在机器人导航、自动驾驶这些领域,轨迹规划一直是核心难题。想象一下,让自动驾驶汽车既要精准到达目的地,又要全程避开障碍物,还得满足“在某个时间段内经过指定区域”这类复杂要求,传统方法要么算得慢,要么容易出错。最近,ICRA 2025上一篇关于轨迹规划的论文,给出了一套超高效的解决方案,今天就带大家搞懂这个能让机器人“聪明规划”的新方法。
论文信息
题目: Trajectory Planning with Signal Temporal Logic Costs using Deterministic Path Integral Optimization
基于确定性路径积分优化的信号时序逻辑代价轨迹规划
作者: Patrick Halder, Hannes Homburger, Lothar Kiltz, Johannes Reuter, Matthias Althoff
先搞懂:为啥传统轨迹规划不好用?
咱们先说说现状。想要让机器人、自动驾驶车按要求运动,得先把“要做什么、不能做什么”说清楚。信号时序逻辑(STL)就是干这个的——它能精准定义各种时空规则,比如“全程避开障碍物”“最终到达目标区域”“在10秒内经过指定路口”。
但问题来了:
- 这些规则一旦复杂起来,比如又要避障又要按顺序经过多个区域,传统方法会出现“组合爆炸”,计算量呈指数级增长;
- STL的核心计算指标(鲁棒性)存在不可微分、非凸的特点,基于梯度的优化方法要么得修改原始问题,要么算出来的结果不准;
- 就算是一些采样类方法,也容易收敛慢,没法满足实时控制的需求。
简单说,传统方法要么算得慢,要么算不准,面对复杂任务根本扛不住。
核心突破:确定性路径积分优化,搞定STL代价难题
这篇论文最核心的创新,就是把模型预测路径积分(MPPI)控制框架,和STL代价结合起来,搞出了一套全新的轨迹规划方法。咱们不用懂复杂公式,就看它到底牛在哪:
创新点1:不用平滑近似,直接处理STL的“硬茬”
STL的鲁棒性度量是个“刺头”——不可微分、非凸,传统方法要么绕着走,要么把它“磨平”(平滑处理)再计算,结果自然会有偏差。
这篇论文的方法不搞这些花活,直接把STL鲁棒性度量当成代价函数的一部分,融入MPPI框架。不用修改原始问题,也不用做近似,从根源上保证了计算的准确性。
创新点2:状态增广+方差缩减,从“随机”到“精准”
MPPI原本是随机采样的方法,直接用会有偏差,没法得到确定性问题的精确解。作者想出了两个关键招:
- 状态增广:把机器人过去的状态信息都纳入当前状态里,解决了STL代价依赖完整轨迹的问题;
- 方差渐进缩减:迭代减小采样分布的方差和逆温度参数,让随机采样的结果慢慢收敛到确定性问题的精确解,彻底克服了标准MPPI的偏差问题。
创新点3:并行计算+提前终止,适配实时场景
这套方法继承了MPPI天然的并行性优势——能同时采样、评估大量轨迹,计算效率直接拉满。更贴心的是,算法支持“提前终止”,就算没算到最后,中间得到的解也能用,特别适合自动驾驶、机器人实时控制这类对时间敏感的场景。
方法总览:一步步找到最优轨迹
咱们用通俗的话拆解下算法的核心流程(对应论文里的算法1和图1):
- 先把原始的STL最优控制问题,通过“状态增广”转换成MPPI能处理的标准形式;
- 每次迭代都采样大量轨迹,计算每条轨迹的代价(包括STL约束的满足程度);
- 迭代到一定次数,就得到满足所有STL约束的最优轨迹。
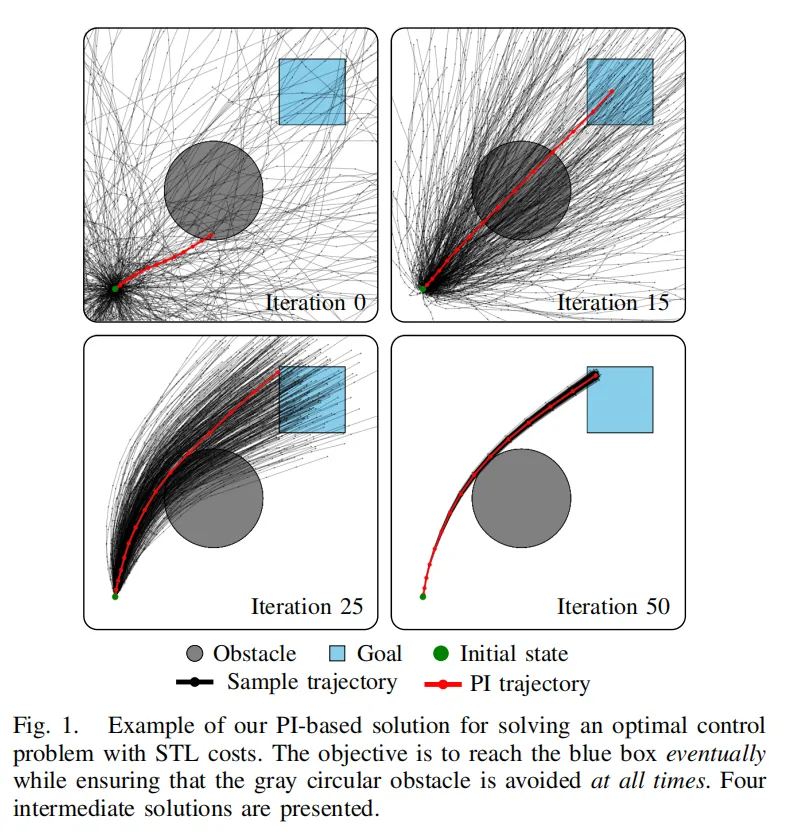 (图1:基于PI的解决方案示例,目标是最终到达蓝色方框,同时始终避开灰色圆形障碍物。能清晰看到四个中间解的迭代过程,方差慢慢缩小,轨迹越来越精准)
(图1:基于PI的解决方案示例,目标是最终到达蓝色方框,同时始终避开灰色圆形障碍物。能清晰看到四个中间解的迭代过程,方差慢慢缩小,轨迹越来越精准)
实测见真章:三个难题,吊打传统方法
作者做了三个不同复杂度的实验,把新方法(PI)和混合整数规划(MIP)、梯度法(GRAD)、平滑梯度法(SGRAD)、进化策略(CMA-ES)这些主流方法比了个遍,结果超亮眼。
实验1:标量积分器——简单场景验证有效性
第一个实验是让一个简单的积分器系统,在10个时间步内最大化最终位置,同时要至少两个时间步状态低于1。
结果显示:除了GRAD方法,其他方法都能满足约束,但PI方法的收敛速度更快,计算时间远低于MIP这类方法。
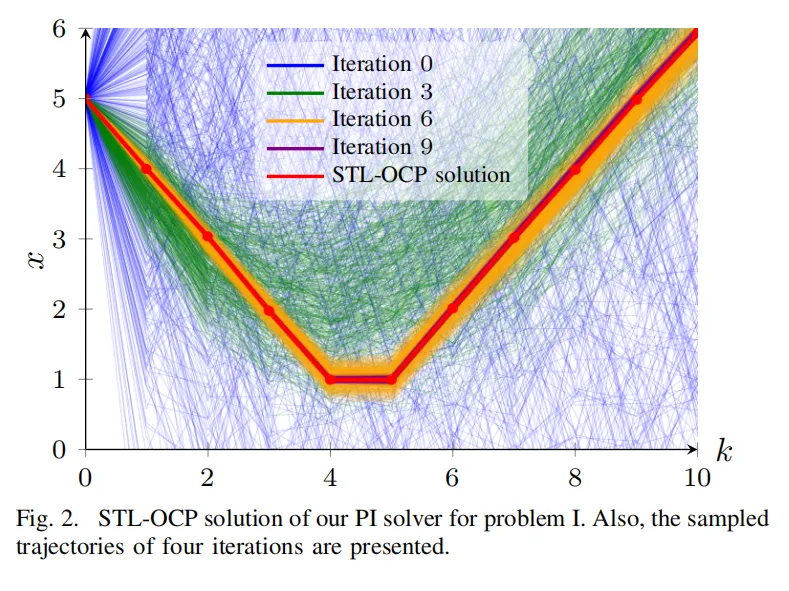 (图2:PI求解器针对这个问题的解,能看到四次迭代的采样轨迹——随着迭代次数增加,采样的方差越来越小,轨迹最终收敛到最优解,完美满足“至少两个时间步低于1+最大化最终位置”的要求)
(图2:PI求解器针对这个问题的解,能看到四次迭代的采样轨迹——随着迭代次数增加,采样的方差越来越小,轨迹最终收敛到最优解,完美满足“至少两个时间步低于1+最大化最终位置”的要求)
实验2:简单运动规划——避障+到达目标
第二个实验是双积分器系统的运动规划:要在15个时间步内到达蓝色矩形区域,同时全程避开灰色圆形障碍物。
结果:所有方法都能满足约束,但PI方法的收敛时间是最短的。CMA-ES因为要在两个最优解里做选择,计算时间明显变长;GRAD和SGRAD因为要处理非线性的避障约束,速度也远不如PI。
实验3:复杂车辆模型——多约束高难度任务
第三个实验最能体现实力:用复杂的车辆单轨模型,规划50个时间步的轨迹,要求包括:
结果让人大吃一惊:
- PI方法只用了25.07秒就收敛,CMA-ES用了79.82秒;
- MIP、GRAD、SGRAD这些方法,在1小时的时间限制内,根本没算出可行解!
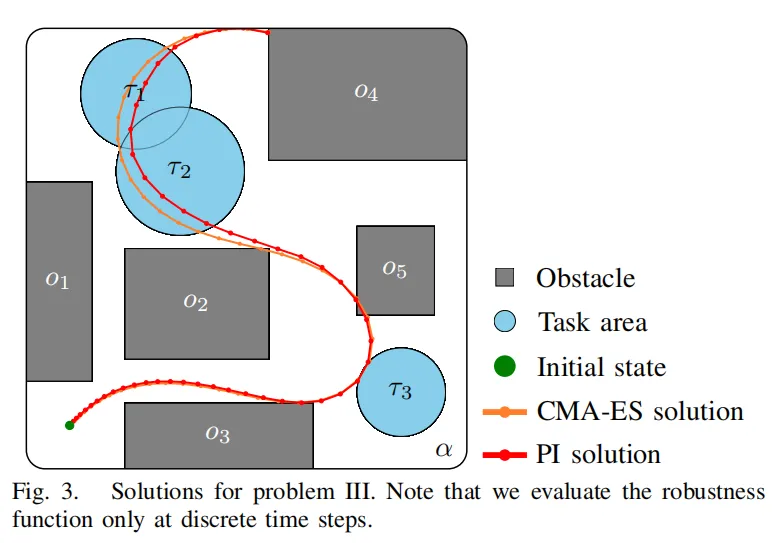 (图3:PI方法给出的复杂车辆模型轨迹解。能清楚看到车辆避开了所有障碍物,依次经过了三个任务区域,全程待在指定范围内,完美满足所有复杂的STL约束)
(图3:PI方法给出的复杂车辆模型轨迹解。能清楚看到车辆避开了所有障碍物,依次经过了三个任务区域,全程待在指定范围内,完美满足所有复杂的STL约束)
总结:不止于轨迹规划,未来潜力无限
这篇论文的价值,不只是提出了一个高效的轨迹规划方法,更重要的是解决了STL约束下最优控制的核心痛点:
- 不用修改原始问题,直接处理不可微分、非凸的STL代价;
未来,作者还计划把这套方法扩展到带优先级的STL规范,以及模型预测控制场景中。相信在自动驾驶、机器人导航、无人机控制这些领域,这套方法会成为解决复杂时空约束规划问题的“利器”。
最后提一句,论文的代码已经开源,感兴趣的小伙伴可以去看看。毕竟在实际应用中,能又快又准地搞定复杂轨迹规划,才是真的能落地、有价值的技术。


