兄弟们,最近自动驾驶圈又干起来了。工信部出了个国标征求意见稿,结果网上有自媒体直接开喷:L4必须装激光雷达,纯视觉要被封杀了!小鹏高管于涛气得当场爆粗:全文大字没提激光雷达,你们眼瞎啊?
我连夜翻完几十页文件,确实,激光雷达四个字都没出现。但看完具体条款,我替纯视觉车主倒吸一口凉气——国标没规定你用什么笔考试,但划的及格线,纯视觉想跨过去,难度堪比让近视眼不戴眼镜就考驾照。
第一个坑:雨雪天你得“自己知道看不清”
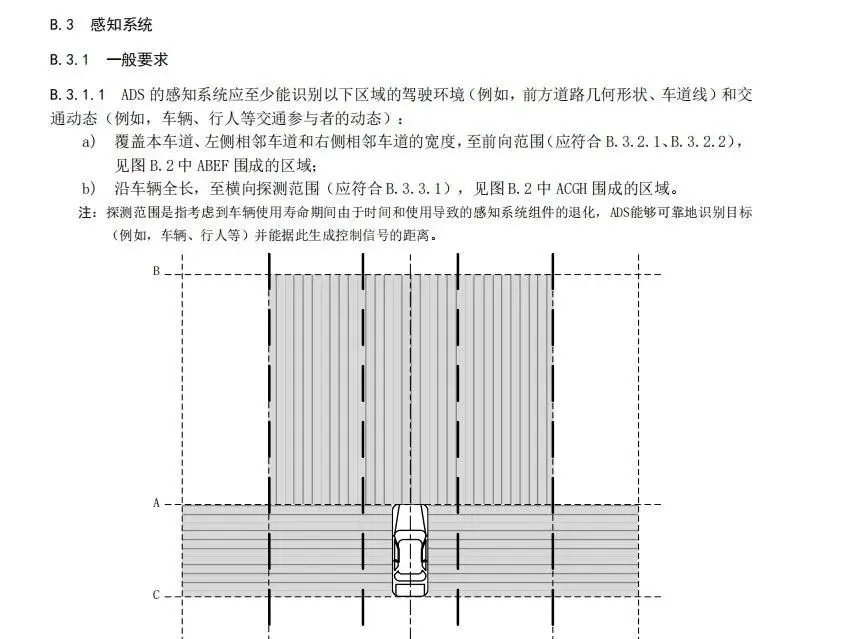
标准明确:系统必须检测并补偿因环境造成的感知能力下降。大白话讲,就是你的摄像头在大雾、暴雨、逆光里性能打折了,车自己得知道,并且主动降速或者想办法补救。
这对纯视觉意味着什么?就像你开车时眼睛突然被泼了盆水,系统得立刻意识到“我瞎了”,然后自动把油门松了。特斯拉的纯视觉方案遇到大雾,算法再牛也架不住物理天花板——摄像头就是拍不清,强行开120迈,这不是赌博么?
第二个坑:坏一个传感器也不能出事
标准说:即使有单一感知故障没导致失效,系统也不能引起危害。翻译一下——你在高速上,前视摄像头被鸟屎糊了,或者被夕阳致盲了,车不能出事故。
纯视觉的车,摄像头就是命根子。坏一个就像人少了一只眼,还得能安全变道、刹车、靠边。除非你有冗余方案,不然靠单目摄像头深度估计,遇上侧翻货车,算法直接懵逼。激光雷达呢?坏了一个毫米波雷达,还剩两颗激光雷达撑着,容错率根本不是一回事。
第三个坑:成本优势快被激光雷达干没了
以前说纯视觉省钱,一颗激光雷达上万块,20万的车装不起。现在呢?最便宜的激光雷达跌到千元级别,10万块的走量车都开始标配了。纯视觉省的那点硬件钱,还不够买一次保险的溢价。
更扎心的是,激光雷达提供的是3D点云,直接告诉你前方2米有个水泥墩,而纯视觉得靠算力去猜。现在算法迭代快,但物理定律不是靠代码能糊弄的。极端场景下,激光雷达就是“保命符”,纯视觉就是“赌运气”。
国标没封杀谁,但物理定律封杀了幻想
说到底,这场争论不是政策站队,而是安全成本博弈。激光雷达越来越便宜,纯视觉要跨越的技术鸿沟却依然横在那。小鹏说“结果导向”,没问题,但纯视觉想通过安全验证,得花多少研发成本去补摄像头天然缺陷?这笔账,车企比我们算得清。
我劝纯视觉车主别慌,但也别盲目乐观。等哪天大雨天你开着纯视觉车,前面突然掉下一块落石,你希望靠摄像头还是靠激光雷达?答案在你心里。
最后送大家一句:国标没提激光雷达,但物理课代表告诉你——想及格,不如先戴个“眼镜”。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
