百度 Apollo 车路协同自动驾驶在全面满足行业已发布标准的基础上,结合已落地项目开展了大量 V2X 车路协同应用测试验证和先导示范,以下列举出 3 个大类 7 个典型协同感知应用场景。
典型车路协同自动驾驶应用场景举例
1 全量交通要素感知定位
基于 Apollo 车路协同规模化测试验证和示范运营积累,百度在智能道路方面具备对全量交通要素(包括机动车、非机动车、行人、障碍物等)的实时准确感知能力,交通要素感知的准确率、位置精度、端到端全链路时延等指标达到了 C4 级高等级智能道路标准,核心指标符合表 3.2 要求,比如感知定位达到 0.5m(均值)、速度大小精度 1.5m/s(均值)、感知对象漏检率<2%、路侧对象感知端到端时延≤200ms(99 分位)、数据发送频率 10-20Hz 等。
同时,为了满足与 L4 级自动驾驶车辆进行车路协同感知的要求,实现交通要素对象级位置融合和速度融合,Apollo 车路协同在路侧感知方面专门开展了零速检测准确性优化、速度波动优化、静转动时延的专项优化等一系列专项优化,最终实现了 VICAD 动静态盲区融合感知、车辆超视距融合感知、路边低速车辆检测等一系列高难度复杂场景感知识别。
1.1 动静态盲区/遮挡协同感知
AD 盲区问题描述:
受限于单车智能的传感器感知角度限制,在出现静态障碍物或动态障碍物(如大型车辆)遮挡时,自动驾驶汽车(Autonomous vehicles,AV)主车难以准确获取盲区内的车辆或行人的运动情况。
VICAD 动静态盲区协同感知:
通过路侧多传感器部署,实现对多方位、长距离连续检测识别,并与 AV 主车感知进行融合,实现自动驾驶车辆对盲区内车辆或行人的准确感知识别,车辆可提前做出预判和决策控制,进而降低事故风险。
具体案例:
(1)左转 / 掉头盲区或遮挡协同感知:如图所示,AV 主车(蓝白色)在路口左转或掉头时,有大卡车或公交车(粉色长多边形)产生了动态盲区遮挡住了后面的车辆,通过 VICAD 全量协同感知,AV 主车车辆可以获取盲区车辆的运动情况,避免了车辆急刹或事故的风险。
左转/掉头盲区或遮挡协同感知
(2)大车遮挡协同感知:在 AV 主车直行时,右侧大车遮挡住了横穿的电动车,通过 VICAD 动静态盲区协同感知,车辆可以提前获取盲区车辆、非机动车或行人的运动情况,避免了车辆急刹或事故的风险。如图所示。
动静态盲区非机动车/行人鬼探头协同感知
(3)路口遮挡协同感知:在复杂路口,很容易出现大车遮挡小车,影响车辆感知,通过 VICAD 路口全量感知,车辆可以提前获取路口内全量车辆、非机动车或行人的运动情况,避免了车辆急刹或事故的风险。如图所示。
1.2 车辆超视距协同感知
AD 超视距感知问题描述:
受限于车载传感器的类型、感知范围、分辨率等因素,AV主车对超出车载传感器覆盖范围的交通运行状况、交通参与者或障碍物检测结果不稳定,容易出现类型跳变等问题。
VICAD 超视距协同感知:
通过路侧多传感器部署,实现对多方位、长距离连续检测识别,并与AV主车感知进行融合,实现自动驾驶车辆对超视距范围内车辆或行人的准确感知识别,车辆可提前做出预判和决策控制,进而降低事故风险。
具体案例:
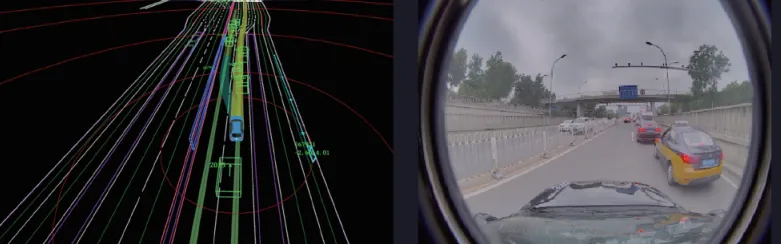
如图所示,两张图片是同一时刻的车端和路侧检测与车融合后的结果。在中,AV主车(蓝白色)很难对较远处的障碍物进行稳定检测(行驶路径上没有障碍物显示),容易造成急刹和事故的风险。在图中,通过VICAD超视距协同感知,车辆可以提前获取前方车辆、非机动车或行人的运动情况(路径附近的粉色筐),避免了车辆急刹或事故的风险。
超视距协同感知
1.3 路边低速车辆检测
AD 超视距感知问题描述:
受车端传感器感知视角及车辆实时运动等因素的影响,AV 主车对路边低速车辆检测的速度估计不准,如路边缓慢倒车、路边车辆驶出等,造成潜在碰撞或急刹风险。
VICAD 超视距协同感知:
通过路侧多传感器部署,实现对道路多方位、长距离连续检测识别,并与 AV 主车感知进行融合,实现自动驾驶车辆对低速车辆或行人的准确感知识别,车辆可提前做出预判和决策控制,进而降低事故风险。
具体案例:
AV 主车直行时,有 VICAD 协同感知的情况下,对路边缓慢驶出车辆可以进行稳定检测,准确获取车辆速度、位置等信息,发送到 AV 主车进行融合感知定位,进而避免了 AV 主车急刹或事故的风险。如图所示。
路边低速车辆协同感知
2 道路交通事件感知定位
自动驾驶车辆需要对各类交通事件(如违章停车、“死车”、排队、施工、遗撒等)进行实时准确感知识别,但是交通事件往往具有一定的复杂性、实时性,仅依靠车辆很难进行准确全面的识别定位,车端由于观察的角度、视距时长受限,面对违章占道停车、“死车”等场景,难以对交通态势进行及时的语义判断,使得车辆刹车或变道距离短,容易造成急刹。百度 Apollo 车路协同通过 C4 级智能道路对背景建模实现交通态势的语义判断,进行交通事件实时感知,为 L4 级自动驾驶车辆提供交通事件协同感知服务,让车辆提前进行预判和决策控制,如变道绕行、停车,避免急刹或事故等风险,保障自动驾驶车辆安全。
具体案例:
(1)违章停车、“死车”等交通事件识别:AV 主车前方有大车“死车”并停占两个车道,临近路口 AV 主车无法判断前方信息而停滞不前。通过 VICAD 交通事件协同感知,可以长时间对道路车辆进行跟踪和预测,及时将死车事件播发给AV 主车,AV 主车可以及时做出变道等决策。如图所示。
大车“死车”交通事件协同感知识别
(2)排队交通事件识别:跟车状态下,前方路口红灯,直行车辆出现排队现象;而 AV 主车此时因为无法判断前车停止原因(排队中),因此会选择往左侧(左转车道)并线超车 ;然而临近路口时,却因为车道中的排队车辆而无法再并线回原车道。
通过 VICAD 交通事件协同感知,及时发现前方排队事件,并将排队事件及时发送给 AV 主车,AV 主车根据排队信息做出不变道超车并在车道内排队等候的决策。如图所示。
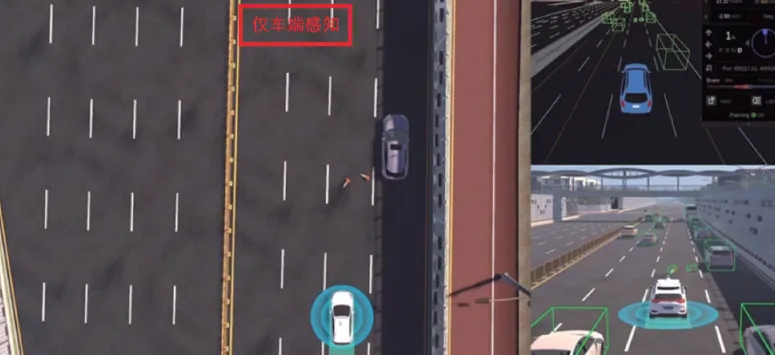
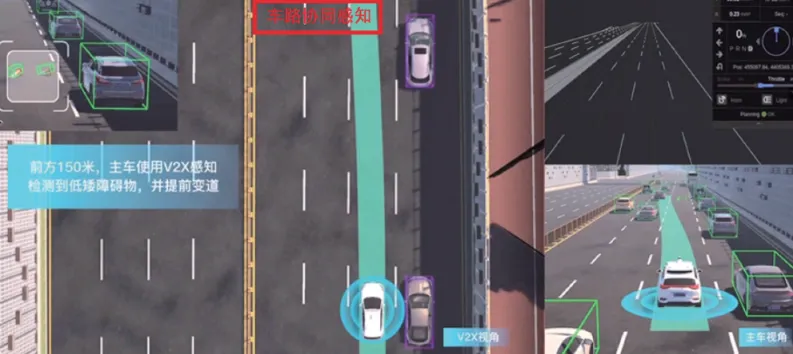
(3)道路遗撒(施工锥筒、货物等)事件识别:AD 车辆的感知视角有限,对低矮障碍物的准确检测需要较近距离才能实现,容易造成车辆急刹,如图 4.12 所示。通过 VICAD 交通事件协同感知,可对道路遗撒低矮障碍物进行有效检测,并通过 V2X 远距离提前发送给车辆,提前进行预判和车辆决策控制,如变道绕行。如图所示。
仅依靠AD车端感知无法在远距离对遗撒交通场景精确识别
基于VICAD协同感知的遗撒交通事件识别
3 路侧信号灯融合感知
通过 VICAD 协同信号灯感知识别,将信号灯灯色和倒计时数据实时发送到车端,路侧识别信号灯灯色和倒计时数据的准确率、端到端时延等满足 C4 级道路指标要求,如表 3.2 所示,核心指标如路侧信号灯灯色倒计数识别准确率不低于99.9999%,信号灯端到端时延低于 200ms,数据发送频率不低于 8Hz。
具体案例:
AD 信号灯感知问题描述 :信号灯数据获取是自动驾驶必须解决的问题,单车智能主要通过视觉 AI 获取,但仍存在很多不足 :
(1)识别信号灯能力有限,异形信号灯无法识别;
(2)车端视角限制,容易被前车遮挡;
(3)容易受外界环境限制,尤其是逆光、雾天、扬尘、夜晚等环境;
(4)识别的数据维度有限,倒计时信息识别不准。
VICAD 超视距 / 遮挡信号灯协同感知:VICAD 协同感知主要是通过 IoT 信号灯数据接入、路侧多视觉融合感知等技术获取信号灯灯色和倒计时信息,经数据融合处理后,通过 V2X 发给自动驾驶车辆。VICAD 信号灯协同感知的优势:
(1)获取方式不受灯的外观、环境影响;
(2)获取到的数据内容丰富(包括灯色、倒计时);
(3)车辆可在很远的距离提前获取信息,提前进行决策控制。
具体案例:
前方大车遮挡信号灯时(如图 4.14 所示),可通过 VICAD 信号灯协同感知实时获取准确的路口信号灯灯色和倒计时数据,以便车辆提前做出预判和决策控制,避免出现闯红灯或者急刹。
信号灯遮挡场景




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
