图一场景描述:漆黑雨夜极限弯道 - 车辆在山区双向单车道行驶,GPS信号弱,正值漆黑雨夜。前方为急速左转弯道。
左侧约束:弯道外侧即为悬崖,无护栏,坠落即致命;
右侧约束:弯道内侧路边为用于排水的深水槽,车轮陷入即失控;
路面条件:路边生长青苔,雨水混合后附着系数μ极低(≈0.3),且存在横向排水坡度;
动态干扰:对向车道有一辆开着远光灯的车辆疾驶交叉而过,造成瞬间致盲眩光。
图二:数据驱动的统计模拟”向“物理规律的本质认知
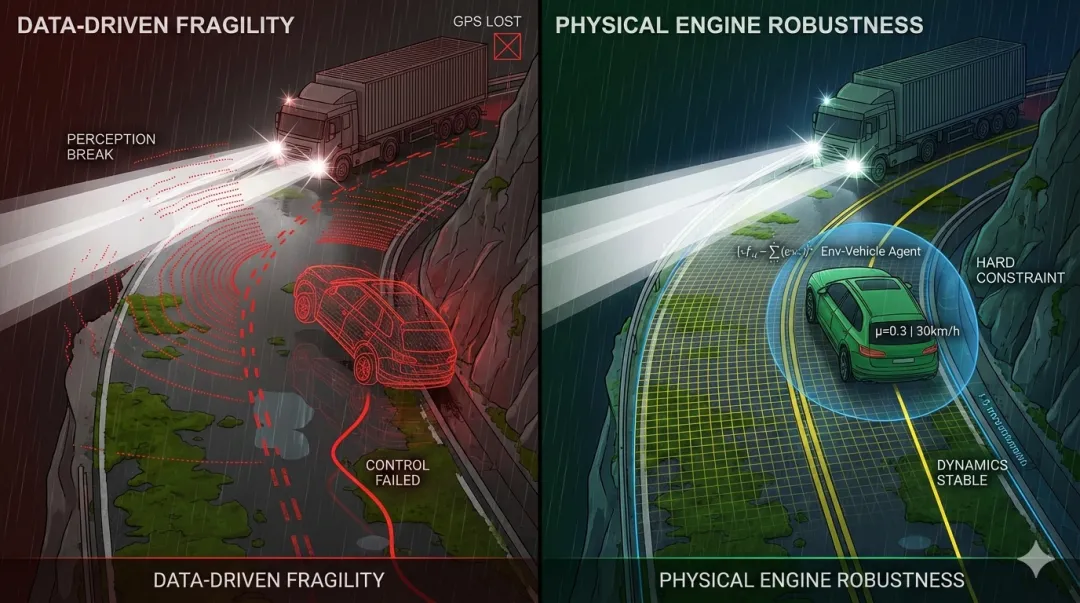
左图展示的Data-Driven的脆弱性,是目前大多数顶流厂商(尤其是纯视觉/深度学习派系)的阿喀琉斯之踵;
右图的“物理引擎鲁棒性”则是自动驾驶行业,需要翻越的下一座大山;
一、基于数据驱动的纯视觉/深度学习派系局限性
以下是对特斯拉、Waymo及国内“华小理”三强的深度解析。
1. 特斯拉FSD
2. Waymo
3. 华为ADS
4. 小鹏 & 理想
二、物理本体论:自动驾驶的“真理之眼”
在2026年的时间节点上,自动驾驶已经从“模仿人类驾驶行为”的阶段,进化到了“理解物理世界规律”的深水区。而物理本体论(Physics-Ontology)的引入,本质上是将AI从一个模仿与概率预测器,叠加上“物理法则+因果推理”,让AI可以真实的“触摸”这个世界。
图二中右侧展示的 “物理引擎鲁棒性”,实际上是将经典力学、动力学方程与深度学习相结合。这种架构相比纯数据驱动,具有以下技术深度:
1. 从“预测概率”到“解物理方程”
在物理本体论下,系统不再仅仅猜测路该怎么走,而是实时计算物理边界:
向心力平衡:
最大静摩擦力约束:
如图二所示,系统明确标注了  和 30km/h。这意味着即使传感器感知模糊,物理引擎也会给出一个“物理硬约束”:在这个曲率和摩擦力下,速度超过 X 必滑出路面。这为AI划定了绝对的安全红线。
和 30km/h。这意味着即使传感器感知模糊,物理引擎也会给出一个“物理硬约束”:在这个曲率和摩擦力下,速度超过 X 必滑出路面。这为AI划定了绝对的安全红线。
2. 环境-车辆智能体(Env-Vehicle Agent)
引入物理本体论后,车辆不再是一个孤立的摄像头盒子,而是一个动力学实体。
3. 世界模型的“逻辑一致性”
数据驱动的模型可能会产生感知中断,例如把一段路看断了。但物理规律具有连续性。基于物理的世界模型(World Model)能根据物体的质量、速度和运动轨迹,在视觉缺失的情况下,依然“计算”出物体在下一秒的物理位置,从而实现真正的鲁棒性。
三、给顶流们,手搓一版Physics-Ontology增强版
3.1. 特斯拉FSD
特斯拉的路径是极致的端到端(End-to-End)。其核心逻辑是通过海量视频数据让神经网络“自悟”出驾驶规则。
原生架构存在的问题:无物理公理、无动力学硬约束、极限工况会出违规动作),纯视觉在深度估计上的不确定性导致运动学本体波动。
维度 | 升级前 (数据驱动驱动) | 升级后 (物理世界模型) |
核心逻辑 | 统计学模仿。基于“人类在此时此地通常怎么开”的概率分布。 | 世界模型预测,神经网络开始理解物体的“永久性”与“动量”。 |
缺陷 | 在图中雨夜等长尾场景,若数据不足,系统会产生“感知幻觉”,将反光误认为障碍物或路面。 | 引入物理连续性约束。系统知道质量为M的物体不可能瞬间消失或改变轨迹。 |
升级后的特斯拉通过引入“生成式模拟”。在图一场景里,即使摄像头被雨水遮挡,系统内部的生成式世界模型, 根据物理惯性,“脑补”出卡车和弯道的后续位置。它不再依赖GPS,而是靠对物体运动矢量的纯物理推演, 来维持导航。
3.2. 华为ADS
3.3 小鹏 & 理想
四、结论
目前的自动驾驶顶流厂商正处于从“统计学驱动”向“物理逻辑驱动”转型的奇点:
“数据驱动”解决的是“常识”问题 (日常通行、高速自驾无忧),而“物理本体论”解决的是“生死”问题。未来的自动驾驶王者,不一定拥有最多的数据,但一定拥有对物理世界模拟最精准的“世界模型”。将感知神经网络作为输入,将物理引擎作为底层的安全栅栏,才是实现 L3/L4/L5 级自动驾驶的终极路径。
附件:彩蛋一枚
## 端到端信号处理链路[传感器] → [感知Agent] → [本体占据流] → [Mesh共识] → [控制指令] → [执行器] ↑ ↑ [物理本体引擎]←→[安全本体校验]##「本体→算法」映射├─感知 → 实体 + 属性├─预测 → 运动学 + 物理可实现约束├─规划 → 动力学 + 安全约束 + 道路约束├─控制 → 执行器动力学 + 舒适约束(Jerk)├─AEB / ACC → 制动距离 + TTC 本体


