在AI行业,有一个不成文的共识:
模型的上限取决于算法,但下限绝对取决于数据。
当我们狂热地追逐算力芯片,惊叹于大模型的参数量时,有一个最枯燥、最繁重,却也最关键的环节,往往被忽视。
它就是——3D点云数据标注。
如果说2D图像标注是教机器“看照片”,那么3D点云标注,就是给机器装上一双能在三维世界中精确丈量的眼睛。
01 为什么是“点云”?
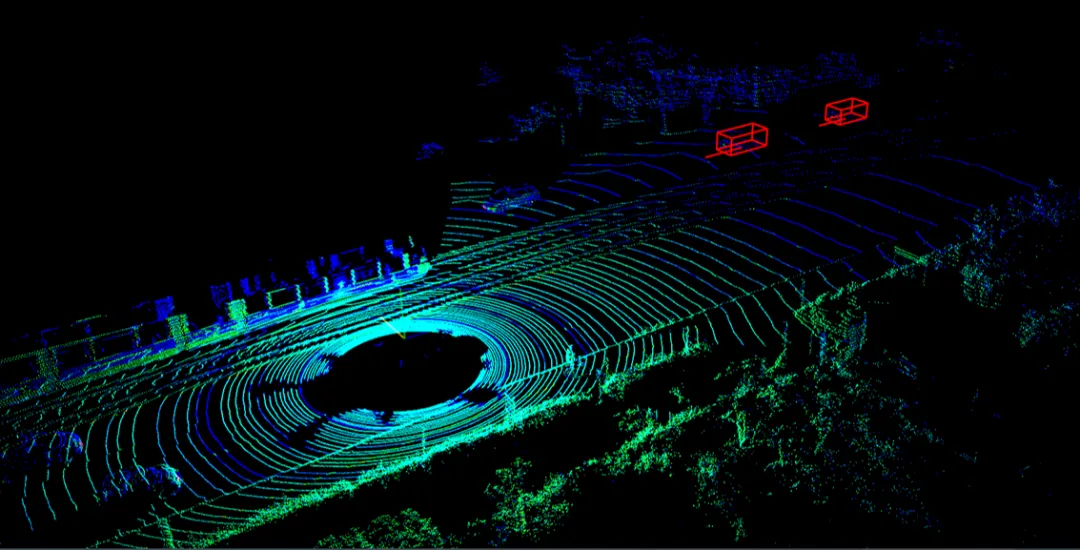
在自动驾驶的感知系统中,激光雷达(LiDAR)是绝对的核心。
它通过发射激光束并接收反射信号,生成包含数百万个空间坐标点(X, Y, Z)的集合。这就是“点云”。
与2D图像不同,点云天然具备空间几何特性,不受光照影响,能提供极度精确的深度信息。
然而,精确的代价是“无法理解”。
在算法眼中,初始的点云只是一堆漂浮在空间中的、没有标签的数学坐标。
哪些点属于车辆?哪些点属于行人?哪些只是路边的噪点?
让机器搞懂这些,全靠3D点云数据标注。
02 技术的“针尖”:四大核心难点
相比于2D拉框,3D点云标注是典型的高门槛、高技术工种。它的难点,主要集中在这四个方面:
① 空间遮挡与截断
激光雷达的“视线”是直线的。如果一个行人站在大货车旁边,反射回来的点可能只有寥寥几个。
标注员需要在极度稀疏的点云片段中,凭经验框出完整的3D边界框。这无异于盲人摸象,极度考验空间想象力。
② 远距离小目标
在80米开外的行人或锥桶,在点云中仅由3~5个点构成。
要在大量噪点中精准揪出这些“微弱信号”,并正确归类(是行人还是自行车?),是标注算法和人工质检面临的最大难题。
③ 多帧时序标注(4D Labeling)
单帧是静态的,但真实路况是连续的。
为了训练模型感知速度与方向,业界引入了“4D标注”(3D空间+时间维度)。要求在同一物体的连续几十帧中,保持ID、形状、朝向完全一致。这不仅让工作量翻倍,更考验逻辑推理能力。
④ 语义分割的颗粒度
不仅要框出车辆,还要区分出哪些点是车窗,哪些点是车轮,哪些是路面标识。这种精细度,直接决定了车辆对“可行驶区域”的判断。
03 标注工艺的“金字塔”
当前的3D点云标注,已进化出完善的工序层级。主流形态主要有三种:
3D包围盒标注:为基础形态。为动态物体绘制紧贴外接轮廓的立方体。核心指标:朝向角偏差必须控制在±2度以内。
语义与实例分割:将点云中的每一个点赋予特定标签(地面、植被、车面等)。要求对物理材质边界有精准认知。
融合标注:目前单价最高的形态。将图像与点云联合标注。用图像纹理辅助确认类别,再反向用点云修正距离感。
04 痛点:效率、质量与隐私的三角博弈
尽管自动化预标注模型已能解决80%的简单场景,但剩下的20%“长尾场景”——如事故残骸、散落货物、异常施工——依然依赖大量人力。
目前的行业困境,非常现实:
培养成本极高:一个成熟的3D标注员,需经过至少3个月培训,熟练掌握俯视、侧视、前视图的切换与空间旋转操作。
衡量标准复杂:质检不仅是“画得对不对”,更要看“中心点是否在几何中心”、“朝向是否符合物理逻辑”。
数据安全红线:点云涉及高精地图坐标,属国家严格监管的敏感信息。标注必须在物理隔离的服务器上进行,严禁外泄。
05 未来:走向“数据闭环”
随着技术演进,“Human-in-the-loop(人机回环)”成为主流。
未来的3D标注不再是纯体力活,而是演变为“数据工程”:
算法挖掘高价值场景并预标注 → 人工仅负责质检与难例修正 → 修正后的数据反哺算法迭代。
结语
当我们惊叹于一辆汽车能在暴雨夜平稳穿越复杂路口时,别忘了,那隐藏在激光脉冲背后的,是无数标注工程师在三维坐标系中一笔一划勾勒出的“数字物理法则”。
3D点云数据标注,
是让AI读懂这个立体世界的第一步,
也是最重要的一步。
如果你觉得这篇文章对你有帮助,欢迎点赞、在看、转发给身边做自动驾驶或AI算法的朋友。
关于点云标注,如果你有更深的行业洞察或想了解具体的报价单成本构成,也欢迎在评论区留言讨论。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
