本文来源:智车科技 深蓝AI大讲堂
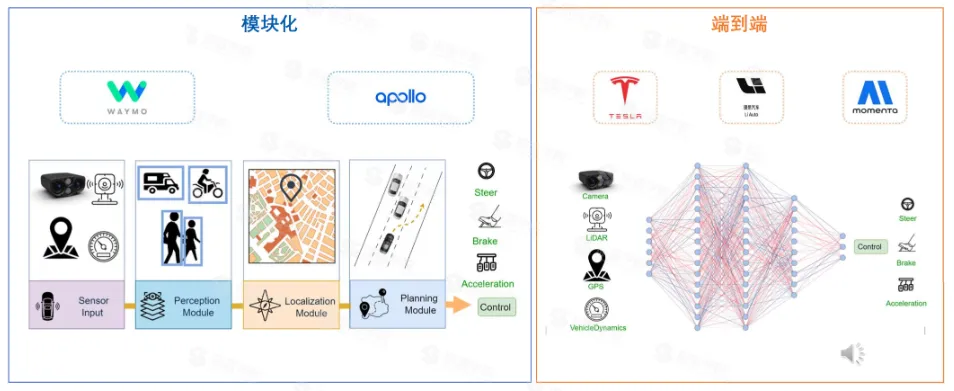
自动驾驶技术从模块化向端到端的演进。传统模块化架构将感知、预测、规划和控制等子任务拆分开;端到端则将各个模块化简到一个神经网络,直接从传感器获取数据,并映射到车辆控制指令上,实现联合优化。
从特斯拉开始,各家智驾公司都开始了端到端的量产工作,掌握端到端感知、规划全链路技术的从业者具备极强的职业竞争力。但从技术角度来看,端到端融合了Transformer、Difusion、VLA、世界模型等前沿A技术与自动驾驶工程实践,从业者也面临着更多挑战。
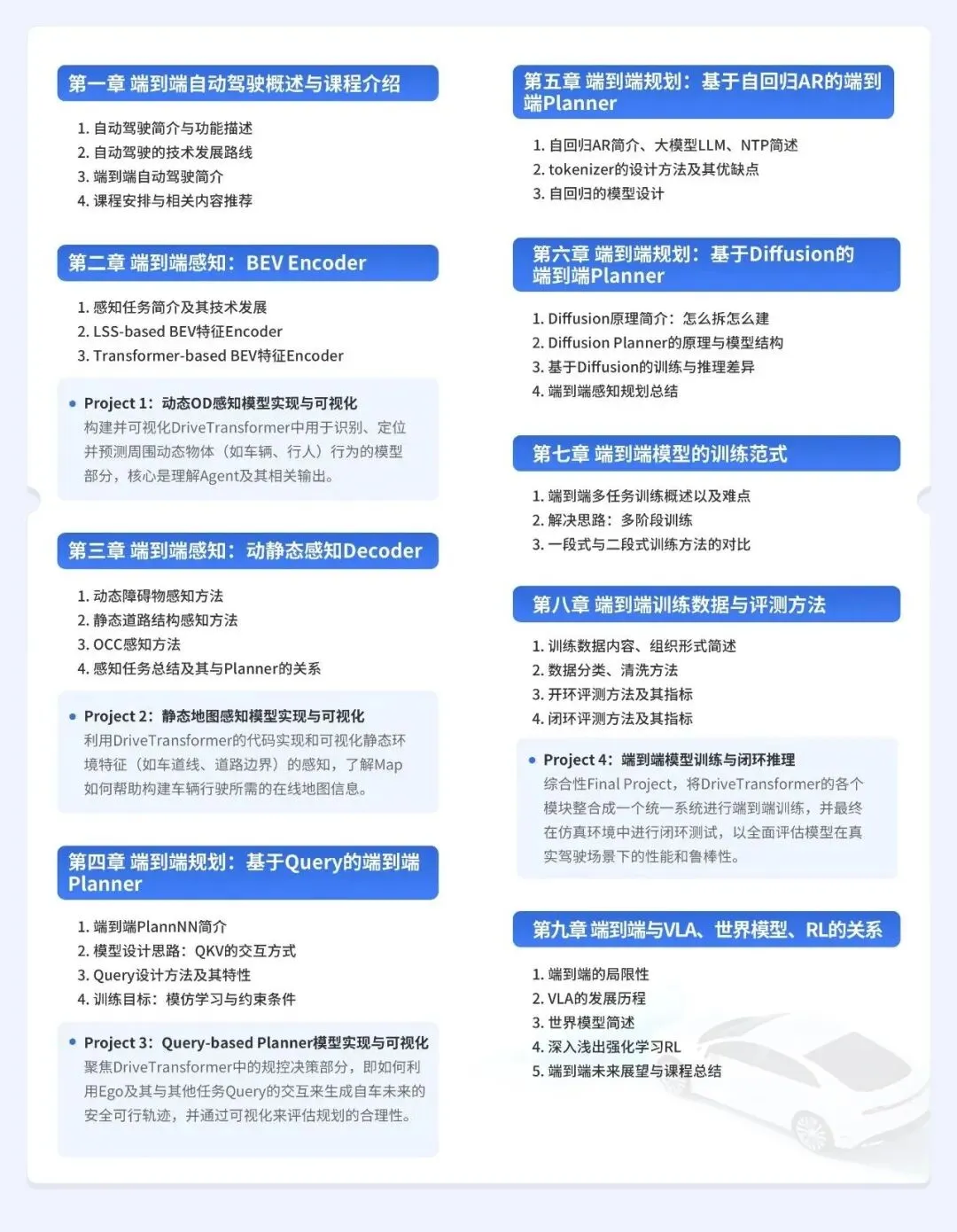
为此,深蓝学院、智车科技开设了《端到端自动驾驶理论与实践》课程,旨在帮助学习者构建端到端自动驾驶的完整知识体系,通过四个层层递进的实践项目,实现从“模块化思维”到“端到端系统思维”的升级,抓住自动驾驶技术迭代的核心机遇。
完整项目demo:基于DriveTransformer框架的可视化展示

课程导师
毕业于清华大学计算机系,深耕自动驾驶领域将近十年,兼具前沿技术探索与量产交付落地经验。先后任职于 Momenta、阿里达摩院、百度 Apollo 等行业标杆机构,核心聚焦自动驾驶感知、端到端规划、VLA(视觉-语言-动作)等关键领域。主导多项核心技术研发,推动BEV、OCC、端到端感知、端到端规划等技术升级,探索VLA、RL等前沿技术在自动驾驶领域的应用,成果落地于 Robotaix、无人物流车、智能辅助驾驶等场景。
1.体系化知识框架:贴合行业技术迭代节奏,构建端到端自动驾驶全链路知识框架,覆盖BEV Encoder/Decoder、动静态感知任务、Query-based/自回归AR/Diffusion三大nnPlanner范式等核心技术,囊括了模型、训练、数据、评测等研发全流程。
2.理论与实践结合:摒弃纯理论讲解,每个核心模块配套“原理拆解+模型设计+代码讲解”三步教学,从论文思路到代码实现逐步解析Transformer、BEV、Diffusion等关键算法的设计、实现与落地要点,学完可上手搭建端到端核心模块。
3.衔接行业新前沿:课程内容衔接VLA、世界模型、强化学习等前沿方向,建立新技术在自动驾驶领域的落地逻辑,匹配行业长期发展需求,提升职业竞争力。
4.三师助力讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。
5.定期班会助教1V1批改作业,并在班会中进行讲评和指导;在班会中,学习更多技巧;在交流中收获更多思路。