自动驾驶百年征程:从沙漠挑战赛到城市Robotaxi
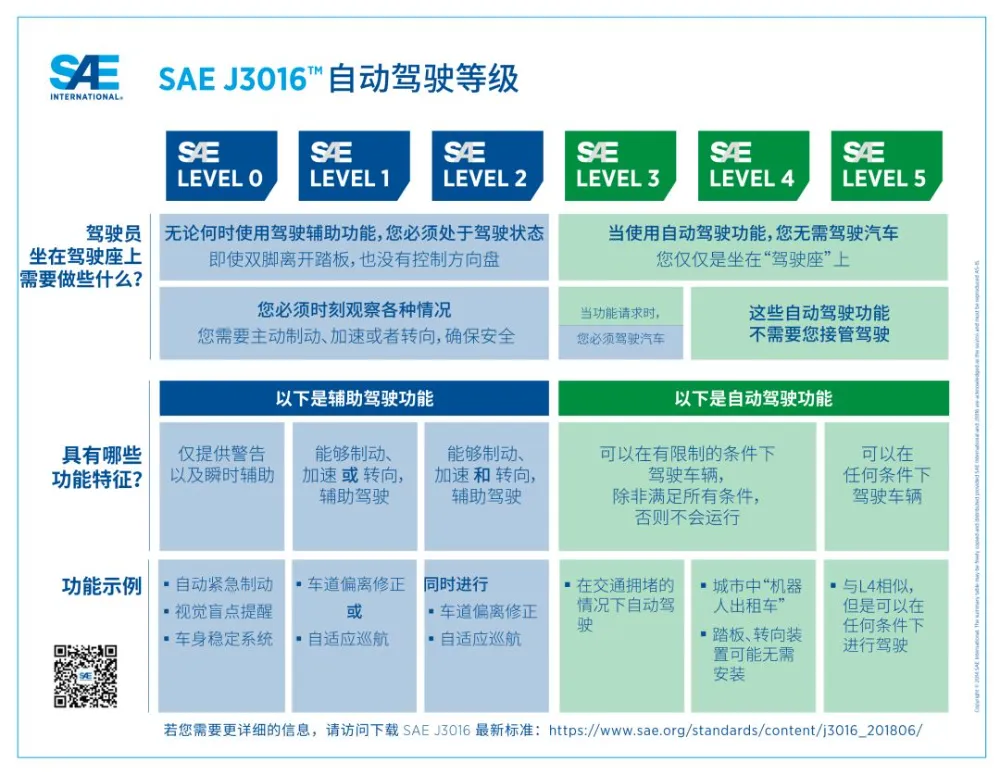
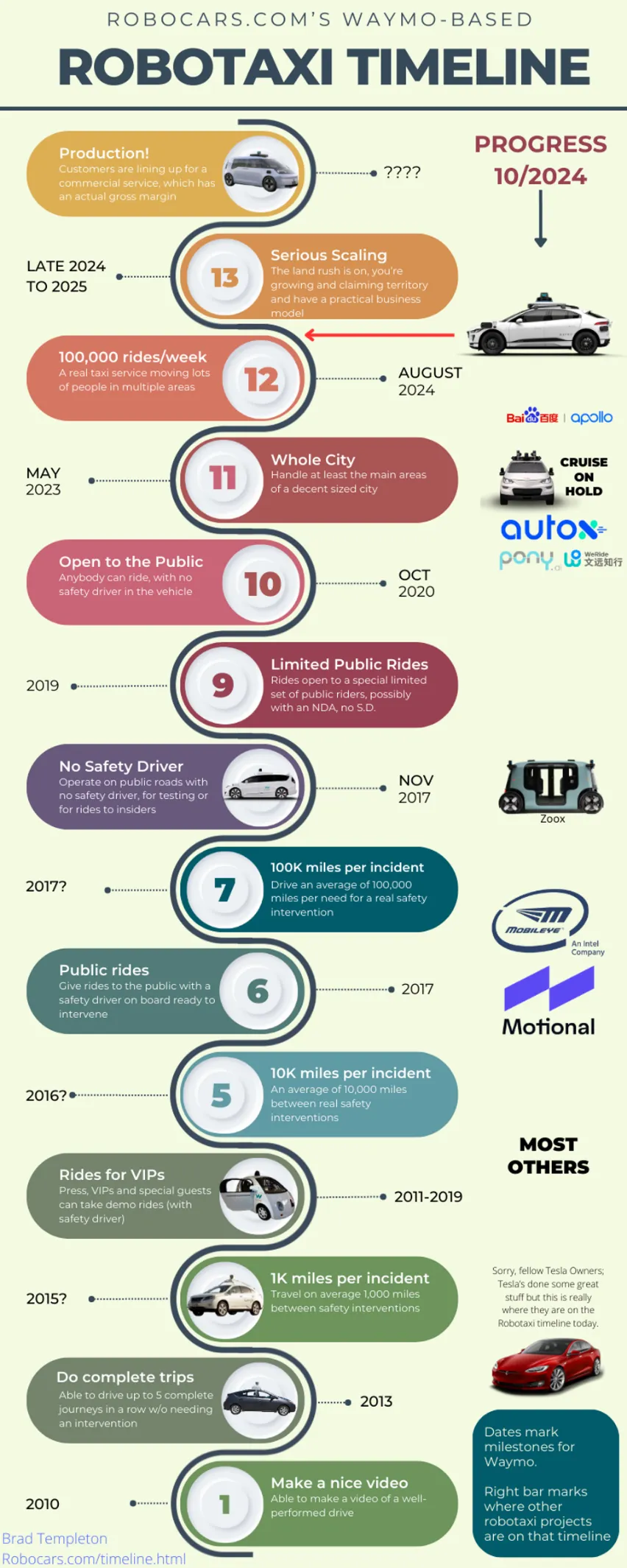
L. Chen, P. Wu, K. Chitta, et al., "End-to-end autonomous driving: Challenges and frontiers," IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 46, no. 12, pp. 10164-10183, 2024. C. Urmson et al., "Autonomous driving in urban environments: Boss and the Urban Challenge," Journal of Field Robotics, vol. 25, no. 8, pp. 425-466, 2008. SAE International, "SAE J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems," 2021.近年来,自动驾驶技术已从实验室走向城市街头,成为人工智能领域最具变革性的应用之一。从2004年DARPA大挑战赛无一完赛的尴尬,到2025年Waymo每周完成45万单全无人驾驶订单,自动驾驶用二十年时间完成了从“科幻概念”到“商业现实”的跨越。目前,基于端到端神经网络的技术路线正引领第三次技术革命。特斯拉FSD V12采用端到端架构,Waymo在旧金山、洛杉矶等城市实现规模化Robotaxi运营,中国车企则在L2+辅助驾驶领域快速普及。然而,完全自动驾驶(L5)仍面临长尾场景、法规伦理、传感器成本等关键挑战。在城市末端配送场景中,自动驾驶物流车主要面临以下三大核心挑战:1925年,Houdina无线电控制公司展示了首辆无线电遥控汽车“美国奇迹”,标志着人类对无人驾驶的初步想象。1992年,中国国防科技大学研制出首辆红旗无人车;1998年,意大利VisLab的ARGO项目在高速公路上实现2000公里94%自动驾驶里程。2004年3月13日,首届DARPA大挑战赛在美国莫哈韦沙漠举行,15支队伍竟无一完赛——卡内基梅隆大学的"红队"仅行驶7.4英里(约11.9公里)。2005年,斯坦福大学塞巴斯蒂安·特龙(Sebastian Thrun)带领的“Stanley”赛车以6小时53分钟完成212公里越野赛道,赢得200万美元奖金。2007年11月3日,DARPA城市挑战赛在加州维克多维尔举行。卡内基梅隆大学与通用汽车合作的“Boss”(雪佛兰Tahoe)在6小时内完成96公里城市路况,成功应对交通信号灯、十字路口让行、并线等复杂场景,夺得冠军。这一赛事确立了现代自动驾驶"感知-决策-控制"的基本技术架构。2009年1月,谷歌秘密启动“Chauffeur项目”(Project Chauffeur),特龙邀请DARPA挑战赛核心人才加盟。2010年,该项目已在公共道路上完成10条100英里路线的全自动驾驶。2012年,谷歌获得内华达州首张自动驾驶牌照。2016年12月,项目正式独立为Waymo。2014年1月,SAE International发布J3016标准,首次定义L0-L5六级驾驶自动化分类框架,为全球技术路线提供统一语言。2015年10月,特斯拉推出Autopilot辅助系统,开创消费级自动驾驶先河。2016年,发布Hardware 2.0;2019年,自研Hardware 3.0芯片。2023年,特斯拉FSD V12转向端到端神经网络架构,摒弃人工编码规则。2024年10月,发布Robotaxi产品Cybercab。2025年6月,奥斯汀Robotaxi服务正式上线。Waymo商业化加速:2023年5月每周订单约1万单,2024年8月达10万单,2025年底突破45万单/周,预计2026年底将达100万单/周。近年来,自动驾驶技术已从实验室走向城市街头,成为人工智能领域最具变革性的应用之一。从2004年DARPA大挑战赛无一完赛的尴尬,到2025年Waymo每周完成45万单全无人驾驶订单,自动驾驶用二十年时间完成了从“科幻概念”到“商业现实”的跨越。目前,基于端到端神经网络的技术路线正引领第三次技术革命。特斯拉FSD V12采用端到端架构,Waymo在旧金山、洛杉矶等城市实现规模化Robotaxi运营,中国车企则在L2+辅助驾驶领域快速普及。然而,完全自动驾驶(L5)仍面临长尾场景、法规伦理、传感器成本等关键挑战。从L2辅助驾驶逐步迭代,通过影子模式收集海量真实道路数据,利用端到端神经网络实现能力跃升。优势在于数据规模与商业化速度,挑战在于安全边界与长尾场景处理。直接研发L4级无人驾驶,依赖激光雷达+高精地图+规则引擎,在限定区域实现全无人运营。优势在于安全性与可靠性,挑战在于成本高企与区域泛化。当前,自动驾驶正处于从“技术验证”向“规模商业”跨越的关键节点。SAE J3016标准在2021年更新后,进一步明确了L3级“有条件自动化”的人机责任边界。中国《汽车驾驶自动化分级》(GB/T 40429-2021)也于2021年采纳类似框架。正如IEEE T-IV综述所指出的,端到端自动驾驶正成为主流范式,但多模态融合、可解释性、因果混淆与世界模型仍是待解难题。从沙漠到城市,从实验室到街头,自动驾驶的百年征程仍在继续。End-to-end Autonomous Driving: Challenges and Frontiers (IEEE T-PAMI, 2024)Milestones in Autonomous Driving and Intelligent Vehicles: Survey of Surveys (IEEE T-IV, 2023)A Reasoning Framework for Autonomous Urban Driving (CMU, 2008)申请加入团队,请发送简历到邮箱:CIUDTlab@163.com

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
