OpenSCENARIO 是 ASAM 推出的开放标准,用于描述自动驾驶、辅助驾驶和交通仿真中的动态场景。简单说,它不是仿真软件,也不是渲染引擎,而是一种“场景剧本格式”:它规定在某个道路环境中,哪些车辆、行人、交通灯、天气条件、触发事件和行为动作应该如何发生。其核心作用是让不同仿真平台、测试工具和车企之间能够用统一方式描述、交换和复现实验场景。ASAM 官方将其定位为驾驶仿真应用中动态内容的描述标准,主要用于 ADAS、自动驾驶和自主车辆的虚拟开发、测试与验证。
1. 测试场景可复现
很多人一听仿真,就先想到 3D 场景、传感器渲染、逼真光照、车流画面。但 OpenSCENARIO 关心的重点不是“画得像不像”,而是测试事件是否被准确描述。
例如,一个典型自动驾驶测试场景可能是:
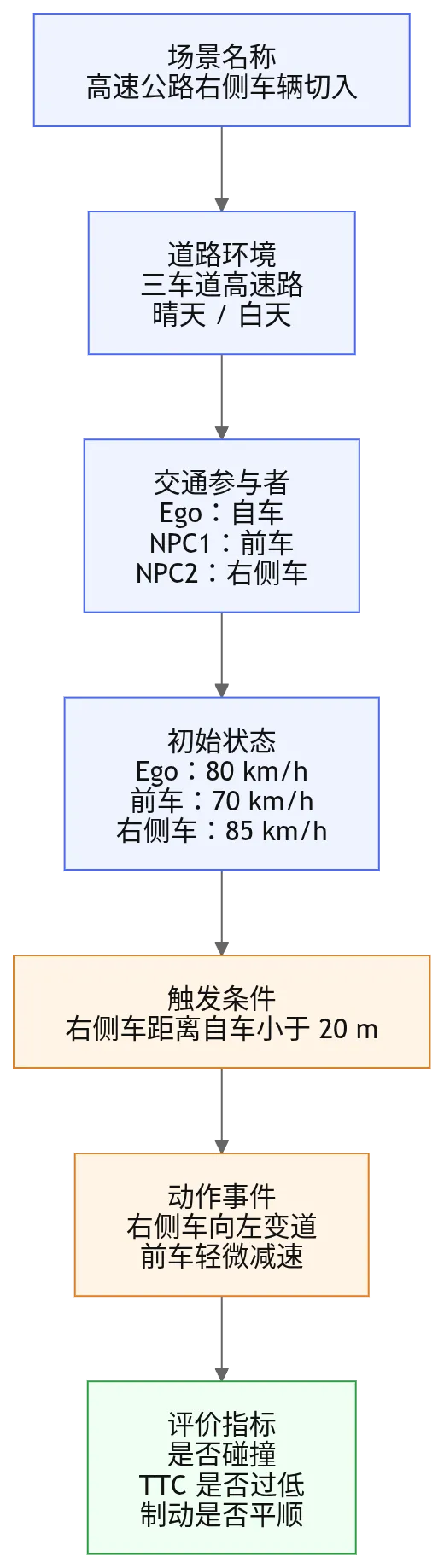
一辆自车以 80 km/h 在高速公路中间车道行驶,前方车辆突然减速,右侧车辆并线切入,自车需要判断是否制动、换道或保持车道(语义描述)。这个场景里真正重要的不是建筑材质多精细,而是车辆初始位置、速度、触发条件、变道动作、制动行为、时间关系和评价指标(量化描述)。
OpenSCENARIO 就是用来描述这些内容的。它可以定义车辆、行人等交通参与者,指定速度变化、换道、跟车、停车、路径跟随、交通灯变化、环境条件变化等动态行为。ASAM 官方说明,OpenSCENARIO XML 主要用于描述涉及多车辆、行人和其他交通参与者的复杂同步机动行为,并支持基于驾驶员动作或轨迹的场景描述。
2. OpenSCENARIO 与 OpenDRIVE 的区别
理解 OpenSCENARIO,必须把它和 OpenDRIVE 分开。
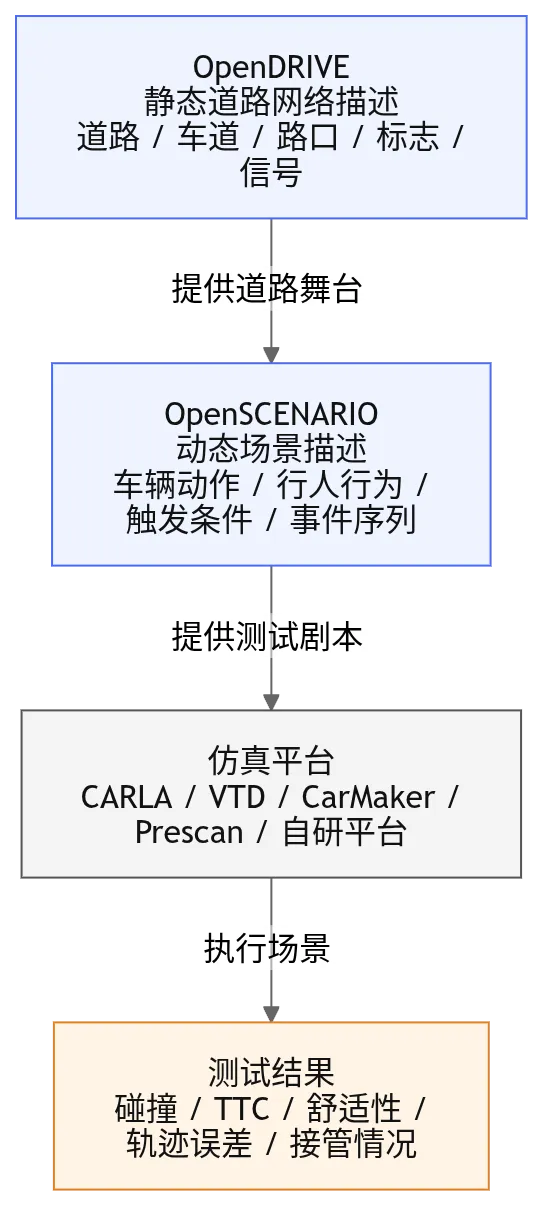
OpenDRIVE 描述“路是什么样”,包括道路几何、车道、路口、道路连接关系、交通标志、静态道路网络等。ASAM 官方把 OpenDRIVE 定义为静态道路网络描述标准,文件格式通常是 .xodr 或 .xodrz。
OpenSCENARIO 描述“路上发生了什么”,包括车辆如何运动、何时触发某个动作、交通参与者之间如何交互、测试何时开始和结束等。OpenSCENARIO XML 的文件格式通常是 .xosc,OpenSCENARIO DSL 的文件格式通常是 .osc。
所以可以这样理解:
如果一个自动驾驶仿真系统只有 OpenDRIVE,没有 OpenSCENARIO,那么它只有“地图”,没有“测试事件”;如果只有 OpenSCENARIO,没有 OpenDRIVE,它可以描述事件逻辑,但缺少具体道路承载环境。
3. OpenSCENARIO 的基本结构
以 OpenSCENARIO XML 为例,它通常采用分层结构组织场景。ASAM 官方文档提到,场景描述可组织为 storyboard,并进一步细分为 stories、acts 和 sequences;事件由条件触发,动作则描述具体发生什么,例如变道、超车、减速、驶向某个位置或改变交通灯状态。
可以粗略理解为:
Entities:谁参与场景
包括自车、目标车、行人、骑行者、障碍物等。
Road / Environment:在哪里发生
通常关联 OpenDRIVE 地图,也可以指定天气、光照、道路摩擦系数等环境条件。
Storyboard:剧情如何推进
描述测试开始后,不同参与者在什么条件下做什么动作。
Trigger:什么时候触发
比如距离前车小于 20 米、仿真时间达到 5 秒、自车速度超过 60 km/h、车辆到达某个位置等。
Action:触发后做什么
比如目标车变道、自车制动、行人横穿、交通灯变红、前车减速等。
Parameter:哪些变量可以变化
例如初始速度、跟车距离、切入时间、制动减速度等。参数化是 OpenSCENARIO 的关键价值之一,因为它允许一个基础场景生成大量测试变体,而不是手工写成百上千个文件。
4. OpenSCENARIO XML 与 OpenSCENARIO DSL
OpenSCENARIO 目前不是单一形态,而是并行存在两个标准:OpenSCENARIO XML 和 OpenSCENARIO DSL。ASAM 在 2024 年宣布将原 OpenSCENARIO 1.x 和 2.x 拆分为两个独立标准:1.x 对应 XML,2.x 对应 DSL,二者不要求正式迁移或强制融合。
截至目前,ASAM OpenSCENARIO XML 的当前版本是 1.3.1,发布日期为 2024 年 11 月 21 日;ASAM OpenSCENARIO DSL 的当前版本是 2.2.0,发布日期为 2026 年 3 月 19 日。
二者差异很重要:
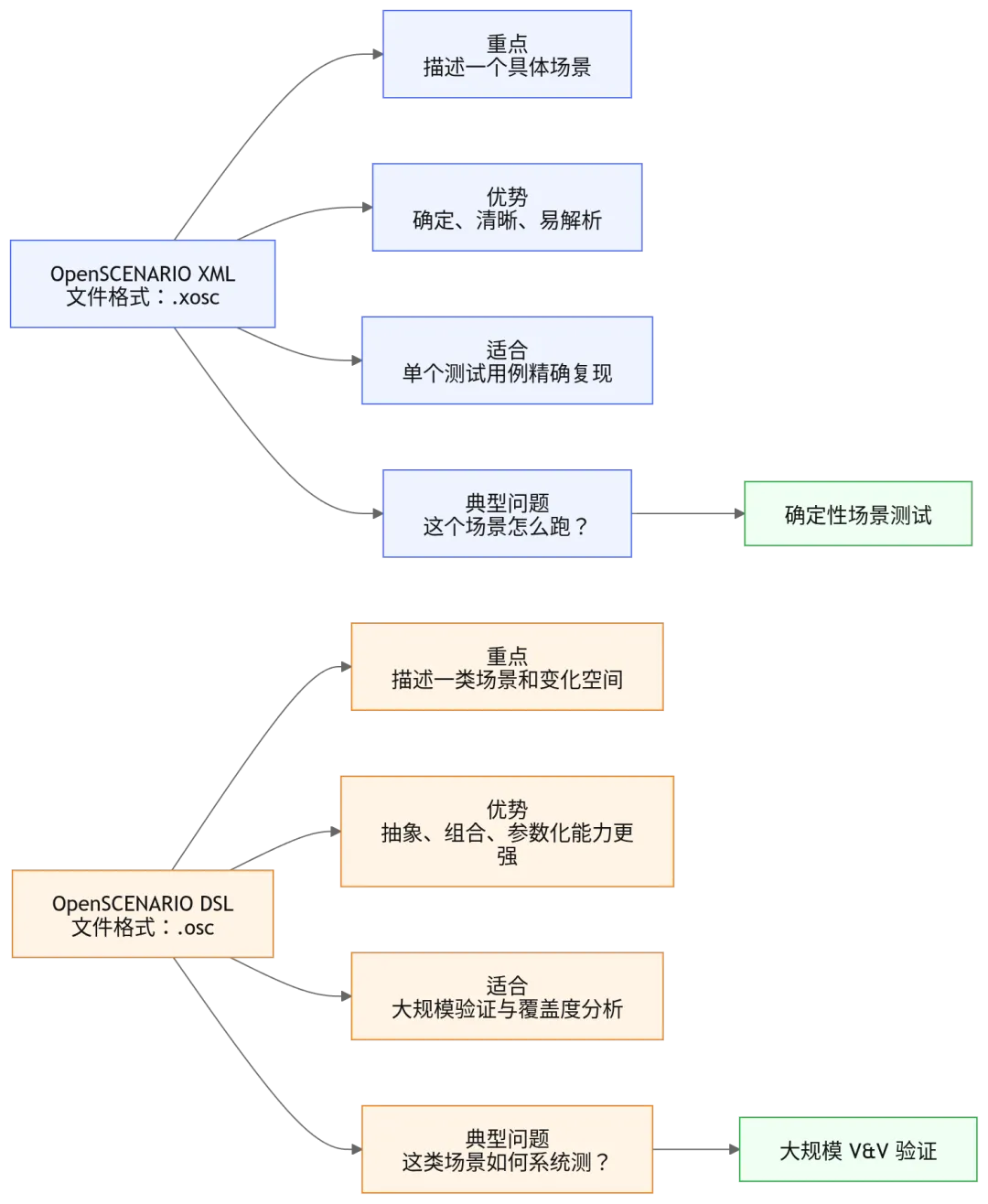
ASAM 官方也明确区分了二者:OpenSCENARIO XML 更适合描述可预测、高精度、可与外部测试规范配合使用的场景;OpenSCENARIO DSL 则面向自动驾驶和 ADAS 的大规模安全与功能验证,强调组合复用、抽象场景、KPI、检查项和覆盖度指标。
5. 为什么自动驾驶测试需要 OpenSCENARIO
自动驾驶测试的难点不是“跑几个 demo”,而是如何证明系统在大量复杂、危险、边缘场景中具有足够安全性。真实道路测试成本高、风险高、覆盖效率低,因此行业必须依赖虚拟仿真、场景库和自动化测试。
OpenSCENARIO 的价值主要体现在四点。
第一,提高场景复现能力。同一个 cut-in、AEB、ACC、行人横穿、无保护左转场景,可以被标准化描述,并在不同工具链中重复执行。
第二,降低供应商绑定风险。如果场景只存在某一家仿真软件的私有格式里,车企或测试机构就会被工具生态锁死。OpenSCENARIO 作为公开、厂商中立标准,有助于场景资产跨平台迁移。ASAM 官方也强调,OpenSCENARIO XML 是公开开发、供应商无关的标准,适合用于安全验证相关的场景库定义。
第三,支持参数化与批量测试。例如同一个并线场景,可以把切入距离设置为 10 m、15 m、20 m,把前车速度设置为 40 km/h、60 km/h、80 km/h,把天气设置为晴天、雨天、夜间。这样,一个基础场景就能扩展为大量测试用例。
第四,支撑法规、认证和评价体系建设。自动驾驶安全验证最终需要可解释、可审计、可复现的测试证据。标准化场景语言比口头描述、视频说明或私有脚本更适合进入认证和工程闭环。
6. 局限
OpenSCENARIO 很重要,但不要神化它。
第一,它不负责物理真实性。车辆动力学、传感器模型、雷达反射、摄像头成像、轮胎路面作用、控制器延迟,这些不是 OpenSCENARIO 本身解决的问题。
第二,它不保证不同仿真器结果完全一致。ASAM 官方也指出,虽然标准化格式能够清晰描述机动行为,但不同仿真器的仿真结果不一定相同。这是因为执行引擎、车辆模型、交通流模型、控制器接口、碰撞判定和时间步长都可能不同。
第三,它更偏测试描述,不等于场景生成智能。OpenSCENARIO 可以描述场景,但如何从真实事故、自然驾驶数据、corner case 挖掘、生成式模型中自动构建高价值场景,是另一套问题。
第四,XML 版本的表达能力相对偏“具体执行”,复杂场景写起来会臃肿;DSL 版本更适合抽象和组合,但工具链成熟度、解析器支持、工程落地仍需要看具体平台能力。近期也有研究关注如何把 OpenSCENARIO 2.1 DSL 编译到 CARLA 等开源仿真平台中,这侧面说明 DSL 的表达能力更强,但工程生态仍在建设过程中。
结论
OpenSCENARIO 的本质是自动驾驶仿真测试中的动态场景描述标准。它负责把“谁在什么道路环境下、什么时候、因为什么条件、做了什么动作、测试如何评价”写成可执行、可交换、可复现的标准化场景。它的价值不在于让画面更真实,而在于让测试场景资产标准化、参数化和工程化。
对普通仿真项目来说,OpenSCENARIO XML 已经足够承担大量确定性场景测试;对面向自动驾驶安全验证、场景库建设和大规模 V&V 的高级项目,则需要关注 OpenSCENARIO DSL。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
