最近几年,自动驾驶圈子里的“传感器路线之争”几乎成了信仰之战。一派是以特斯拉为核心的“全栈视觉”路线,另一派则是国内主流的“多传感器融合”。
看着满大街头顶“犄角”(激光雷达)的新车,很多人问我:既然雷达能提供额外的信息,多装几个难道不是多一重保险吗?
我想借这篇文章把这个逻辑彻底讲透。我并不排斥雷达,但我整体不看好那种“以雷达为核心、以堆硬件换安全”的长期路径。在我看来,视觉路线的上限,才是自动驾驶真正的终局。
理解世界,远比“测量距离”更重要
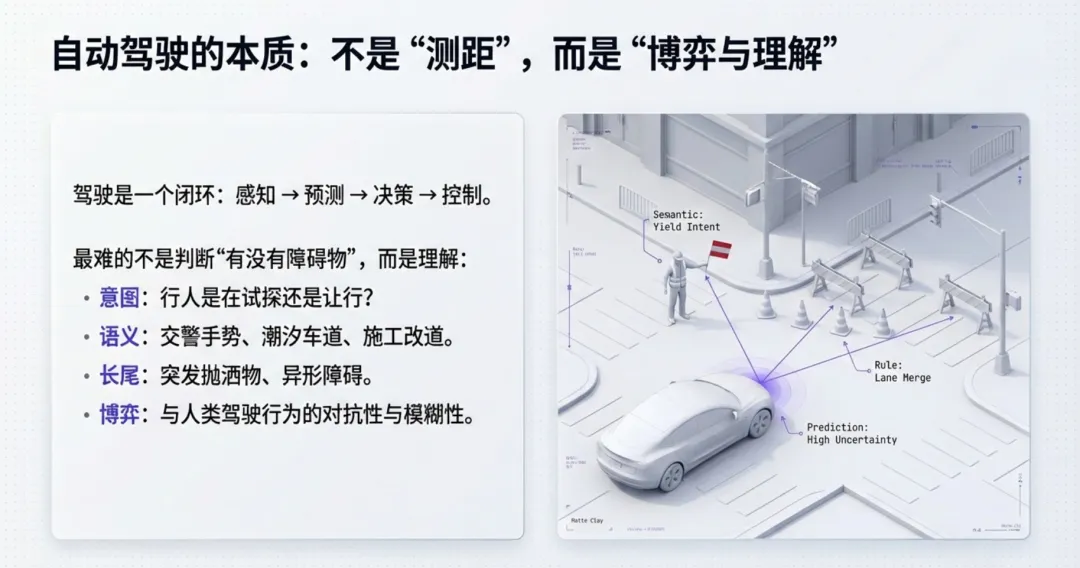
我们要先看清一个事实:自动驾驶不是“看见”就行,它是一个感知→预测→决策→控制的完整闭环。
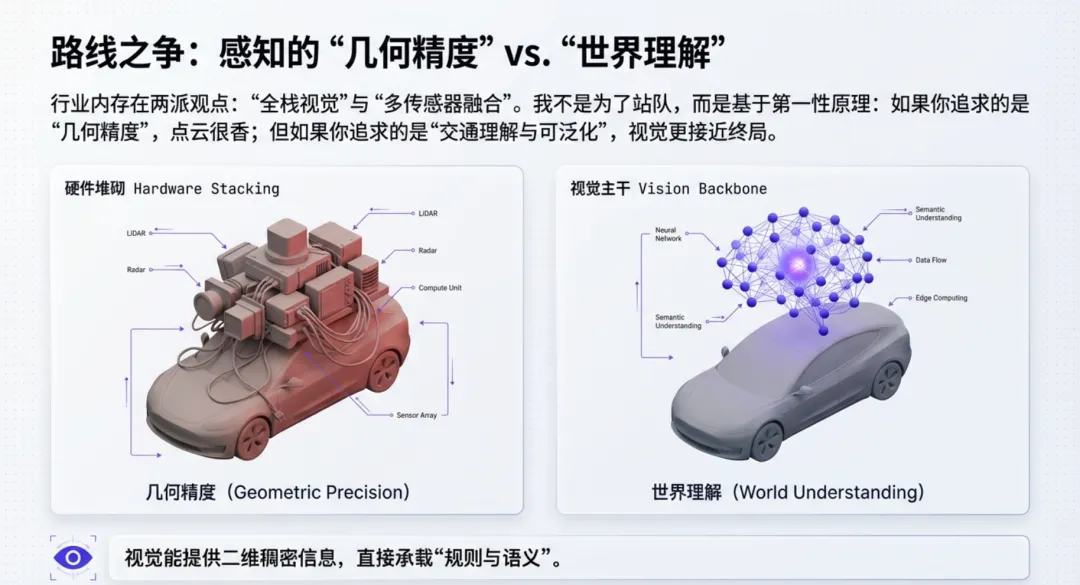
现在很多厂商宣传自己能看几百米,但这只是感知层面的“几何精度”。自动驾驶真正的瓶颈不在于测距,而在于“理解世界”。, 比如前车一个微小的试探性变道意图、施工路段交警的一个模糊手势、或者是潮汐车道上的博弈。
这些内容本质上是语义与规则的交织,是对人类驾驶行为逻辑的拆解。视觉(多相机)提供的二维稠密信息,其语义密度和可扩展性在理论上是最接近这个目标的。 相比之下,点云虽然香,但它更偏向几何描述,而视觉才承载着通往终局的“交通理解”。
激光雷达的神话,与它背后的“物理陷阱”
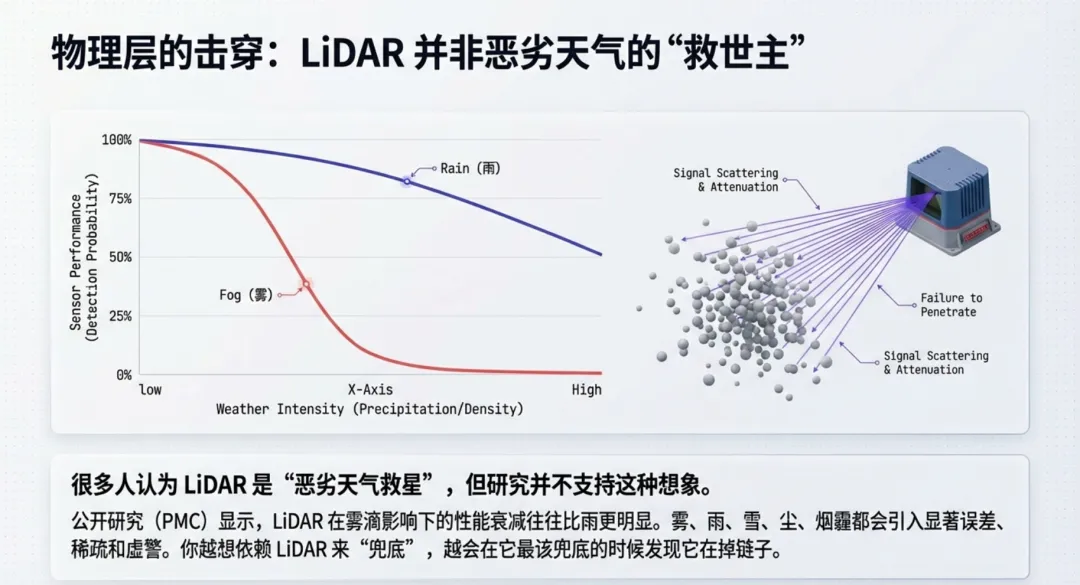
很多人把激光雷达(LiDAR)当作恶劣天气的“救世主”,觉得它能解决相机看不清的问题。但根据公开的研究建模和实测,这种“天然稳”其实是一种错觉。
首先,物理规律是不可违背的。 研究显示,LiDAR 在雾天里的性能衰减甚至比雨天更明显,点云层面会出现显著的误差、稀疏甚至虚警。 这种大气条件引起的不确定性,意味着你越想依赖 LiDAR 在极端天气下“兜底”,它越可能在关键时刻掉链子。
其次,工程上最怕的不是“看不见”,而是“看错了还很自信”。LiDAR 依然会犯错,而且错得更隐蔽:远距离稀疏会导致小目标漏检;雨雾散射会引起近距离虚警或物体轮廓膨胀;甚至不同材质的反射率(比如湿滑路面或黑色车身)都会造成形体偏差。, 这些错误不像相机模糊那样肉眼可见,它们看起来“很像对的”,这最容易误导决策系统做出致命选择。
系统复杂度的“反噬”
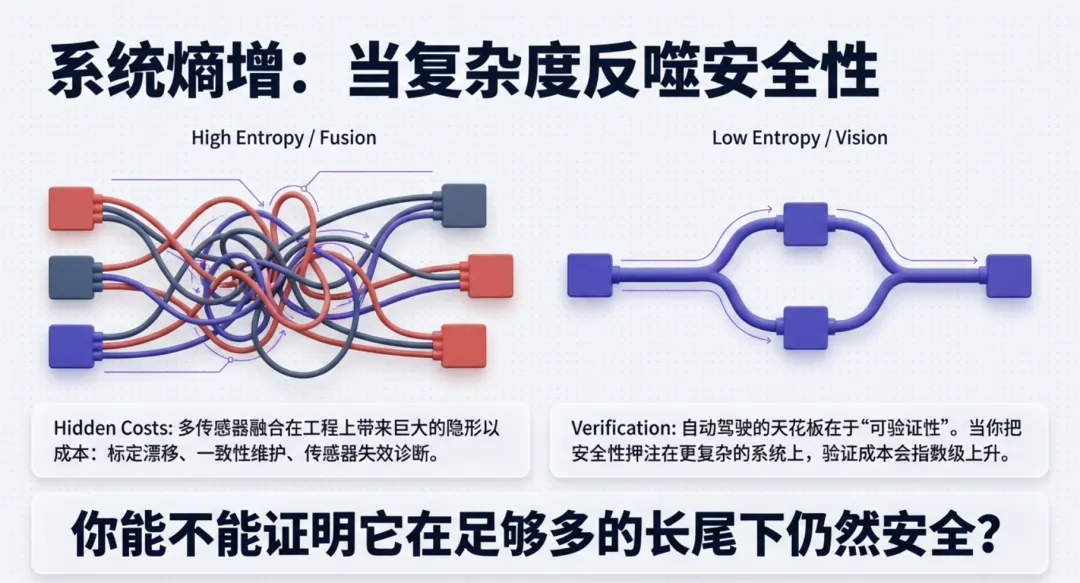
多传感器融合听起来很美好,但在工程实现上,它带来的是复杂度的指数级飙升。
标定漂移、传感器失效诊断、不同信源冲突时的决策优先级……每一个维度的增加都在考验系统的验证能力。 自动驾驶的天花板之一,就在于你能不能证明它在无数长尾场景下依然安全。 当你把安全性押注在一个无法简单证明其安全性的复杂系统上时,验证成本的暴涨最终会反噬掉技术本身的增益。
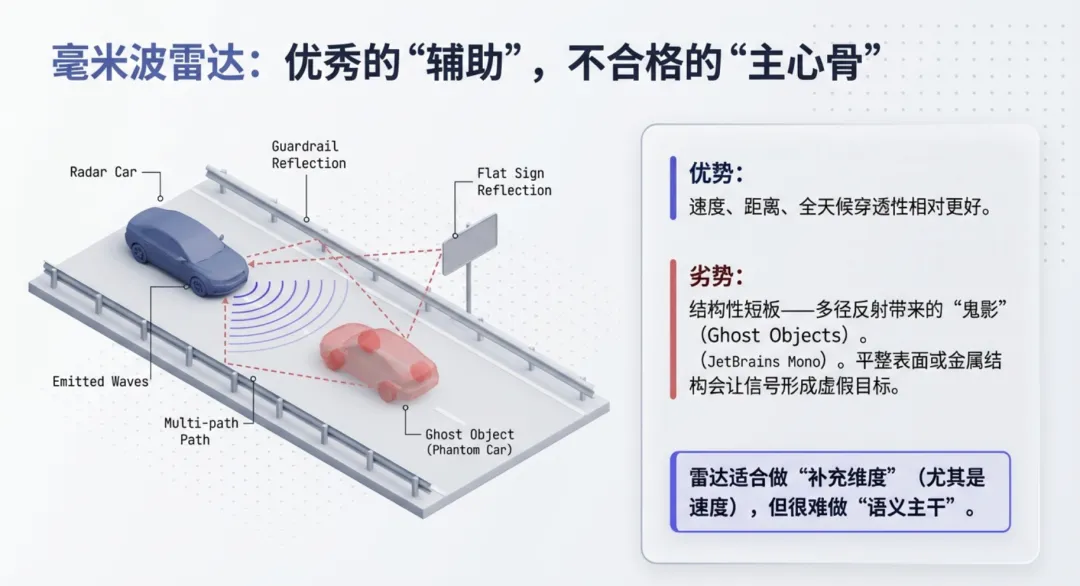
至于毫米波雷达,虽然它在测速和穿透力上有优势,但其结构性的短板同样不可忽视。比如在面对平整表面或金属结构时,多径反射产生的“鬼影”(ghost objects)依然是行业公认的顽疾。, 这决定了它只能作为补充维度,而无法成为支撑驾驶逻辑的“语义主干”。
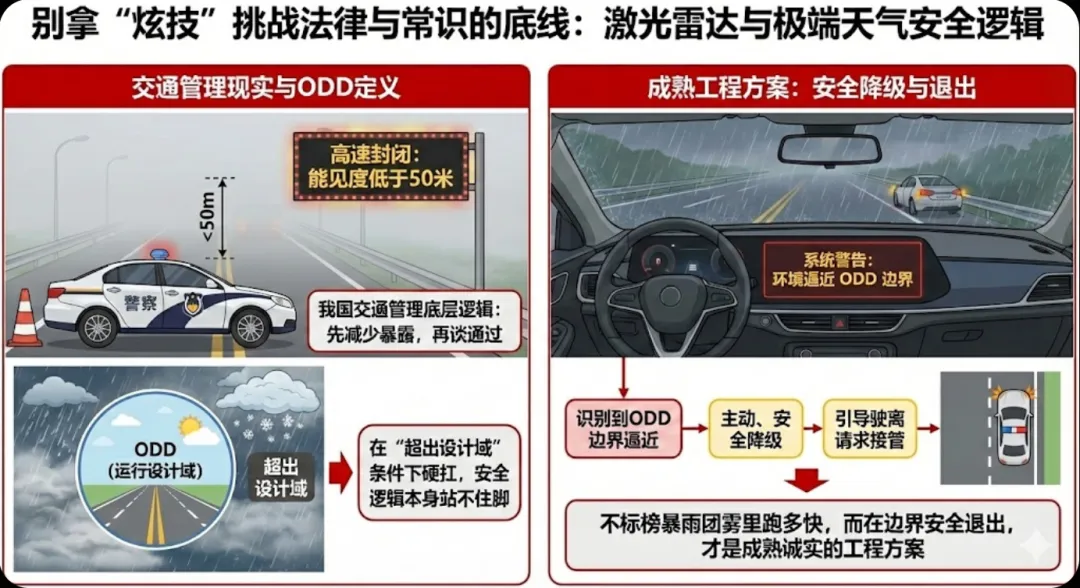
别拿“炫技”挑战法律与常识的底线
我非常不同意“激光雷达能显著提升雨雾安全”这种说法,因为它脱离了交通治理的现实逻辑。
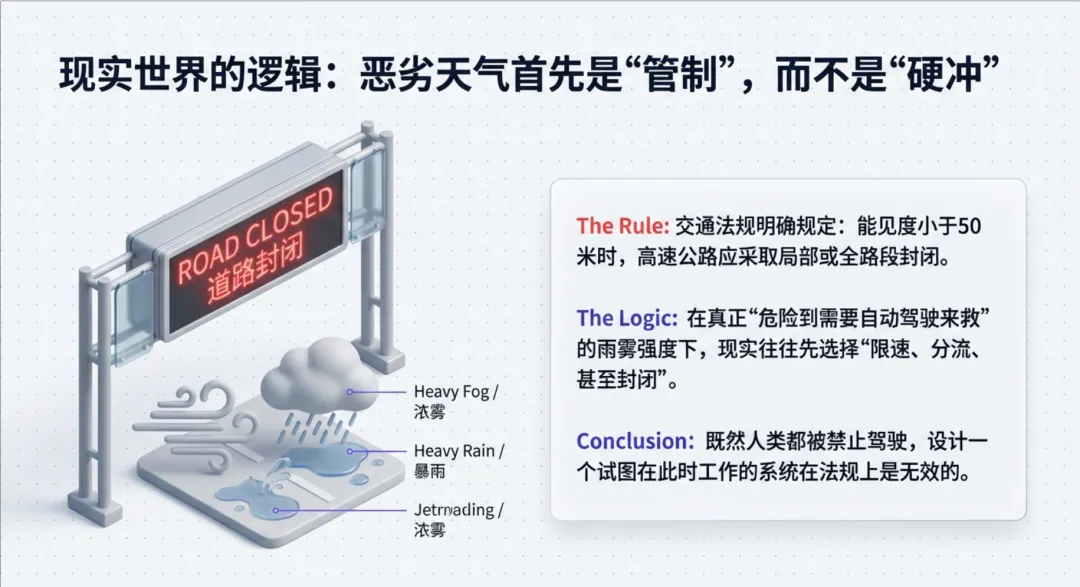
我们必须正视一个常识:在我国,当能见度小于 50 米时,交管部门通常会采取局部或全段封闭高速公路的管控措施。 交通管理的底层逻辑永远是“先减少暴露,再谈通过”。
自动驾驶系统不是全场景魔法,它必须在明确的 ODD(运行设计域) 内工作。 根据 SAE 的定义,ODD 是系统被设计可运行的特定条件集合。 当雨雾强度超过了路网的正常开放标准,让系统在“超出设计域”的条件下硬扛,这在安全逻辑上本身就是站不住脚的。
一个真正成熟、诚实的工程方案,不应该标榜自己在暴雨团雾里能跑多快,而应该在识别到环境逼近 ODD 边界时,主动、安全地选择降级、引导驶离或者请求接管。
结语:安全需要的是“可证明的倾向”
驾驶安全需要的是一种“可证明的安全倾向”,而不是“平均意义上的更好”。
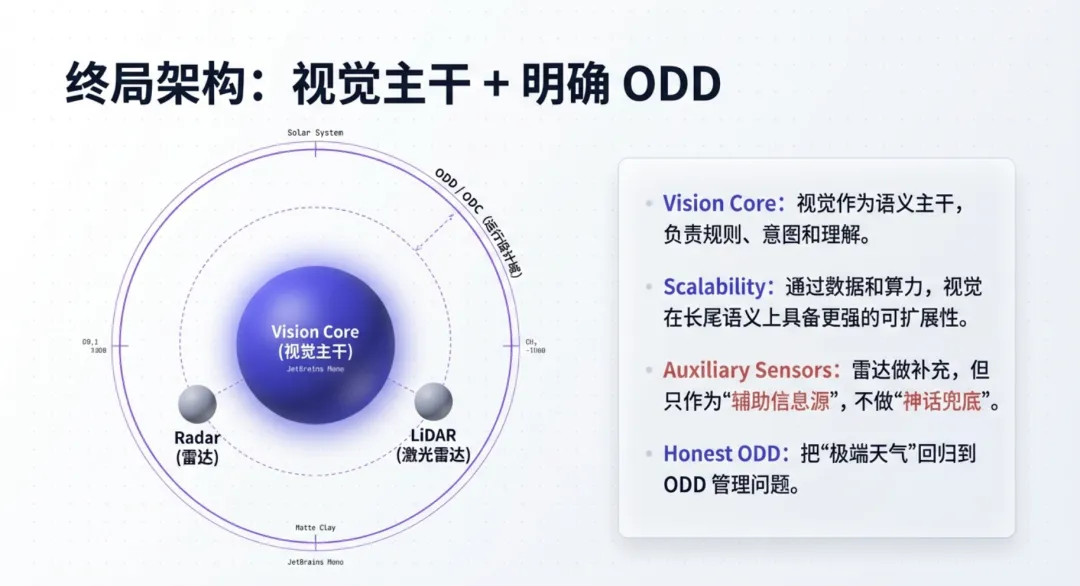
如果所谓的“兜底传感器”本身在极端条件下也会变得不可靠,那么它就很难承担起安全性叙事的主角。 我所主张的未来路径,是回归到更本质的逻辑:
- 以视觉为语义主干,去深挖交通要素与人类意图的理解;
- 回归工程诚实,把极端天气当作 ODD 管理问题,而不是炫技的赛道。
传感器不是信仰,安全也不是口号。真正高级的安全感,不是因为你带了三把伞,而是因为你清楚地知道什么时候该避雨,并且有能力安全地走到屋檐下。








 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
