一辆自动驾驶汽车正平稳驶向十字路口,前方一辆高大的厢式货车完全挡住了信号灯。人类司机会探头张望或犹豫减速,而这辆车的系统却已果断平稳停下——它究竟是怎么“看见”并相信那个看不见的红灯的?
自动驾驶汽车识别红绿灯的解决方案其实借鉴了人类经验。早期方法基于计算机视觉,系统会在图像中寻找特定颜色和圆形轮廓。
它先扫描画面,圈出所有可能是红绿灯的区域,再检查这些区域是否红、黄或绿。这种方法在天气晴朗、视线良好的情况下有效,但当黄昏阳光把红灯染成橙色,或是雨天玻璃反光时,就容易出错。
01 视觉感知,自动驾驶的“眼睛”如何工作
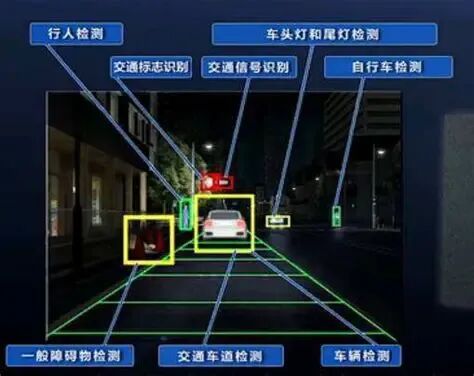
摄像头是自动驾驶识别红绿灯的主要工具。车载摄像头持续捕获周围环境的二维图像,形成视频流。系统要做的就是在这些不断变化的画面中,快速定位交通信号灯并解读其状态。
传统算法基于颜色阈值分割与边缘检测。系统会先转换图像色彩空间,突出红、黄、绿等颜色区域,再结合圆形检测算法找出类似灯组的候选区。
这种方法简单直接,但受环境影响大。雾霾、强光、阴影都可能干扰颜色判断,远处的小灯组也容易漏检。因此,仅靠传统算法的早期自动驾驶系统,在城市复杂路口的可靠性并不理想。
02 深度学习,让识别更聪明
近年,基于深度学习的识别方法已成为主流。它不依赖手工设定的颜色规则,而是让神经网络从海量标注数据中自主学习。
研究人员收集了数百万张包含红绿灯的街景图片,涵盖白天黑夜、晴雨雾雪、不同角度和距离,并为每张图中的红绿灯位置和状态(红、黄、绿、熄灭、箭头方向等)进行精确标注。
通过这些数据训练出的卷积神经网络模型,能自动学习红绿灯的本质特征。比如,模型不仅知道红色是什么样子,更学会了“在逆光下,一个发亮的圆形轮廓结合特定位置,很可能就是红灯”。
目前先进的模型如YOLO、SSD、Faster R-CNN等都已被广泛应用于交通信号灯检测。这些模型在单帧图像识别准确率上远超传统方法。
03 多传感器协同作战
只靠摄像头还不够可靠。自动驾驶汽车采用多传感器融合策略来提高识别鲁棒性。高精度地图发挥了关键作用。
在车辆驶向路口前,高精度地图已提前告知系统:“前方150米处路口,左上方杆件上有三组信号灯,分别控制直行、左转和右转。”
感知系统因此大幅缩小了搜索范围。摄像头不再需要扫描整个画面,而是专注于地图指示的特定区域。这提升了速度,也降低了将远处广告牌灯光误判为信号灯的概率。
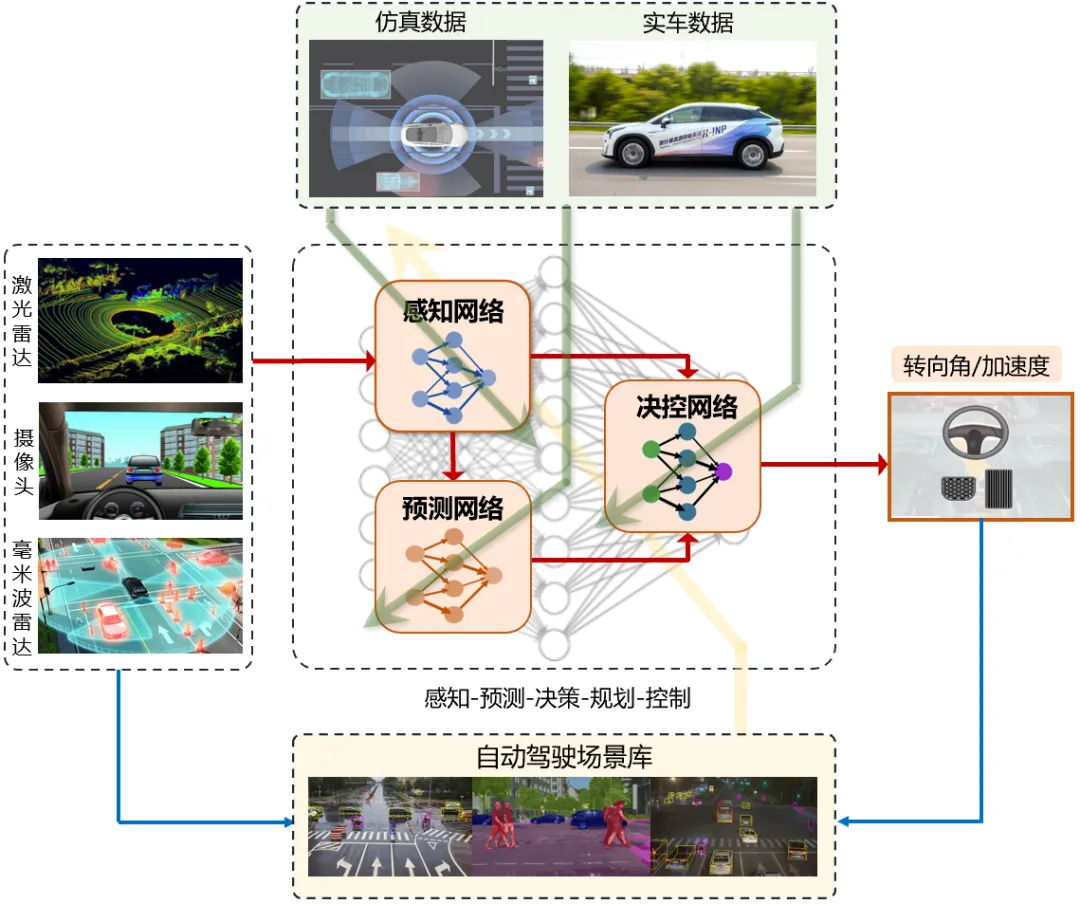
激光雷达则提供了另一种维度的信息。它通过发射激光束并测量反射时间来构建精确的三维点云图。虽然无法分辨颜色,但能准确测量物体的形状、大小和距离。
激光雷达可以确认“在预期位置确实存在一个尺寸与信号灯匹配的立体物体”,并与摄像头视觉识别结果相互校验。当摄像头因强光暂时“致盲”时,系统仍可依据激光雷达与高精度地图的融合数据,采取谨慎的保守策略。

04 从“看到”到“做到”,决策层的关键一跃
准确识别只是第一步,更重要的是正确决策。这要求系统不仅能识别灯的颜色,更要理解其语义。自动驾驶的决策模块需综合感知信息、车辆状态、交规与地图进行判断。
在有单独转向箭头的路口,系统必须明确区分直行圆灯与转向箭头灯的状态。决策算法会构建一个包含多种因素的状态机:当前车速、距离停车线的距离、目标行驶方向、对应信号灯状态、以及周边车辆和行人的预测行为。
系统的决策逻辑往往是保守的。在信号灯识别置信度不高(如严重遮挡、光线极差)、或不同传感器信息存在矛盾时,系统会优先选择 safest 行为——通常是减速停车,直到获得明确、可信的信息。
05 预测与协同,未来交通的智慧前瞻
最前沿的技术不止于识别当前状态,更在于预测未来变化。部分自动驾驶系统开始接入车路协同通信技术。
通过V2X通信,车辆可以直接从交通信号控制器获取精确的相位和时序信息,如“当前绿灯剩余8秒”。这让车辆的通过策略更加平稳高效,避免不必要的急加速或急刹。
结合高精度地图与历史大数据,更高级的系统还能对信号灯模式进行学习预测。在未联网的路口,通过长期观察,系统可能学习到该路口早晚高峰的配时规律,从而优化速度规划。
这种预测能力对先进制造业提出了高要求。它要求车载计算单元拥有强大的实时数据处理与机器学习推理能力,同时要求相关芯片、传感器在汽车的震动、温差等复杂工况下保持极高可靠性。
这正是智能制造与汽车工业深度融合的体现:从芯片设计、传感器制造到算法优化,每个环节都需达到车规级的极致标准。

当自动驾驶汽车接近一个被部分遮挡的信号灯,它调用的不仅仅是当前摄像头的一帧画面。它融合了高精地图的先验位置、激光雷达对遮挡物的轮廓判断、过去几帧中灯色的连续状态,甚至云端对该路口配时规律的预测。
一系列复杂计算在瞬间完成,最终转化为一条平顺的制动或通行指令。红绿灯识别这个基础任务,精准反映了自动驾驶技术的成熟度——它考验的是在真实世界不确定性中,实现可靠感知、稳健决策与安全执行的系统工程能力。
目前技术仍在不断进化,以应对更极端场景: LED灯光频闪造成的摄像头采集变形、极端雨雪天气下的传感器性能衰减、罕见或临时设置的交通信号样式……每一个细节都可能成为技术攻坚的课题。你认为,要实现全无人驾驶,红绿灯识别技术的可靠性必须跨越的下一个关键门槛是什么?欢迎在评论区分享你的见解。
公告:各位小主,由于网站www.amtbbs.org访问量越来越大,服务器负荷严重过载需要维护!我们需要引进外部资本扩大我们的运营规模;同时由于众所周知的原因我们需要逐步过渡到新域名:www.amtbbs.com;衷心感谢大家一直以来的厚爱和支持!------小艾
内容来源:网络
本期编辑:小艾
论文投稿:作为领先的高科技先进制造技术产业服务平台,AMT接受学术论文投稿;稿件的发布完全是公益和免费的;论文投稿邮箱:info@amtbbs.org
版权声明:AMT尊重版权并感谢每一位作者的辛苦付出与创作;除无法溯源的作品,我们均在文末备注了来源;如文章、视频、图片、文字涉及版权,请原创作者第一时间联系我们,我们将根据您提供的证明材料确认版权后立即删除内容或按国家规定标准支付稿酬!




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
