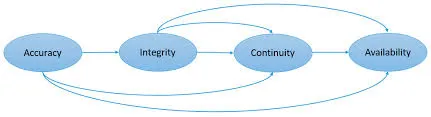
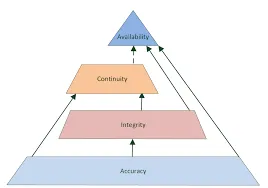
本文系统介绍车载GNSS-连续性 (Continuity)和可用性 (Availability)
在验证自动驾驶软件时,会分别统计 连续性失效次数(每次任务中是否出现定位中断)和 可用性时长(总运行时间中 GNSS 可用的比例),两者共同决定系统的 安全等级 与 商业可行性。
1、GNSS 连续性 vs. 可用性
项目 | 含义 | 关键指标 | 在自动驾驶中的关注点 |
|---|
连续性(Continuity) | 系统在预定操作期间能够 不间断 地提供满足精度、完整性要求的导航信息的能力。
本质上是 在一次完整的驾驶任务(如一次变道、一次泊车或一次 15 s 的紧急规避) 内,GNSS 不出现非计划的中断的概率。 | - 以 概率 表示(如 1 – 8 × 10⁻⁶ / 15 s)
- 常用 连续性时间间隔(CTI)(如 15 s、1 h)
- 与 MTBF(平均故障间隔)关联 | - 关键安全阶段(变道、交叉口通过、紧急制动)必须保证 GNSS 持续可用,否则会导致定位失效、决策错误。
- 连续性要求往往比整体可用性更严格,因为它涉及 短时可靠性。 |
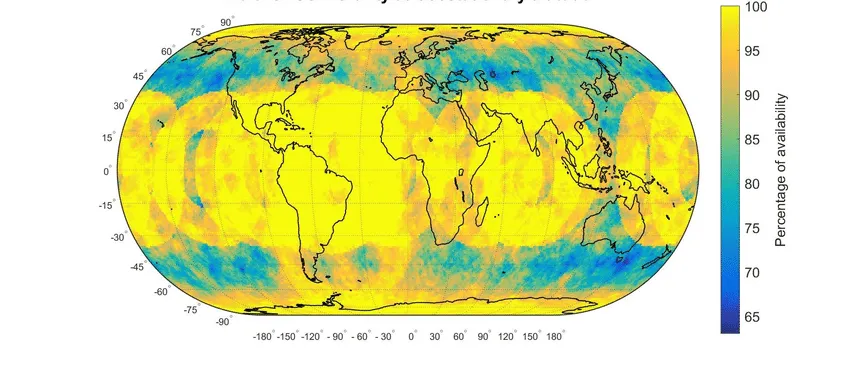
可用性(Availability) | 系统在 计划使用的时间段 内能够向车辆提供 可靠的导航信息 的时间比例。
即 GNSS 在整个运行周期(一天、一个月)中,能够满足定位需求的 时间占比。 | - 以 百分比 表示(如 ≥ 99.9 %)
- 统计 信号可见率、卫星可视度 等指标 | - 影响车辆在城市、郊区、隧道等不同环境下的整体定位覆盖率。
- 高可用性保证车辆在大多数路段都能获得 GNSS 定位,但不一定能保证每一次短时操作都不间断。 |
- 连续性关注的是 短时、单次任务 的不中断性(如 15 s 内不掉链),常用概率描述。
- 可用性关注的是 长期、整体运行 的可用时间比例(如 24 h 中有 23.9 h 可用),用百分比描述。
- 连续性直接关联 安全关键阶段 的可靠性,是 安全‑关键(Safety‑Critical)指标。
- 可用性更多影响 服务质量 与 运营效率,是 可靠性‑总体(Reliability‑Overall)指标。
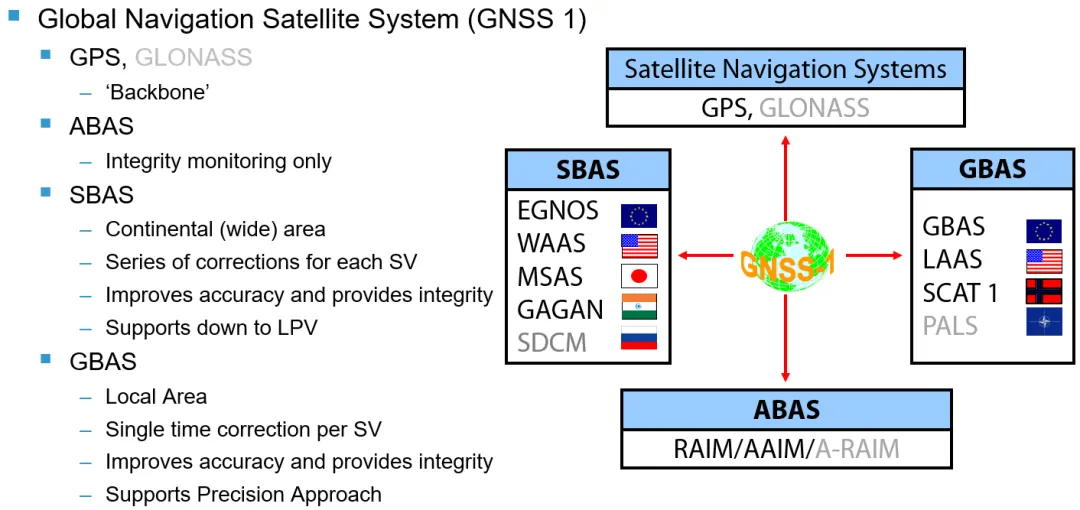
2、GNSS 连续性和可用性保证措施
多星座和多频段的冗余:目前GPS、GLONASS、北斗、Galileo 等 四大星座,如利用GPS L1C/A, L5多频信号,或者BDS B1I, B1C*, B2a多频信号,降低单颗卫星或单频段失效导致的信号中断概率。多星座组合能够在城市峡谷、隧道入口等视野受限的环境中保持更高的可见卫星数,提升 可用性 与 连续性。
差分/增强服务(RTK、SBAS、PPP‑RTK):RTK(实时动态定位) 通过基准站或网络基准(如 EGNOS、MSAS、BDS B1C)提供亚米甚至 厘米级 的相对定位。PPP‑RTK 与 SBAS 结合,可在无基准站的地区仍保持高精度并提供 完整性/连续性监控(如 RAIM、RAIM‑FDE)。
高精度 惯性测量单元(IMU) 与 GNSS 融合,在 GNSS 信号暂时失效(如隧道、遮挡)时通过 惯性推算 维持定位,随后在信号恢复后快速 重新对齐(整数模糊度恢复)。零速更新(ZUPT)在车辆停止时提供强制校正,显著降低累计漂移。
LiDAR / 摄像头 + 高精度地图(SLAM)融合:将 LiDAR 里程计(LO) 与 3D 高精度地图(Map‑Based Global Localization, MGL)结合,实现 基于地图的绝对定位,即使 GNSS 完全被遮挡也能得到可靠位姿。融合后通过 图优化(Factor Graph)把 GNSS、LO、IMU、地图约束统一求解,能够在 GNSS 可用性下降时仍保持 100% 连续定位,定位误差提升约 50%。
RAIM(Receiver Autonomous Integrity Monitoring)、RAIM‑FDE、RAIM‑V 等自主完整性监测在检测到异常测量或卫星故障时及时发出 警报,防止错误位置信息进入决策层。连续性风险(LOC)通过 滑动窗口 统计失效事件概率,满足航空/陆地交通的 1‑8×10⁻⁶ / 15 s 连续性要求。完整性监测(RAIM)实时评估 GNSS 解算的可信度,发现异常立即切换至备份方案。
Ref:https://www.unicorecomm.com/products/detail/59
Ref:https://gssc.esa.int/navipedia/index.php/Continuity
3、自动驾驶中的实例
- 传感器融合:当 GNSS 连续性出现短暂中断时,车辆会依赖惯性测量单元(IMU)或视觉里程计进行短时定位补偿;但如果整体可用性低(如长期信号遮挡),系统必须切换到 非 GNSS 的定位方案(如 SLAM)才能继续行驶。
- 冗余设计:为提升 连续性,自动驾驶平台常采用 多星座(GPS + 北斗 + GLONASS + Galileo)接收机;为提升 可用性,则在城市峡谷或隧道中加入 RTK/PPP、基站辅助 或 车联网定位。

