轻舟智航(QCraft)作为具备 Waymo 基因的自动驾驶领军企业,通过「L2 + 量产规模化 + L4 技术前瞻」双擎战略,实现了从技术独角兽到量产领军者的转型。研究表明:轻舟智航通过超融合感知算法、安全可解释决策系统及跨平台适配能力,在128TOPS 算力平台(征程 6M)实现城市NOA 功能,算法负载优化率较行业平均水平高15%-20%,构建了 “技术先进性 - 工程量产性 - 安全合规性” 三位一体的核心竞争力。
01#
轻舟智航技术基因与战略架构
“双擎” 战略协同机制
轻舟智航采用「L2 + 量产引擎 + L4 创新引擎」双轮驱动战略:
量产引擎:以乘用车高阶辅助驾驶(行泊一体、NOA)为核心,通过规模化交付积累海量真实路况数据;
创新引擎:聚焦L4 级 Robotaxi/Robobus 技术研发,探索长尾场景处理与端到端决策;
协同逻辑:L2 + 量产车辆采集的真实数据通过数据闭环反哺 L4 算法训练,实现 “技术迭代 - 场景覆盖 - 数据积累” 的正向循环。
02#
核心技术架构深度解析
1、多模态融合方案
轻舟智航基于BEV 范式构建OmniNet 超融合感知大模型,实现视觉、激光雷达、毫米波雷达的端到端联合建模,其核心创新在于打破传感器模态壁垒,通过统一神经网络完成多源数据的特征级融合与任务输出:
极简配置(6V1R):仅支持高速NOA 功能,依赖弱监督单目 3D 检测技术;
高阶配置(城市NOA):方案一(双征程5):11 颗高清相机 + 1 颗禾赛 AT128 激光雷达(Yole Group 2026 激光雷达市占率第一)+5 颗毫米波雷达,双芯片协同算力 256TOPS,单芯片功耗30W;方案二(单征程6M):11 颗高清相机 + 1 颗激光雷达,单芯片算力 128TOPS,2026 年首发搭载于理想 L 系列焕新版
传感器同步机制:采用时间戳硬同步+ 数据缓存对齐策略,相机与激光雷达的时间同步误差≤10μs,满足 ISO 20077-1 车规要求。
PillarNeXt 模型架构:
OmniNet 跨模态融合机制:
长尾场景处理工程化实现:
2、视觉主导的低成本方案
弱监督单目3D 检测技术:
约束条件:基于多视图几何一致性(相邻相机投影误差≤1 像素)和运动parallax 约束,通过无监督学习生成伪3D 标注;
标注成本优化:仅需10% 的人工标注数据即可训练模型,标注效率提升 9 倍,单帧标注成本从 2.3 元降至 0.25 元;
性能指标:在高速场景下,车辆检测AP(moderate)≥82%,距离误差≤0.8m,速度估计误差≤1.2km/h,满足高速 NOA 功能要求。
6V1R 方案工程化难点突破:
近距盲区补盲:通过后视相机与毫米波雷达的交叉验证,解决车辆正后方3m 内障碍物检测盲区;
光照鲁棒性优化:采用Retinex 增强算法 + 自适应曝光控制,在逆光场景下的目标对比度提升 40%;
算力适配:模型量化为INT8 精度后,在征程 5 芯片 BPU 上的推理耗时≤18ms,满足 100TOPS 以下算力约束。
3、高效运动预测模型(ProphNet 深度解析)
输入层:融合感知特征(256 维)、高精地图特征(128 维)、历史轨迹(50 帧 ×6 维),总输入维度 442 维;
锚点生成层:基于交通规则生成128 个候选轨迹锚点(覆盖直行、转弯、变道等 8 类基础行为);
注意力预测头:采用时空自注意力机制(Temporal-Spatial Attention),建模交通参与者间的交互关系(如跟车、会车场景)
多模态输出层:通过高斯混合模型(GMM)输出 5 条概率最高的预测轨迹,覆盖 95% 以上真实运动场景。
动态推理精度调节:根据场景复杂度自适应切换模型精度(简单场景用
INT8 量化模型,复杂场景用 FP16 模型);
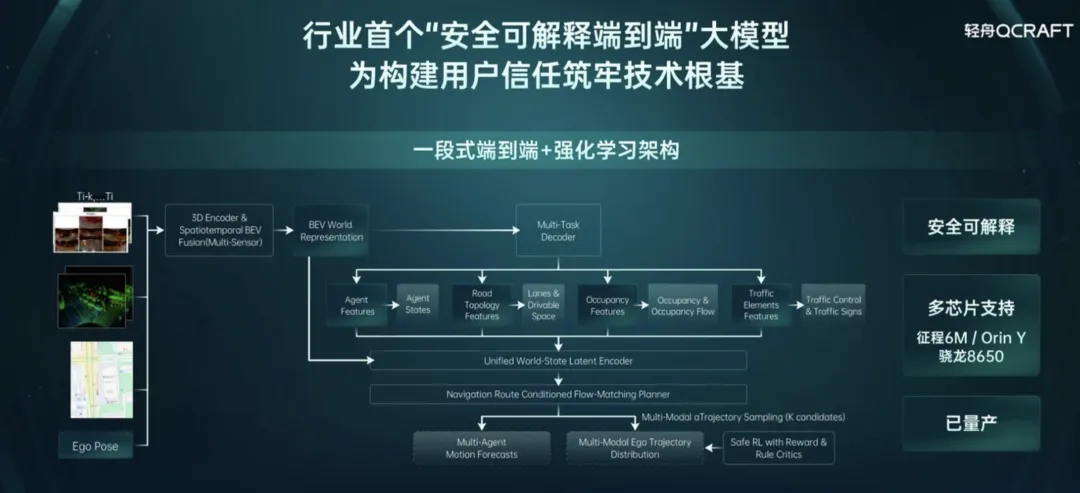
4、安全可解释决策框架(端到端落地细节)
One-Model 端到端架构:
输入:BEV 特征图(512×512×256)+ 导航路径信息;
中间表征层(安全可解释核心):场景状态编码:输出32 维场景风险向量(含碰撞概率、车道合规性等指标);约束条件显式输出:明确列出当前帧的安全边界(如最小安全距离、最大转向角);
输出:连续控制指令(车速、方向盘角度)+ 决策逻辑标签(如 “因施工占道向左变道”)。
核心优势:模型参数从传统模块化方案的200M + 精简至 80M,系统延迟从 150ms 降至 85ms,CPU 占用率降低 40%。
ISO 26262 合规设计:
硬约束嵌入:在模型训练中加入安全规则损失函数(如不得跨越双黄线、限速范围内行驶);
决策追溯机制:每帧决策结果关联3 类可审计数据(感知输入、中间状态、约束条件),满足 ASIL D 级别的可追溯性要求;
容错机制:采用“主决策 + 备份决策” 双路径架构,主决策失效时 0.5ms 内切换至基于规则的备份决策。
5、“轻舟矩阵” 工具链技术细节
数据采集子系统:
自动标注子系统:
仿真测试子系统:
场景生成:支持参数化场景生成(如调整车流量、天气条件),日均生成10 万 + 测试场景;
虚实融合:采用数字孪生技术,将真实道路的点云数据嵌入仿真场景,仿真与实车测试结果一致性≥90%;
硬件在环(HIL)测试:支持征程 5/6 芯片的实时硬件仿真,单场景测试时间从 2 小时缩短至 15 分钟。
6、跨平台适配技术(芯片级优化)
自研异构加速算子:
周级迭代工程化实现:
模型训练并行化:采用分布式训练框架,支持100+GPU 同时训练,单模型训练时间从 72 小时缩短至 12 小时;
OTA 部署策略:采用增量更新技术,模型更新包体积从 2GB 压缩至 500MB,用户下载时间缩短 80%;
量产数据反哺机制:百万台量产车每月贡献10 亿 + 公里行驶数据,其中 1%(1000 万 + 公里)为长尾场景数据,用于模型迭代优化。
7、VLA + 世界模型统一架构(2026 最新技术)
VLA(Vision-Language-Action)融合:
世界模型预测能力:
动态场景推演:基于物理规则和历史数据,预测未来3 秒内的场景变化(如行人横穿马路、车辆加塞);
泛化能力:通过10 万 + 场景的强化学习,模型在未见过的长尾场景(如无人机占道、道路塌陷)中决策成功率≥85%;
工程化落地:当前已集成至“轻舟乘风 MAX” 方案(500TOPS 算力),2026 年 Q3 将通过 OTA 向量产车型推送。
03#
结论与展望
轻舟智航通过「全栈自研技术架构+ 双擎协同战略 + 严格安全体系」,成功实现了自动驾驶技术的规模化量产落地,其 40 万台交付数据与 ASIL D 认证证明了方案的可靠性与合规性。未来,随着世界模型(World Model)与 VLA 技术的进一步研发应用,其在长尾场景处理与通用智能落地方面的竞争力将持续提升。
自动驾驶产业的发展需要技术创新与工程落地的平衡,轻舟智航的实践为行业提供了“从实验室到量产车” 的可行路径,其 “安全惟先、行稳致远” 的发展理念,或将推动智能驾驶行业向更高效、更安全的方向演进。
[1] 轻舟智航。轻舟智航发展历程与技术白皮书 [EB/OL]. https://www.qcraft.ai/story, 2026-02-03.
[2] BitAuto. 轻舟智航获 ISO 26262 ASIL D 流程认证 [EB/OL]. 2025-05-21.
[3] QCraft. 三篇论文同时入选 CVPR,前沿创新引领轻舟产品 [EB/OL]. 2023-03-13.
[4] 盖世汽车研究院. 2025 年中国 L2 + 辅助驾驶量产市场报告 [R]. 2025.
资料来源于网络整理,如有侵权即删,请联系小编
扫描下方二维码,添加智驾派小助理微信,免费领取以下材料