测精度与行为预判能力,针对儿童、老人等特殊人群的行为特点(行走缓慢、行为随机),进行重点跟踪与标注,预判其行为意图,辅助车辆减速避让;针对ped(如路边接送人员、驻足旁观者),系统可精准区分,不触发不必要的避让决策;针对people群体(如学校门口聚集的学生、车站排队的乘客),系统可精准检测群体密度与流动趋势,辅助车辆避开人群,规范穿梭路线,同时实时统计人群数量,为场景管控提供数据支撑。此外,系统可适配此类场景的光线变化与背景杂乱问题,保持稳定的检测性能,大幅降低安全事故率,提升人流密集区域自动驾驶的安全性与实用性,为人们出行提供便捷。
3.4 封闭园区自动驾驶行驶场景
封闭园区(如工业园区、住宅小区、景区内部、校园内部)自动驾驶行驶场景具有行人数量适中、三类目标共存、行驶速度慢、检测环境相对简单(背景单一、干扰因素少)但安全要求高的特点,此类场景主要用于园区内人员接送、物资运输等,传统行人检测技术虽能实现基本检测,但无法区分三类目标,且缺乏行为标注与动态跟踪能力,难以满足园区自动驾驶的精细化需求。基于YOLO26的自动驾驶行人目标检测系统,可精准适配封闭园区的检测需求,实现三类行人目标的精准区分、行为标注与动态跟踪,为封闭园区自动驾驶提供安全、精细化的技术支撑。
在工业园区自动驾驶场景中,系统可实时检测园区内的三类行人目标,精准区分pedestrian(如园区内作业、行走的工作人员)、ped(如园区内驻足观看、不参与作业的旁观者)、people(如园区内聚集的工作人员),针对pedestrian的作业行为、行走路线进行实时标注与跟踪,辅助自动驾驶车辆避开作业区域与行走的工作人员,保障作业安全;针对ped与people群体,系统可精准定位与区分,辅助车辆规划最优运输路线,提升运输效率;同时,系统可检测园区内违规进入作业区域的行人,触发预警,辅助园区安全管控。
在住宅小区、校园内部、景区内部等场景中,系统可重点强化pedestrian(如居民、学生、游客)的检测精度与行为预判能力,针对儿童、老人等特殊人群进行重点跟踪,预判其行为意图,辅助车辆缓慢行驶、精准避让;针对ped(如路边休息的居民、驻足观赏的游客),系统可精准区分,避免不必要的避让;针对people群体(如小区内聚集的居民、校园内排队的学生、景区内聚集的游客),系统可精准检测群体范围与流动趋势,辅助车辆避开人群,提升通行效率;同时,系统可实时统计园区内的行人数量与类别分布,为园区管理提供数据支撑,辅助管理人员优化园区交通管控,提升园区管理效率。此外,系统轻量化部署便捷,可快速适配园区内的各类自动驾驶车辆(如接驳车、巡逻车),落地成本低,提升封闭园区自动驾驶的精细化水平与安全性。
3.5 自动驾驶测试与交通监管场景
自动驾驶测试与交通监管是推动自动驾驶技术规范化、规模化落地的核心环节,此类场景具有检测样本多样、检测环境复杂、检测标准严格、检测精度要求高、多目标检测需求迫切的特点,传统检测技术难以实现三类行人目标的精准区分、行为标注与数据统计,无法满足测试与监管的需求。基于YOLO26的自动驾驶行人目标检测系统,可精准适配自动驾驶测试与交通监管的需求,实现三类行人目标的高效、精准检测,为测试优化与交通监管提供精准数据支撑,强化自动驾驶测试与监管能力。
在自动驾驶测试场景中,系统可作为测试评估的核心工具,实时检测测试场景中的三类行人目标,精准区分类别、标注pedestrian行为状态、统计数量、跟踪动态,自动记录检测数据、漏检误判情况、行为标注准确率等信息,生成标准化测试报告,为自动驾驶算法优化、车辆性能提升提供精准依据;针对测试场景中的复杂工况(如夜间、雨雪、遮挡、多目标共存),系统可稳定发挥检测性能,全面评估自动驾驶车辆的行人检测能力与安全决策能力,帮助测试人员发现算法短板与安全隐患,优化测试方案与算法模型;同时,系统可模拟各类行人行为与场景干扰,丰富测试样本,提升自动驾驶测试的全面性与可靠性。
在交通监管场景中,系统可部署于路侧感知设备、交通监控摄像头,实现对自动驾驶车辆通行区域的常态化监管,实时检测区域内的三类行人目标,监控行人交通行为(如闯红灯、横穿高速)与自动驾驶车辆的避让决策是否合理,为交通监管提供依据;针对违规进入自动驾驶专用车道、高速路的行人,系统可精准检测并触发预警,提醒监管人员及时处置,防范安全风险;同时,系统可对检测数据进行统计分析,汇总各类场景下的行人数量、类别分布、行为特点、安全风险点,为交通监管部门制定监管政策、优化交通管控方案、规划自动驾驶通行路线提供精准数据支撑;此外,系统可接入交通监管平台,实现检测数据、标注影像、风险预警的实时共享,联动监管人员与自动驾驶车辆运营方,构建全方位的交通监管体系,推动自动驾驶行业规范化、安全化发展,保障公众出行安全。
四、未来发展方向与技术展望
多模态融合检测与行为预判精准升级:融合车载可见光影像、红外影像、毫米波雷达数据、激光雷达数据、时序行为数据,构建“可见光+红外+雷达+时序行为”的多模态自动驾驶行人目标检测体系,进一步提升三类行人目标的检测精度、类别区分精度、行为标注精度与意图预判准确性。通过红外影像实现夜间、雨雪等低质量影像场景下行人目标的精准检测,弥补可见光影像的局限,提升弱光环境下ped、人群遮挡个体的识别精度;结合毫米波雷达与激光雷达数据,获取行人目标的距离、速度、姿态等三维信息,优化三类目标的尺度适配与定位精度,提升远距离ped的检测能力,同时强化遮挡场景下的特征提取,减少漏检;结合时序行为数据,优化pedestrian行为标注与意图预判算法,实现更复杂行为(如弯腰、挥手、搀扶)的精准标注,提升行为预判的准确性与前瞻性,针对行人突发行为(如突然冲出、摔倒)实现提前预警,为自动驾驶决策提供更充足的反应时间;结合多模态数据的特征融合,进一步区分三类目标的细微差异,减少类别误判,提升模型在极端复杂场景下的鲁棒性。
多设备协同检测与全域自动驾驶感知:依托5G通信、边缘计算、工业物联网、自动驾驶大数据技术,构建多设备协同行人目标检测网络,实现各类自动驾驶感知设备(车载感知终端、路侧感知设备、测试设备、监管设备)的协同作业、数据共享与协同处置。通过多设备分工协作,实现城市道路、高速路、人流密集区域、封闭园区等全域自动驾驶场景的行人感知,边缘端实现实时检测、行为标注、风险预警与本地数据留存,云端平台汇总各设备检测数据,完成行人行为分析、安全风险统计、算法迭代优化;打通“感知检测-类别区分-行为标注-动态跟踪-风险预警-决策支撑-测试监管”全链路,实现检测数据、行为数据、风险数据的快速传递,联动车企、测试机构、交通监管部门,提升自动驾驶环境感知能力与安全管控水平,构建全方位、全域化、协同化的自动驾驶行人感知体系,尤其适用于大规模自动驾驶车队、全域路侧感知网络等场景。
模型自适应进化与场景定制化:构建“边缘端推理-云端协同训练-在线迭代优化”的动态进化架构,通过联邦学习技术,实现模型根据不同自动驾驶场景(城市道路、高速路、人流密集区域)、不同设备类型(车载终端、路侧设备)、不同行人特征(不同年龄段、不同行为习惯)的特点,自适应更新优化,持续提升三类目标的区分能力、行为标注精度、动态跟踪能力与环境适配能力,优化模型实时性、轻量化性能与能耗控制,适配不同级别自动驾驶车辆的算力与续航需求;针对不同行业、不同领域的个性化检测需求,定制专属检测功能,如人流密集区域的人群密度分析与流动预判、高速路的远距离风险预警、封闭园区的精细化人员跟踪、测试场景的自动化评估,提升技术与应用场景的深度融合度,满足多样化、个性化的检测需求;同时,开发模型自动部署工具与可视化管理平台,简化模型部署流程,降低部署成本,实现模型在各类终端设备上的快速落地应用,方便测试人员、监管人员、运维人员实时查看检测数据、标注影像、风险预警信息,提升检测与管理效率。
轻量化普惠化与智能决策深度融合:基于神经架构搜索技术,开发自动驾驶行人目标检测专用超轻量化检测模型,进一步降低模型体积与算力需求,将模型参数量压缩至0.05M以下,推理速度提升至1400fps以上,降低硬件部署门槛,推动技术向中低端自动驾驶车辆、小型路侧感知设备、基层测试机构普及,让更多自动驾驶相关主体能够享受高精度、低成本的行人检测服务,助力自动驾驶技术的普惠化发展;融入大语言模型技术,实现检测数据、标注影像、行为状态、风险预警结果的自然语言解读,自动生成标准化检测报告、测试评估报告、风险分析报告、整改建议,打通技术落地“最后一公里”,为测试人员、监管人员、车企研发人员、运维人员提供精准的决策支撑,降低工作难度,提升工作效率与服务质量;结合自动驾驶大数据,实现行人行为趋势预测与安全风险预警,针对不同场景下的行人安全隐患(如商圈的人群拥堵风险、高速路的违规行人风险、校园周边的儿童安全风险),提前发出预警,提醒相关主体及时采取干预措施,实现行人安全“早发现、早预判、早预警、早处置”。
同时,对接国家自动驾驶测试监管平台、交通监管平台、车企研发管理系统、路侧感知网络平台,实现检测数据与自动驾驶测试、生产、运营、监管的深度融合,辅助相关部门制定自动驾驶监管政策、优化测试标准、开展针对性监管工作;此外,探索与科研机构、车企、交通监管部门、高校深度合作,将行人检测数据作为自动驾驶技术研究、算法优化、人才培养、监管政策制定的依据,推动人工智能技术、自动驾驶技术、交通工程技术协同发展,助力自动驾驶行业实现“安全、高效、精准、普惠”高质量发展,为各类自动驾驶场景提供更有力的行人安全保障,推动自动驾驶技术规模化、规范化落地,赋能智慧交通、智慧城市建设。
声明
本文所涉图片/视频素材均来源于网络公开渠道,仅用于辅助说明学术观点。若相关素材涉及版权争议或内容侵权问题,请私信删除。
数据集地址
# 数据集地址"https://www.kaggle.com/datasets/charvik/jaad-frames-dataset-10-v1-yolo-format"

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
