一文读懂 SLAM:自动驾驶精准定位的核心,竟藏着这些奥秘!
在讨论自动驾驶技术时,SLAM 是一个常被提及的核心概念。其全称为“同时定位与建图”,指的是移动设备能够在未知环境中,实时构建周围地图并同步确定自身位置的过程。这类似于一个人一边探索陌生区域,一边绘制地图并随时标注自己所处的方位。
SLAM技术的核心是配备相应的传感器,能够在缺乏环境数据的情况下,依靠传感器的运动监测实时传感数据。在监测数据中,其一是对传感器在环境中的位置与姿态进行推算;其二是对周围环境的结构与特征进行相关的建模。这项技术有效克服了传统定位方法的缺陷与不足。例如GPS在室内或复杂城市环境中容易受到干扰、定位精度下降等相关问题,从而拓展了自主系统的应用边界。
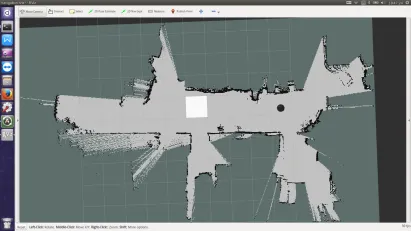
在自动驾驶领域,SLAM是实现高阶自主驾驶的基石。当一辆自动泊车功能的车辆进入一个全新的地下车库时,既无卫星信号,也没有高精地图的辅助。此时,SLAM系统能够利用车辆自身的传感器,感知周围环境的变化,并在此基础上,动态生成车库的内部地图,一边实时计算出车辆在该地图中的精确坐标与航向,从而实现车辆的定位和环境的感知。
除此之外,SLAM技术与高精地图加持具有双重保障。在车辆自动行进时,当预设高精度地图与实际路况出现不一致时,SLAM也能提供在线修正功能,减少因完全依赖离线地图可能引发的安全风险。
实际上,在不同的驾驶场景,SLAM技术的要求也存在显著的差异。例如,在低速的城市道路或封闭园区内,基于视觉或激光的SLAM方案能够生成高精度的局部地图,有效帮助车辆识别车道线、静态障碍物等结构;而在高速行驶场景下,SLAM技术则常与惯性导航系统结合,发挥短时且高频的位置补偿,以此增强整个定位系统的连续性和抗干扰能力。
当前主流的SLAM技术,主要依据其核心传感器和算法原理,可归纳为四类:视觉SLAM、激光雷达SLAM、组合导航SLAM和多传感器融合SLAM。前三类围绕单一传感器展开,算法在于克服该传感器的固有短板;而多传感器融合SLAM则采取“取长补短”的策略,通过综合处理不同来源的感知信息,以达成更为稳定和精确的定位建图效果。
这几种实现路径在技术特性上各有侧重:
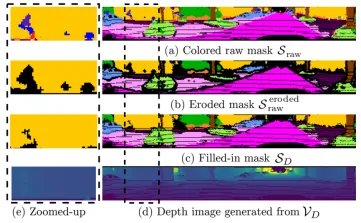
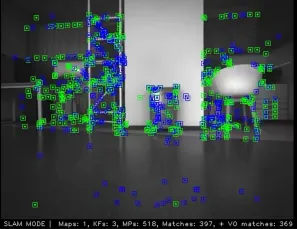
视觉SLAM是基于摄像头图像,具备成本优势,但对光照变化和视野遮挡较为敏感;
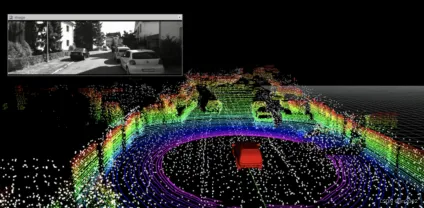
激光雷达SLAM以三维点云为基础,精度与抗干扰能力出色,但设备价格相对昂贵;
组合导航SLAM借助运动姿态实现快速位姿推算,实时性好但存在误差累积问题;
多传感器融合SLAM则是通过信息融合算法协调多种数据输入,在精度、成本与系统稳定性之间寻求最优解,从而更好地应对自动驾驶所面临的复杂真实环境。
SLAM是自动驾驶汽车感知环境、精准定位的核心支撑,但在真实应用中面临多重关键挑战。其中动态环境干扰是最普遍的难题,城市道路中的行人、车辆等动态目标会导致系统异常,引发定位漂移和地图污染,且动态目标存在不确定性,进一步增加了过滤的难度。
雨雪、大雾等恶劣天气会严重干扰激光雷达点云信号与摄像头图像质量,导致有效特征提取困难;隧道、城市峡谷等场景纹理单一、信号屏蔽或高楼反射干扰,易引发定位迷失,直接影响行驶安全。高阶自动驾驶需厘米级定位精度,但提升精度意味着复杂的算法计算,从而导致计算时间的延长,而车载嵌入式平台的算力限制更加剧了这一矛盾,难以兼顾性能需求。
此外,高精地图的更新滞后性也是SLAM面临的挑战。道路施工、交通标志变更等因素无法及时同步至地图,导致路径规划失误;且传感器精度易受车辆振动、温度变化影响,让SLAM的应用困难重重。这些难题共同构成了SLAM技术向高阶自动驾驶规模化落地的重要障碍。
基于SLAM的应用,艾恩科技已研发出完善的智能网联设备,产品搭载多种传感器,例如智能网联教学及开发平台、多传感器融合实验平台、车路云一体化实验平台等设备,为高校教学及企业培训提供参考。








 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
