本节开始介绍雷达前端算法,即雷达如何配置。
首先这里推荐两本书:FMCW Radar Design 和 Radar Signal Processing for Autonomous Driving
1、测角原理
Ref:https://wirelesspi.com/fmcw-radar-part-2-velocity-angle-and-radar-data-cube/
理解了速度部分之后,计算到达方向就变得简单了。这是因为它们都基于类似的原理。
就像ADC在时域对信号进行采样一样,天线阵列在空域对信号进行采样。
对于速度,读数是在同一天线上连续两次间隔 TC 秒的chirp中进行的。两者之间的差异在于
Δτ=2Δd/c=2vTC/c
由此可以计算出速度v。
对于角度,需要同时读取两个相距 d 米的相邻天线的读数。差值为 Δτ=Δdc=dsinθc,由此可以计算出角度 θ。
考虑一个只有两个单元的间距为d的天线阵列。选择上方天线作为参考点,当平面波以一定角度到达时会发生什么情况?显然,波必须传播一段额外的距离才能到达下方天线。
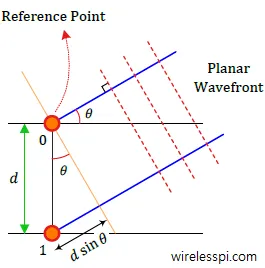
图1 二元天线阵示意图两个天线单位之间的时间差为:Δτ=Δd/c=dsinθ/c
两个天线单位之间的相位差为:Δϕ=2πfΔτ=2πΔd/λ=2πdsinθ/λ
θ=sin(-1)[λΔϕ/(2πd)]
推广以上到n个阵元
a[n]=constant⋅exp(ϕn)→exp(j2πf⋅nΔτ)=exp(j2πndsinθ/λ)
这是一个“频率”为 dsinθ/λ 的复正弦波。如下图所示,其中空间维度上的相位演变与 FFT 幅度一起绘制。显然,距离单元中的相位会生成另一个复正弦波(其中 sin(⋅) 部分也显示出来),可用于角度估计。
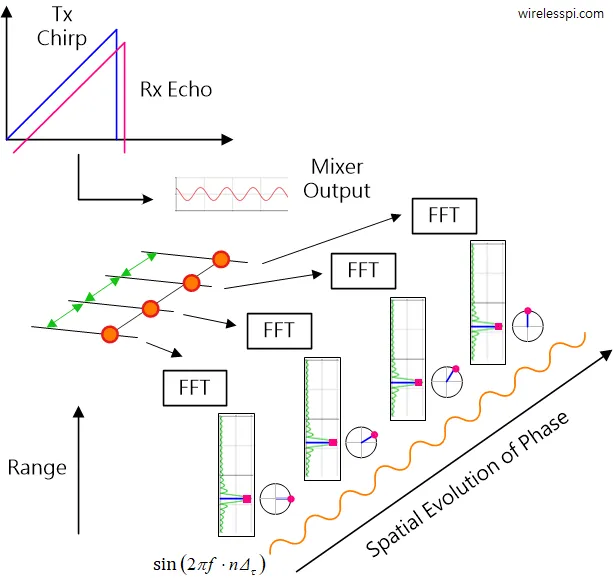 图2 角度FFT
图2 角度FFT现在,二维 FFT 将显示所有目标在相同距离和速度下相对于雷达的峰值。但沿此空间轴(即天线到天线,但在二维距离-多普勒 FFT 的距离-速度区间)进行另一次傅里叶变换,会显示一个峰值,该峰值对应于dsinθ/λ,从而确定每个目标的角度或方向。这个过程与波束形成相同。
2、Radar Data Cube
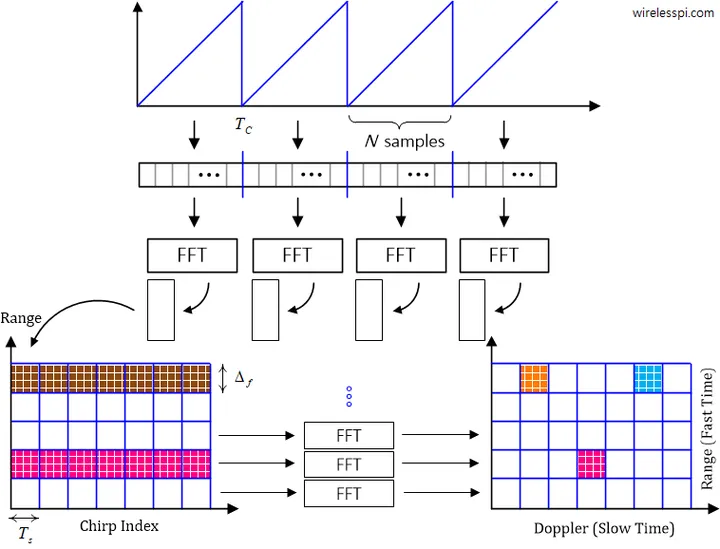 图3 雷达二维数据
图3 雷达二维数据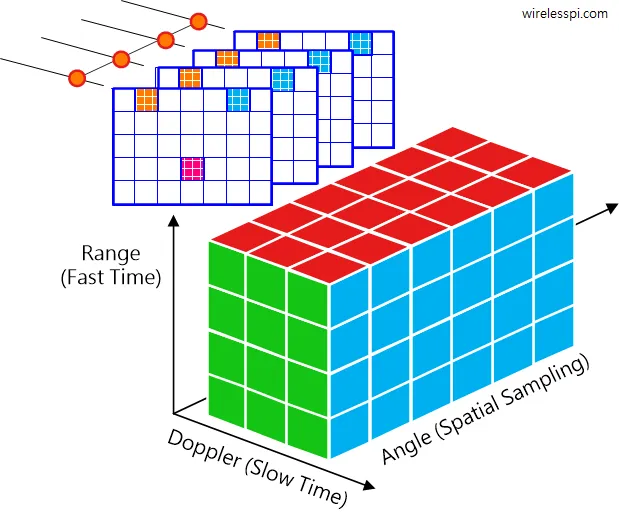 图4 雷达三维数据
图4 雷达三维数据3、雷达测角配置
FMCW雷达的虚拟阵,以3T4R为例。每个接收天线都会收到3个发射天线的回波,同时要区分这3个回波,并在数据cube上讲数据排列出来。
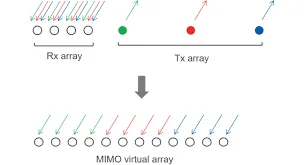 图5 虚拟阵的形成
图5 虚拟阵的形成从而形成虚拟阵。如何区分就是要在雷达波形配置中进行了:
Ref:https://encyclopedia.pub/entry/23781
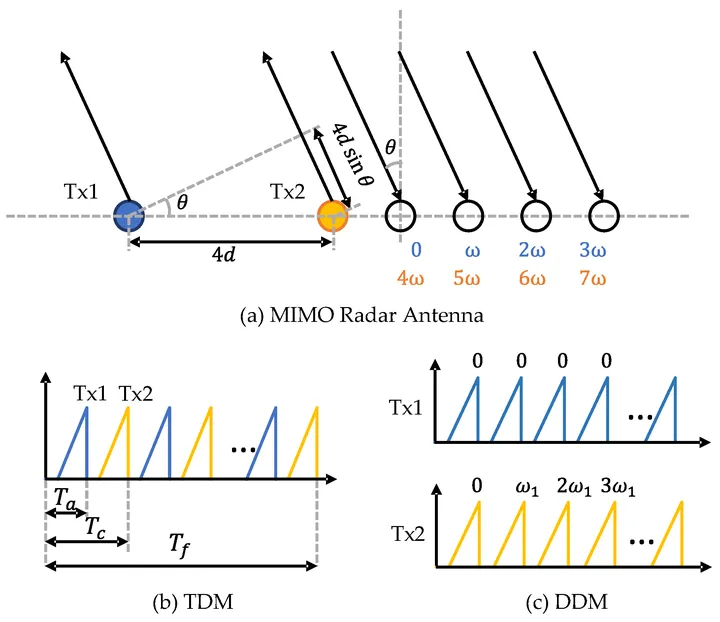 图6 TDM 和 DDM
图6 TDM 和 DDMFMCW TDM配置是指在雷达系统中结合了频率调制连续波(FMCW)和时分多路复用(TDM)技术的配置方式。TDM技术则通过在不同时间点激活不同的发射天线,实现多输入多输出(MIMO)雷达的正交性,从而提高雷达的探测和定位能力。在TDM MIMO FMCW雷达系统中,多天线以时分方式使用,通过交替激活不同的发射天线,实现多目标的高精度检测和参数估计。
FMCW DDM多普勒分复用,DDM同时发射所有Tx波形,并在多普勒域中将它们分离。为了实现波形正交性,对于 第k个发射机,在相邻的chirp中添加多普勒频移,ωk=2π(k-1)/N。其中 N 通常选为 Tx 天线的数量 NTx。DDM 的一个缺点是其无模糊多普勒速度降低到 原来的1/N。
4、雷达测角算法
在得到虚拟阵的数据cube后,可以采用多种方法对目标角度进行估计
Ref:https://www.mdpi.com/2072-4292/16/14/2517
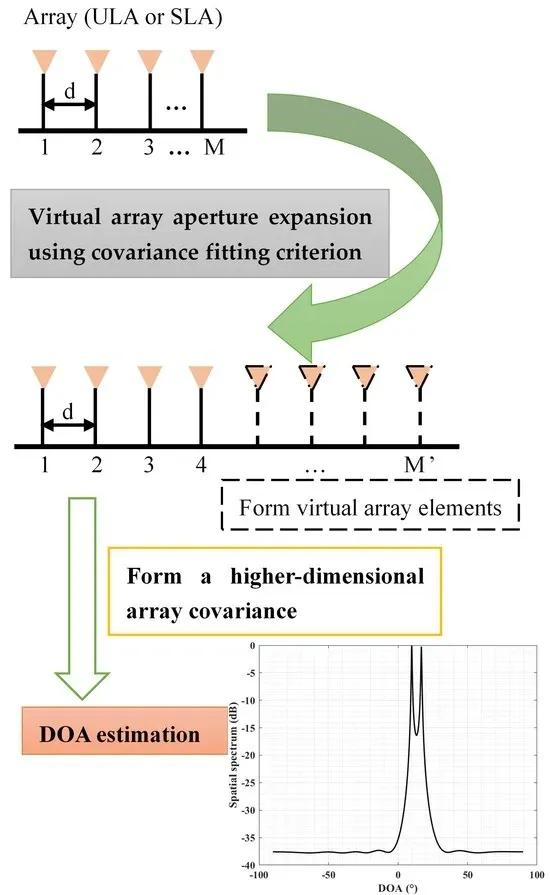 图7 角度估计算法
图7 角度估计算法下文介绍可以作为入门
Ref:https://www.eet-china.com/mp/a123703.html
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
