亲爱的读者们,您是否在寻找某个特定的数据集,用于研究或项目实践?欢迎您在评论区留言,或者通过公众号私信告诉我,您想要的数据集的类型主题。小编会竭尽全力为您寻找,并在找到后第一时间与您分享。 目标检测开源数据集是计算机视觉领域的重要基石,支撑目标检测任务的算法研发、模型训练与性能评估,兼顾样本的丰富性、场景的覆盖性与应用的通用性。它包含海量标注精细的图像或视频样本,覆盖日常场景(如行人、车辆、家具)、自然场景(如动物、植物、地形)、工业场景(如机械零件、生产流水线)等数十类通用目标,也涵盖医疗场景(如血细胞、病灶区域)、遥感场景(如建筑、农田、舰船)、自动驾驶场景(如交通标志、障碍物)等专业领域目标。优质的目标检测开源数据集不仅样本数量充足、场景多样性强,还具备精准的目标边界框标注(部分含目标类别、姿态、遮挡状态等属性信息),并合理划分为训练集、验证集与测试集,能够有效支撑算法创新与模型优化,广泛用于目标检测模型开发、AI 产品(如智能监控、自动驾驶系统、医疗诊断设备)落地与学术研究(如算法性能对比、新方法验证),为计算机视觉技术从理论研究走向实际应用提供关键数据支撑。
目标检测开源数据集是计算机视觉领域的重要基石,支撑目标检测任务的算法研发、模型训练与性能评估,兼顾样本的丰富性、场景的覆盖性与应用的通用性。它包含海量标注精细的图像或视频样本,覆盖日常场景(如行人、车辆、家具)、自然场景(如动物、植物、地形)、工业场景(如机械零件、生产流水线)等数十类通用目标,也涵盖医疗场景(如血细胞、病灶区域)、遥感场景(如建筑、农田、舰船)、自动驾驶场景(如交通标志、障碍物)等专业领域目标。优质的目标检测开源数据集不仅样本数量充足、场景多样性强,还具备精准的目标边界框标注(部分含目标类别、姿态、遮挡状态等属性信息),并合理划分为训练集、验证集与测试集,能够有效支撑算法创新与模型优化,广泛用于目标检测模型开发、AI 产品(如智能监控、自动驾驶系统、医疗诊断设备)落地与学术研究(如算法性能对比、新方法验证),为计算机视觉技术从理论研究走向实际应用提供关键数据支撑。1、小程序(打开小程序,快速查找开源数据集)
2、背景介绍
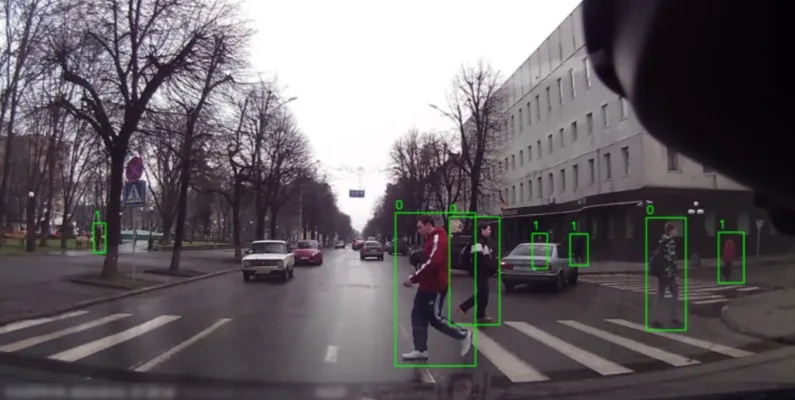
自动驾驶中行人目标检测是自动驾驶车辆安全行驶、道路交通安全防控、智能交通体系构建及自动驾驶技术落地的核心技术支撑,它融合道路影像增强算法、动态目标噪声抑制模型及行人精准识别体系,可在复杂交通场景(如雨天雾天能见度低、强光逆光照射、早晚高峰人流密集、路边障碍物遮挡、不同光照条件成像差异及行人姿态多变等)中,精准识别三类目标——pedestrian(行人):带有行为标注的行人、ped(旁观者):距离较远且不与驾驶员产生交互的人员、people(人群):成群的行人的典型形态、运动轨迹、位置分布、行为状态及移动速度,实现对行人违规横穿马路、突然闯入行车区域、人群聚集占道、旁观者意外靠近车道等危险情况的实时捕捉与精准判定。相较于传统人工驾驶依赖驾驶员肉眼观察、经验判断的行人识别方式,自动驾驶中行人目标检测技术可突破人工观察反应速度慢、视野盲区多、疲劳驾驶漏判误判率高、复杂场景下微小目标识别困难及高密度人流检测适配性不足的瓶颈,实现对道路全域行人目标的全域化、精细化、智能化检测,大幅提升自动驾驶车辆的行驶安全性、道路通行效率、复杂场景适配能力及智能管控水平,推动自动驾驶从辅助驾驶向完全自动驾驶升级、从人工监控向智能预警转变,最大限度降低行人交通事故发生率、减少道路安全隐患,为自动驾驶技术规模化落地、智能交通体系规范化发展及道路交通安全保障提供精准的数据支撑与技术保障,在自动驾驶感知、决策、控制全流程中发挥着不可替代的技术赋能作用。
3、数据集详情
本数据集来源于开源网Kaggle(https://www.kaggle.com/)。数据集信息如下所示。数据集共包括3类,划分为训练集、验证集和测试集。
# 目录结构PersonDataset/├── images/│ ├── train/ │ ├── val/ │ └── test/ └── labels/ ├── train/ ├── val/ └── test/ # 适用算法YOLO系列 "YOLOv5/YOLOv8/YOLOv11/YOLO26"等等
4、YOLOv11源码
# 训练代码from ultralytics import YOLOif __name__ == '__main__': model = YOLO(r"yolo26n.yaml") model.load("yolo26n.pt") results = model.train(data=r"Person.yaml", epochs=300, imgsz=640, batch=32, workers=4, device=0, name="train_Person")# 验证代码from ultralytics import YOLOmodel = YOLO("best.pt")results = model.val(data='Person.yaml', project="runs", imgsz=640, batch=32, workers=4)print(results)# 预测代码from ultralytics import YOLOmodel = YOLO("best.pt")results = model.predict("Person.jpg", save=True, imgsz=640, conf=0.5)for result in results: boxes = result.boxes probs = result.probs result.show()
5、应用场景
在自动驾驶行人目标检测场景中,pedestrian、ped、people 三类目标特征各异、行为特征可区分,适配场景明确且针对性强:城市道路常规行驶场景中,pedestrian(带有行为标注的行人)为核心检测目标,主要用于识别行人横穿、驻足、折返、避让等动态行为,精准预判运动轨迹,检测重点为行为意图识别、路径趋势判断;城郊公路、快速路行驶场景中,ped(旁观者)检测聚焦于道路两侧、隔离区域等位置远距离无交互人员的定位与动态监测,规避无关人员突发闯入带来的通行风险;商圈、学校、景区、社区等人流密集路段行驶场景中,people(人群)检测重点完成群体区域定位、人群密度分析与流动方向判断,辅助车辆提前减速、规划最优避让路线;车辆低速泊车、园区内行驶等封闭场景中,三类目标协同检测实现全域人员精准感知,精准区分行人行为、状态与聚集情况,该技术可精准识别自动驾驶全场景下的各类人员目标,快速完成行为预判、风险预警与通行决策辅助,辅助各行驶场景高效开展安全管控,助力自动驾驶环境感知的精准化、智能化升级。6、数据集地址
# 数据集地址"https://www.kaggle.com/datasets/charvik/jaad-frames-dataset-10-v1-yolo-format"# 注意事项"下载可能需要VPN"
7、公众号(关注我,获取更多开源数据集)
"开源数据集" 地址获取方式第1-197期 数据集地址:公众号后台 发送"第n期"获取数例如: "第1期"第198期及之后 数据集地址:查看对应"文章末尾",数据集地址在文章末尾例如: 第198期的数据集地址 "请查看第198期文章末尾"