2026年1月8日,自动驾驶行业两件大事颇具风向标意义:萝卜快跑启用迪拜工厂,这是暨拿下迪拜全无人驾驶测试许可之后的又一大新闻,福特则公布了2028年L3量产路线图。在我看来,这两则新闻恰恰勾勒出当下自动驾驶产业的两条核心赛道,萝卜快跑的全栈闭环跨越式路线,以及福特的开放集成渐进式路线。这两条路线的演进节奏,直接决定了我们普通消费者什么时候能用上更安全、更实惠的自动驾驶功能。有意思的是,渐进式路线在加速L2+辅助驾驶普及,跨越式路线则在推动Robotaxi商业化落地,这种双重竞争反而倒逼整个行业技术升级、成本下降,有测算显示,2028年L3级自动驾驶的渗透率有望达到55%。
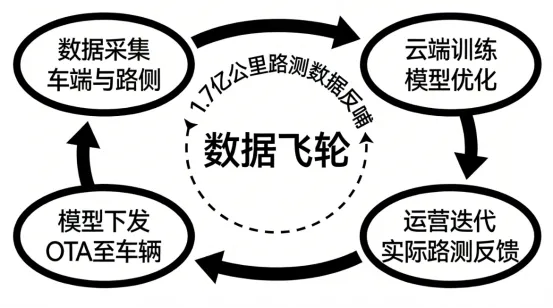
先看萝卜快跑的路径,它走的是全栈技术闭环的路子,这点我认为是其核心竞争力所在。它构建的“车-路-云-图”四维体系,简单说就是通过云端、路侧设施与车辆、地图的协同来提升可靠性:云端大模型提供算力支撑,边缘层负责车队实时管理,车端搭载多传感器融合系统还专门适配了中东环境,底层再整合基础设施形成一体化支撑。其核心方案靠的是多传感器前融合、云端大模型闭环训练和车路云协同控制,通过“采集-训练-下发-迭代”的数据飞轮不断提升技术可靠性。商业化推进上,它采用“测试-运营-迭代”的模式,优势很明确:技术协同效率高、有区域数据壁垒、成本控制到位,而且迭代速度快。目前它已经在全球15个城市部署了超千辆无人车,累计安全行驶1.7亿公里,这些实际运营数据又反过来给技术迭代提供了支撑。
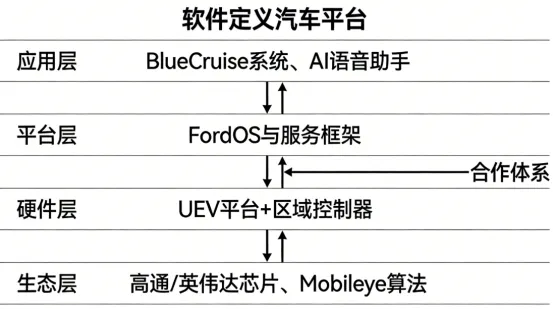
再看福特,它选择的开放集成路线,在我看来是传统车企应对自动驾驶变革的稳健之选。福特把重点放在电子架构重构和开放集成上,打造了“应用-平台-硬件-生态”四层解耦架构。核心方案围绕新一代电子电气架构、智能计算模块和分层软件架构展开,通过和高通、Mobileye这些伙伴合作,有效降低了研发成本和风险。它的开发遵循五阶段流程,目前已有超49万辆车型搭载了BlueCruise系统,北美用户用这套系统在高速上辅助行驶的里程都超3.9亿公里了。这种“功能迭代-市场渗透-生态扩张”的路径,优势在于成本控制成熟、供应链安全有保障、技术过渡平滑,再加上福特多年的整车集成经验和全球合规能力,容错率更高。
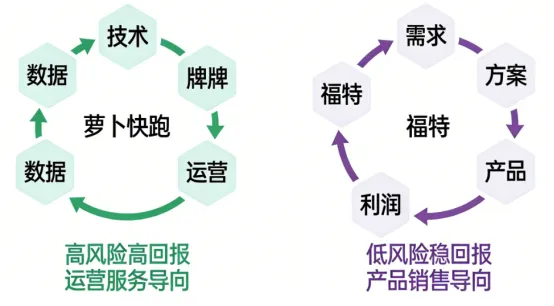
其实这两种模式,在我看来都是企业基于自身基因的理性选择。全栈闭环模式靠垂直整合筑壁垒,迭代快、偏向运营服务,属于高风险高回报;开放集成模式聚焦核心自研、合作补位,迭代稳健、偏向产品销售,是低风险稳回报的路子。业务逻辑上也能看出差异:萝卜快跑形成了“技术-牌照-运营-数据”的循环,福特则构建了“需求-方案-产品-利润”的闭环。
至于行业争议,我觉得集中在两个点:全栈闭环会不会造成数据孤岛?开放集成能不能保证技术领先性?这两种路线在数据安全、技术成熟度、商业模式可持续性上各有优劣。而且政策影响也不可忽视,中国、阿联酋这些国家积极推动全无人驾驶测试,更利于萝卜快跑这类路线;欧美市场注重功能安全认证和渐进式部署,对福特来说更友好。在我看来,产业演进会分三个阶段:短期(2026年)两条路线会在不同市场各自突破;中期(2030年)大概率会交汇融合,形成协作范式;长期则会明确专业分工,推动自动驾驶全面普及。
对我们消费者和投资者来说,这两条路线的价值也不一样。消费者层面,萝卜快跑的路线可能让我们更早用上Robotaxi,但初期成本会高一些;福特的路线则能让L2+辅助驾驶更快走进普通量产车,价格更亲民。投资层面,全栈闭环模式适合追求高成长性的风险资本,开放集成模式则更对传统车企和稳健投资者的胃口。
说到底,“全栈闭环筑壁垒,开放集成降风险”这两种技术哲学,都是在推动自动驾驶产业向前发展。在我看来,不管最后哪种路线胜出,最终受益的都是我们这些追求更安全、更便捷出行的消费者。