在自动驾驶技术飞速发展的当下,运动规划作为核心决策环节,直接决定了车辆能否安全、高效、舒适地完成行驶任务。模型预测控制(MPC)凭借滚动时域优化的优势,成为运动规划的主流方法,但面对基于神经网络的车辆动力学模型(神经状态空间模型,NSS)时,传统基于梯度的MPC求解器却陷入了“算力高、收敛难”的困境。近日,Iman Askari、Ali Vaziri、涂学敏等学者提出了全新的模型预测推断控制(MPIC)框架,彻底摆脱对梯度优化的依赖,将非线性非凸的MPC问题转化为贝叶斯状态估计问题,结合创新的隐式粒子滤波/平滑方法,让自动驾驶车辆在复杂NSS模型下的运动规划速度提升一个数量级以上,即便面对长预测视野也能稳定求解。今天,我们就来深度解读这项极具突破性的研究成果。
一、自动驾驶运动规划的“卡脖子”难题
自动驾驶车辆的运动规划,需要根据车辆动力学模型,在满足避障、道路边界、车辆物理极限等约束的前提下,规划出最优的行驶轨迹和控制指令。传统MPC方法虽能兼顾模型约束与优化目标,但遇到NSS模型时却力不从心。
NSS模型凭借神经网络强大的拟合能力,能从海量数据中精准捕捉车辆复杂动力学特性,甚至覆盖极端驾驶场景,但这种数据驱动模型的高度非线性、非凸特性,让基于梯度的MPC优化求解器举步维艰:一方面,计算成本居高不下,难以满足自动驾驶实时性要求;另一方面,初始猜测不准确时极易失效,长预测视野下更是难以收敛。
这就形成了一个核心矛盾:越精准的车辆模型(NSS),越难通过传统MPC实现高效的运动规划。而本次研究提出的MPIC框架,正是为破解这一矛盾而来。
二、MPIC框架核心:从“优化求解”到“推断估计”的范式革新
MPIC框架的核心思路,是将原本需要优化求解的MPC问题,等价转化为贝叶斯状态估计(平滑)问题,通过“推断”而非“优化”生成最优控制决策。先来看MPIC框架的总体结构:
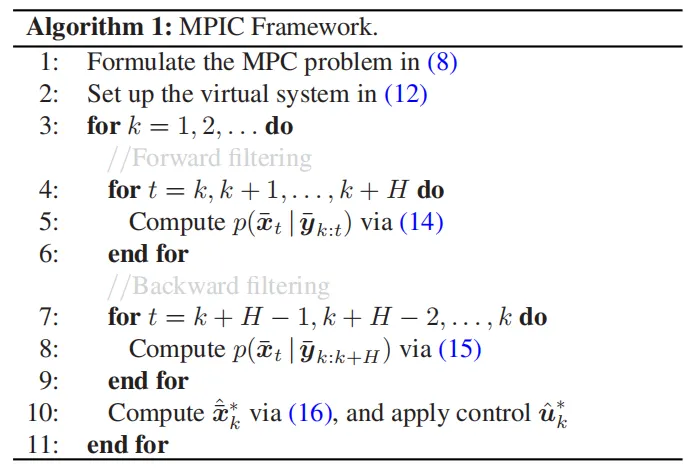
从整体架构可以清晰看到,MPIC框架以“前向滤波+后向平滑”的滚动时域方式运行,核心分为三个关键步骤:
1. 构建虚拟随机系统,实现MPC与估计问题的等价转换
为了建立控制与估计的联系,研究团队构建了一个虚拟随机系统,将MPC问题中的目标函数(如轨迹跟踪、控制量平滑)转化为虚拟系统的似然函数,将避障、道路边界、车辆执行限度等约束转化为虚拟系统的“虚拟观测”。
在特定的高斯噪声假设下,研究团队严格证明:MPC问题的最优解,与这个虚拟系统的最大后验(MAP)状态估计问题的解完全等价。这一步是整个框架的理论基石,相当于为“用估计方法解决控制问题”打通了逻辑通路。
2. 隐式粒子滤波/平滑器:高效捕捉高概率解空间
解决了“等价转换”问题后,关键就是如何高效执行贝叶斯状态估计。传统粒子滤波/平滑方法需要大量粒子才能保证精度,容易出现粒子退化,计算效率低下。
为此,研究团队基于“隐式重要性采样”原理,开发了全新的隐式粒子滤波/平滑方法:不再盲目生成大量粒子,而是通过局部高斯近似,将粒子更新过程转化为并行运行的无迹卡尔曼滤波器/平滑器组(Kalman-IPF/IPS) 。
这种设计的核心优势在于,能精准生成位于“高概率区域”的粒子——简单来说,就是让粒子都集中在最可能是最优解的范围内,既保证了估计精度,又极大减少了粒子数量,有效缓解了粒子退化问题,计算效率大幅提升。
3. MPIC-X算法:从框架到落地的完整实现
将上述隐式粒子滤波/平滑器(基于无迹变换实现)集成到MPIC框架中,就形成了完整的MPIC-X算法。这套算法的最大亮点在于:
- 计算速度极快:比基于梯度的MPC(如IPOPT)快一个数量级以上;
- 适配长预测视野:即便预测视野H=40、60(远超传统方法的处理能力),仍能稳定求解。
三、NSS车辆模型:精准但“难用”的动力学建模方案
要理解MPIC的价值,首先要清楚NSS模型的特点。研究中使用的神经状态空间车辆模型,核心是用前馈神经网络捕捉车辆的连续时间状态演化,再通过欧拉法、龙格-库塔法等离散化,得到离散时间域的状态演化公式。
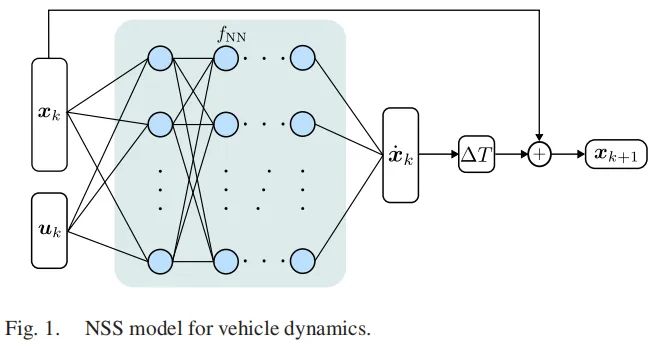
如上图所示,NSS模型虽数学形式简洁,但能通过多层隐藏层从数据中提取高精度的车辆动力学特征,相比传统基于物理的车辆模型,无需繁琐的人工推导和校准,能捕捉更多不确定性和极端场景下的车辆行为。
但也正因如此,NSS模型的非线性和非凸性让传统MPC求解器“束手无策”——而这正是MPIC框架的核心应用场景:让精准的NSS模型真正能落地应用。
四、驾驶约束与目标:MPIC的“优化目标”如何落地?
MPIC框架要解决的运动规划问题,需要兼顾多维度的驾驶要求,这些要求最终都转化为贝叶斯估计的“证据”:
1. 安全优先:避障与道路边界约束
- 避障:要求自车与障碍车辆保持至少的安全距离,确保安全区域无交集;
- 道路边界:自车偏离车道中心线的距离需控制在车道宽度范围内,预留的安全裕度。
2. 物理可行:车辆执行限度约束
不仅限制加速度、转向角的绝对值范围,还通过约束控制增量(),保证控制指令的平滑性,兼顾乘客舒适性。
3. 多目标优化:轨迹跟踪与控制平滑
代价函数会惩罚轨迹跟踪误差(与高层决策的名义轨迹偏差)、控制量偏差(与名义控制输入的差异)、控制增量(保证驾驶平顺性),最终实现多目标的平衡。
传统MPC需要将这些约束和目标纳入非线性优化问题,计算量巨大;而MPIC将其转化为虚拟系统的观测值,通过贝叶斯推断快速找到最优解,这是两者最核心的区别。
五、仿真验证:MPIC-X算法的实战表现
研究团队通过不同场景的自动驾驶仿真,将MPIC-X与基于梯度的MPC进行全面对比,结果验证了MPIC的核心优势:
- 计算效率:在相同硬件条件下,MPIC-X处理NSS模型的运动规划任务,耗时仅为传统MPC的1/10左右;
- 求解稳定性:长预测视野下,传统梯度MPC易发散,而MPIC-X始终能输出稳定的控制决策;
- 规划质量:在避障、轨迹跟踪、舒适性等维度,MPIC-X的表现与传统MPC持平甚至更优——既快又准。
六、总结:自动驾驶运动规划的“新范式”
这项研究的核心贡献,不仅是提出了一套高效的算法,更是开创了一种全新的控制范式:
- 理论层面:建立了MPC问题与贝叶斯状态估计问题的等价关系,为非线性非凸控制问题提供了新的求解思路;
- 方法层面:开发的隐式粒子滤波/平滑器,解决了传统粒子滤波的效率和退化问题;
- 应用层面:MPIC-X算法让NSS模型真正能落地,为自动驾驶车辆的高精度运动规划提供了可行方案。
对于自动驾驶行业而言,MPIC框架的价值在于:在保证运动规划精度和安全性的前提下,大幅提升计算效率,适配更复杂的车辆模型和更长的预测视野——这意味着自动驾驶车辆能更精准地预判路况、更快速地做出决策,离真正的全场景落地又近了一步。
未来,这套框架还可进一步扩展到更复杂的NSS模型,或结合强化学习等技术,探索更多自动驾驶决策的新可能。## 论文信息
题目:Model Predictive Inferential Control of Neural State-Space Models for Autonomous Vehicle Motion Planning作者:Iman Askari, Ali Vaziri, Xuemin Tu, Shen Zeng, Huazhen Fang
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
