自动驾驶的玩法变了,但问题也变了
2019年之前,自动驾驶行业的开发范式很清晰:感知→预测→规划→控制,每个模块独立开发、独立测试。出了问题,定位到某个模块,打补丁、调规则。
这套方法论来自一个关键前提——模块之间有"硬编码接口",每个模块的输入输出是可枚举的、确定的。
也正因如此,ISO 26262功能安全标准才能生效:每个模块的失效模式可以被穷举,可以做FMEA,安全边界用规则画出来。
然后Transformer来了,Foundation Model来了,整个前提被动摇了。
01|当自动驾驶开始用"常识"开车,功能安全第一次失去了锚点
AI正在渗透进感知、规划等子模块,模块性能提升了,但安全性和可解释性的问题随之浮出水面——而当架构走向完全端到端时,这个矛盾只会更激烈,因为模块化的验证层和可解释层都不存在了。
端到端架构背后的技术推力,是Foundation Model(基础模型)在自动驾驶领域的迁移。基础模型在语言和视觉领域展现出了"惊人的性能"(tremendous performance),同时也为场景工程(Scenario Engineering)带来了新机遇——但也带来了新的挑战:
问题一:开放世界——长尾分布永远填不完
真实世界的驾驶场景,从高频常规场景到极端Corner Case,再到完全前所未有的场景,构成了一个开放的长尾分布。
日常通勤场景可以被数据覆盖,但那些"日常生活中人类能处理、但自动驾驶会卡住"的情况——施工路段的水泥隔离墩、急救车需要让道但系统无法识别、复杂路况中突然出现的行人——这些构成了一个永远无法被穷举覆盖的分布。
这些问题,靠"扩大数据集"解决不了——因为它们本质上不是"数量不够",而是"种类不可枚举"。
问题二:端到端更脆弱——对分布偏移更敏感
模块化架构里,每个模块独立处理输入,如果某个感知场景超出模型范围,只有感知模块出错,出错范围是局部的。
端到端架构里,感知和规划是一个联合模型——输入偏移会导致整个决策链一起偏移,而且是非线性的偏移:模型不会说"我不确定",而是会给出一个基于训练分布的"自信输出",这个输出可能在常规场景下完全正确,在偏移场景下完全错误,却没有内部机制能检测到这个错误。
问题三:ISO 26262 / SOTIF 标准框架失锚
这是最根本的问题。
功能安全标准ISO 26262建立在"穷举失效模式"的方法论上。规则系统的失效路径是可枚举的,可以逐条做FMEA,逐条设计安全机制。
端到端模型是连续函数,失效不是"这条规则错了",而是:"这个高维输入落在了训练分布之外的区域,输出产生了系统性偏移"。
问题四:模块化边界的"循环依赖"问题
随着端到端系统引入注意力机制和双向信息流,模块之间的依赖关系变得循环了。
当感知依赖规划、规划依赖预测、预测又依赖感知时,独立模块的安全验证就失效了——因为一个模块的输出已经不再独立于另一个模块的状态。
这也意味着:即使保留两段式架构的形式,端到端的数据驱动特性也会瓦解模块化安全验证的基础。
02|SO-M-E2E:德国学者提出的"保守解法"
面对上述困局,FAU和乌尔姆大学的研究者提出了SO-M-E2E架构(Service-Oriented Modular End-to-End)。
核心设计:
SO(面向服务):保留模块化架构的可测试性,通过硬编码接口独立保障每个服务
M(模块化):感知、预测、规划等功能独立但协同,不是彻底的黑箱
E2E(端到端):各模块之间用注意力机制动态编排,信息流向由数据驱动而非硬编码规则
关键创新:Attention-based Orchestrator(注意力编排器)
用注意力机制动态决定信息流向哪些模块。遇到未知场景时,系统可以自适应组合已知能力,而不是直接崩溃。
但SO-M-E2E的局限也很明显:
论文本身也承认了这一点——模块化架构天然地给"性能上限"设置了天花板:每个模块的输出经过下一个模块的处理,是逐步精化的过程(refinement),模块边界既是安全的护栏,也是性能的瓶颈。
简单说:SO-M-E2E提升了安全下限,但锁死了性能上限。
03|行业还是选择了端到端——因为性能差距太明显了
尽管功能安全挑战重重,行业主流还是坚定地走向了端到端/VLA路线。
原因很直接:性能差距是量级上的,不是细节上的。
Tesla FSD v12用端到端模型替代了超过30万行C++规则代码,在常规场景下的通行效率和舒适度远超模块化方案。
行业已经用脚投票:端到端是性能最优解,这一点没有争议。
真正的分歧在于:如何在端到端的高性能下,保证功能安全?
04|答案:Guardian Angel——给AI装一个"安全兜底"
功能安全研究者想出了一个很优雅的思路:不要消灭端到端,而是给端到端加一个永远在线的安全守护层。
这就是Guardian Angel(守护天使)架构,也被称为Parallel Planning / Fail-Safe Hybrid Architecture。
核心逻辑:
这解决了一个根本矛盾:
端到端负责"把车开好",安全规则负责"保证不开出安全边界"——两者各司其职,安全层不需要理解端到端在做什么,只需要判断"这个输出有没有超出安全边界"。
于是功能安全验证重新变成可能:
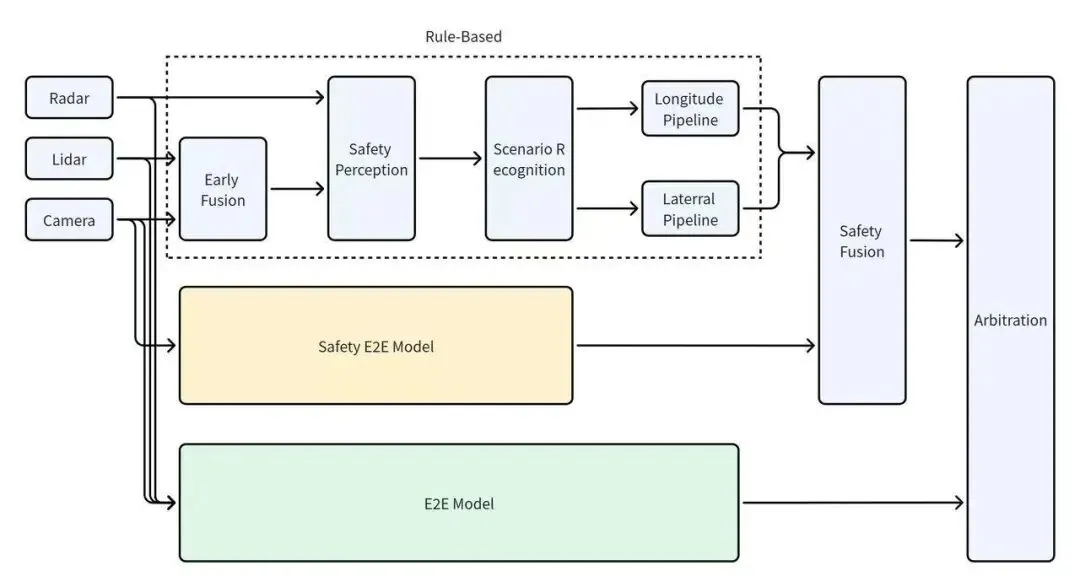
05|元戎启行的 Guardian Angel 实践
元戎启行采用了双保险,一个是Safety E2E,外加一个基于规则的通道。
Safety E2E Model输出的不是分类决策,而是完整的3D轨迹——包含未来每一时刻的位置、速度、加速度。
通道 | 本质角色 | 输出 |
|---|
规则通道 | 安全约束发生器 | 连续的安全边界 |
E2E通道 | 舒适轨迹生成器 | 统计意义上的人类驾驶轨迹 |
Safety Fusion | 约束内优化 | E2E轨迹在安全边界内保持舒适 |
Arbitration | 最终兜底 | 轨迹级安全否决权 |
工程难点:
仲裁器延迟:两个通道输出时间戳必须精确对齐
安全层误触发:频繁否决导致系统性能退化
极端场景定义:什么算"端到端无法处理",需要大量实车数据标定
写在最后
端到端给了自动驾驶性能,Guardian Angel给了它功能安全的可能性。
这两件事,并不矛盾。
行业真正在摸索的,是如何在保证功能安全的前提下,把端到端的性能上限全部释放出来——
Guardian Angel 的工程落地,是大规模商业化的最后一把钥匙。
参考文献:Ullrich, L. et al. "Toward Fully Autonomous Driving: AI, Challenges, Opportunities, and Needs," IEEE Access, 2026 (arXiv:2601.22927);元戎启行AEB量产方案工程实践
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
