火星环境的特殊性为自主驾驶算法带来了多重技术挑战。
首先,地球与火星的单向通信延迟可达 4-24 分钟,实时遥控驾驶完全不可行,传统火星车依赖地面规划的指令驱动,单次驱动距离受限(通常 15-50 米),而毅力号的任务要求平均每日需自主移动 150 米,要求 “毅力号”必须具备独立完成地形感知、路径规划和危险规避的能力。
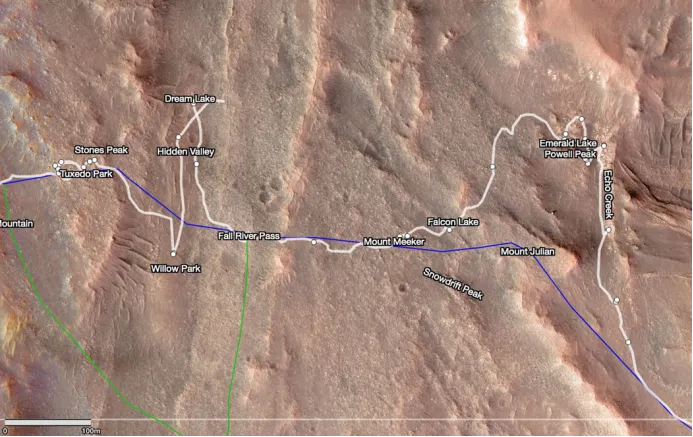
其次,火星表面遍布岩石、沙丘、陡坡等复杂地形,杰泽罗陨石坑(Jezero Crater)作为毅力号的着陆点,其岩石密度远高于此前好奇号(Curiosity)所在的盖尔陨石坑,累计岩石覆盖率最高可达20% 以上,对算法的地形适应性和障碍识别能力提出了更高要求。
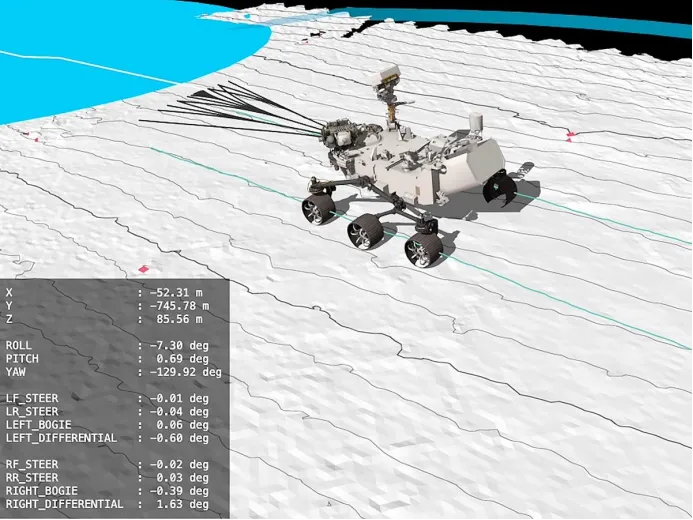
再者,“毅力号”搭载的计算资源极其有限,“毅力号” 采用 133MHz 的单核 RAD750 处理器,同时需承担通信、科学探测等多重任务,留给自主算法的计算资源极为有限。此前好奇号的自主算法因计算耗时过长,平均时速仅 17.3 米,而毅力号需将自主导航时速提升至 90 米以上才能满足任务要求,需在算力约束下实现高效的路径规划与碰撞检测。
针对这些挑战,火星自主驾驶算法需满足三大核心需求:
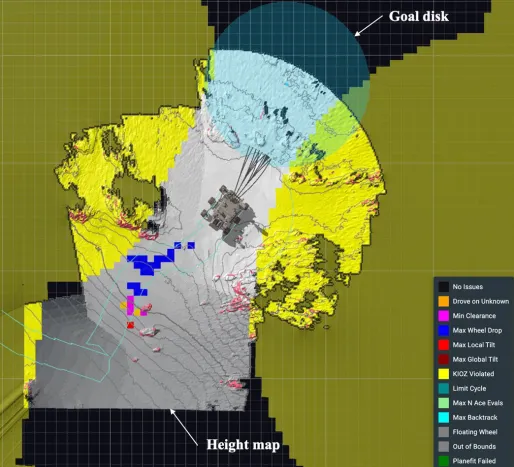
一是安全性,确保“毅力号”在无人工干预的情况下避免碰撞、不超出机械运动极限;
二是效率性,需在复杂地形中规划最优路径,提升日均行驶距离;
三是鲁棒性,能够应对地形不确定性、车轮打滑等突发状况,保持导航稳定性。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
