Pre-Instruction for Pedestrians Interacting Autonomous Vehicles With eHMI: Effects on Their Psychology and Walking Behavior
行人与eHMI自动驾驶汽车交互的预指导:对他们心理和行走行为的影响
作者:Hailong Liu,Takatsugu Hirayama
1.引言
随着自动驾驶车辆(AVs)的普及,行人与AV之间的交互将日益频繁。在传统驾驶车辆(MV)与行人的交互中,双方通过隐性沟通(如车速、加速度、方向)和显性沟通(如手势、眼神接触)来理解彼此意图,达成通行协商。然而,在AV中,驾驶员可能不参与驾驶任务,导致行人难以理解AV的意图,进而引发安全隐患、效率低下和社交不适等问题。为解决这一问题,外部人机页面(eHMI)就被提出,作为AV与行人之间的显性沟通手段。已有研究探讨了通过灯光、图标和文字等方式呈现AV意图的eHMI设计,但仍存在一个关键问题:行人缺乏对eHMI的理解经验,可能导致他们对AV意图的误解。
为此,本研究通过预指导来帮助行人建立对eHMI的正确理解,进而改善其与AV交互时的心理状态与行走行为。研究基于认知-决策-行为模型,强调行人的情境意识、风险评价和行为决策三个关键过程,预指导的目的在于校准行人的心理模型,使其能更准确地理解与预测AV行为。
2.研究目的
本研究的主要目的是验证eHMI预指导对行人在与AV交互过程中的主观感受与行走行为的影响。具体目标包括:
(1)验证预指导是否能提升行人对AV意图的理解和预测能力;
(2)分析预指导是否能使行人的行走行为更加一致;
(3)比较四种交互场景下(MV、AV无eHMI、AV有eHMI、AV有eHMI+预指导)行人的心理与行为差异。
3.研究方法
3.1理论基础与假设推导
本研究紧密围绕如图1所示的认知-决策-行为模型展开,它将行人与车辆的交互过程分解为三个关键阶段:情境意识、风险评价与决策与行为。本研究创新性地将预指导作为校准行人心理模型的干预手段引入该框架,基于此理论,研究者推导出两个可检验的核心假设:
H1:通过预指导正确理解eHMI原理的行人,在交互中会表现出更优的情境意识、主观感受和决策能力。
H2:随着行人通过预指导全面理解eHMI原理,他们在多次交互中的行走行为会变得更加一致。
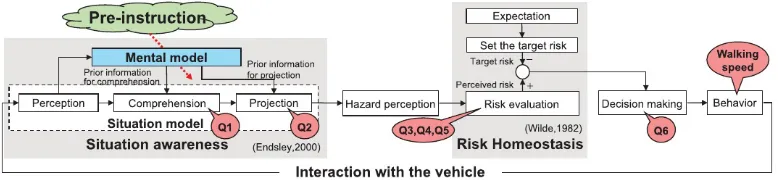
图1 认知-决策-行为模型示意图
3.2实验者
共有32名参与者(15名男性,17名女性)以行人的身份参加了本次实验,年龄范围为23~68岁(平均值:49.12,标准差:11.13)。
3.3实验设置
实验通过在左侧车窗贴反光膜完美隐藏真实驾驶员,并在右侧安装假方向盘和假人,成功营造了无人驾驶的视觉效果;eHMI安装在右前挡风玻璃,显示“動きません”(我不动的意思),如图2所示。实验场景模拟停车场行人过街,如图3所示,车辆以约4km/h行驶。
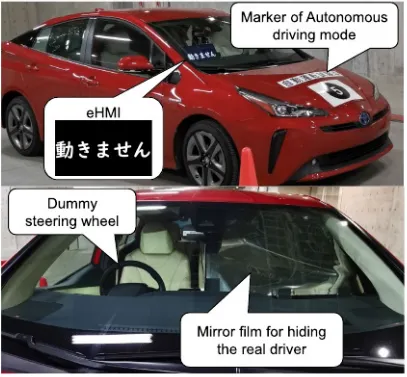
图2 配备eHMI的实验车
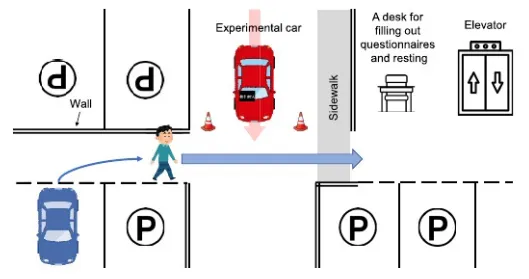
图3 实验场景
3.4实验设计
研究采用了受试者内设计,这意味着所有32名参与者都经历了图4中的全部四种实验场景。
(1)MV:模拟传统人车交互。隐藏的真实驾驶员控制车辆,假人驾驶员在停车后做出明确的“您先请”手势。
(2)AV w/o eHMI:模拟无任何显性通信的AV。车辆自动停车,无eHMI,无驾驶员,行人仅能依靠车辆动力学(隐性通信)判断意图。
(3)AV w/ eHMI:引入eHMI。车辆停车后,eHMI显示“動きません”,行人通过后闪烁两次表示即将启动。
(4)AV w/ eHMI after PI:在场景3的基础上,引入核心干预——预指导,然后再次进行与场景3相同的交互。
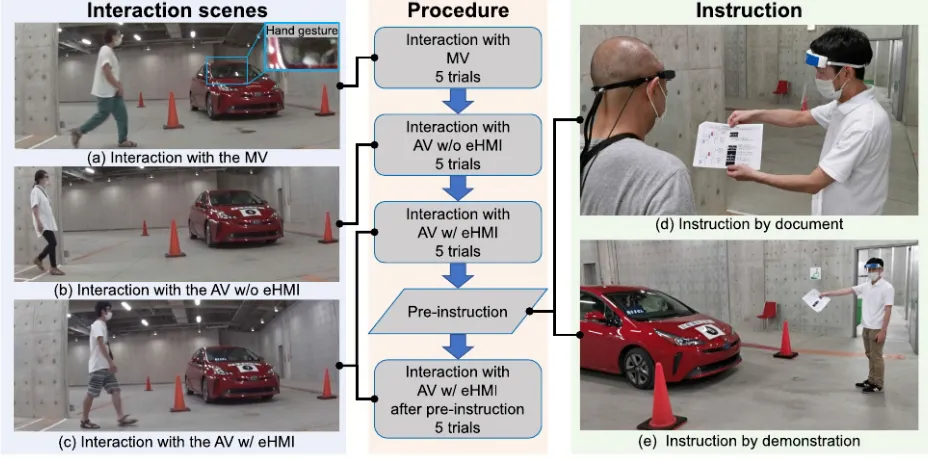
图4 实验程序
3.5数据收集
研究采用了主观评价与客观行为数据相结合的多维度测量方法。
(1)主观评价
基于理论模型,设计了6个具体的5点量表问题(Q1-Q6),如图5所示,分别对应模型中的不同构念。
1)情境意识:Q1(理解)、Q2(预测)
2)风险评价:Q3(危险感)、Q4(信任)、Q5(安心感)
3)决策:Q6(犹豫程度)
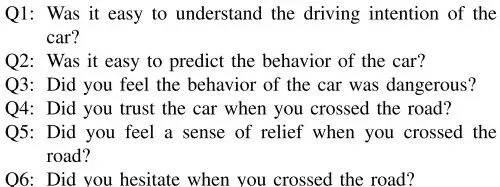
图5 主观问题
(2)行走行为
通过侧方摄像机记录行人过街全程(60帧/秒),如图6所示采用OpenPose算法从每帧视频中提取25个身体关节点,选取最稳定的颈部关节点作为行人位置的代理。通过颈部点在连续帧间的位移,根据式(1)计算瞬时行走速度。
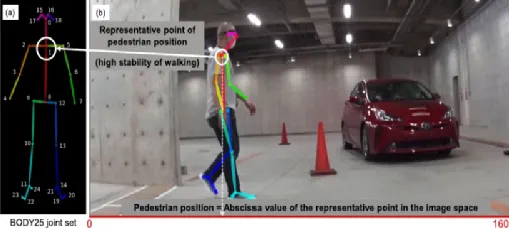
图6 使用OpenPose对参与者的步行行为进行估计
关于时间对齐,以车辆停止时刻(0s)为基准,分析[-1s,+3s]时间窗内的速度,其关键指标为平均速度和速度标准差。
4.研究结果
4.1主观评价
如表1所示,在Q1至Q6所有六个问题上,“AV w/o eHMI”都显著差于“MV”,因此可以得到AV无eHMI时,行人的主观感受最差。
表1 通过双侧wilcoxon进行事后多重比较结果表
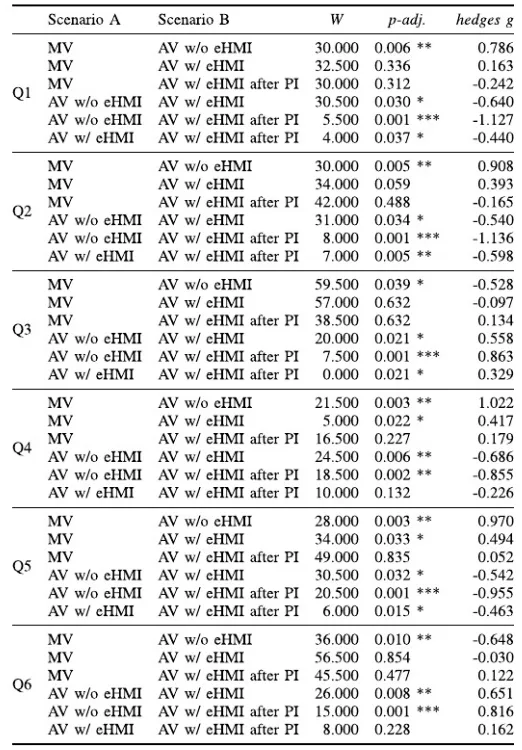
如图7所示,“AV w/ eHMI”的箱线图位置相较于“AV w/o eHMI”有显著上移,点线图中的线条也呈现出明显的向上趋势,因此得出eHMI能显著改善行人的主观感受;且“AV w/ eHMI after PI”的箱线图与“MV”的箱线图位置高度重合,从而得到预指导能进一步优化eHMI的效果,使其达到与人驾驶车辆相当的水平。
综上,H1(通过预指导正确理解eHMI原理的行人,在交互中会表现出更优的情境意识、主观感受和决策能力)成立。
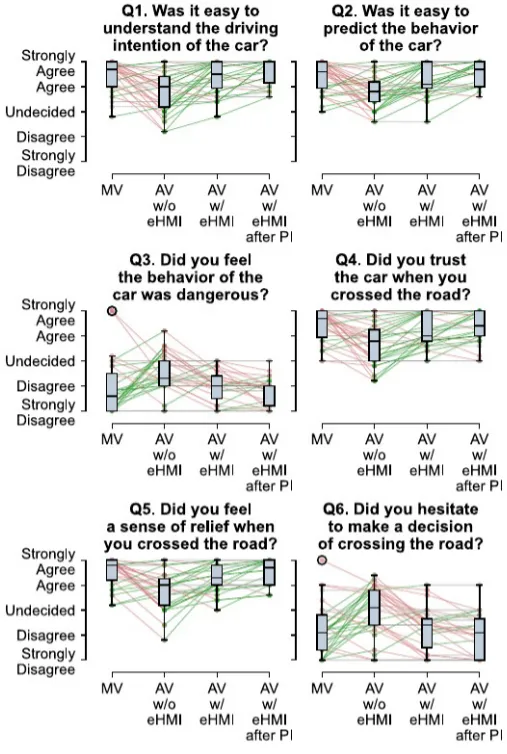
图7 箱形图和成对点图可视化主观评价
4.2行走行为
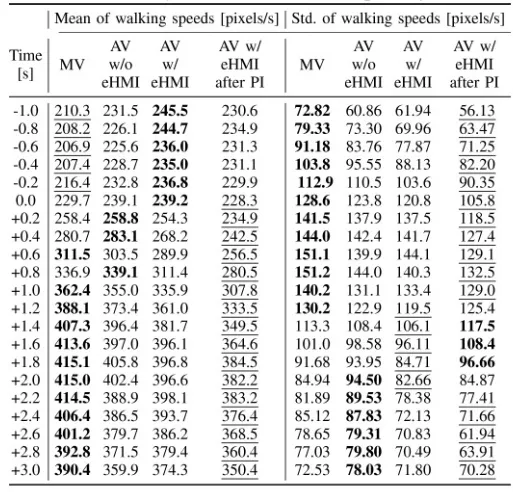
如图8行走速度随时间变化曲线中代表“AV w/ eHMI after PI”的那条线,其阴影部分(表示变异范围)应该是最窄的,表明每个人的速度曲线都紧密聚集在平均值附近;并且在表2中,在[-1.0s, 1.0s]和[2.2s, 3.0s]这两个关键时间段内,“AV w/ eHMI after PI”的速度标准差是所有场景中最低的(表中带下划线的数值代表最小值);由此可得预指导使行人的行走行为更一致、更可预测。
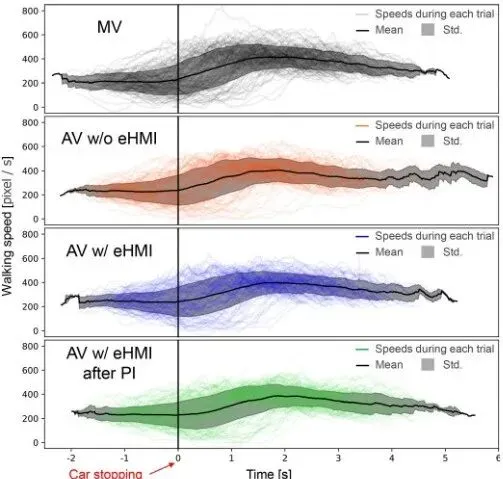
图8 四种场景5次试验中27名行人的行走速度
表2 步行速度的平均值和标准偏差
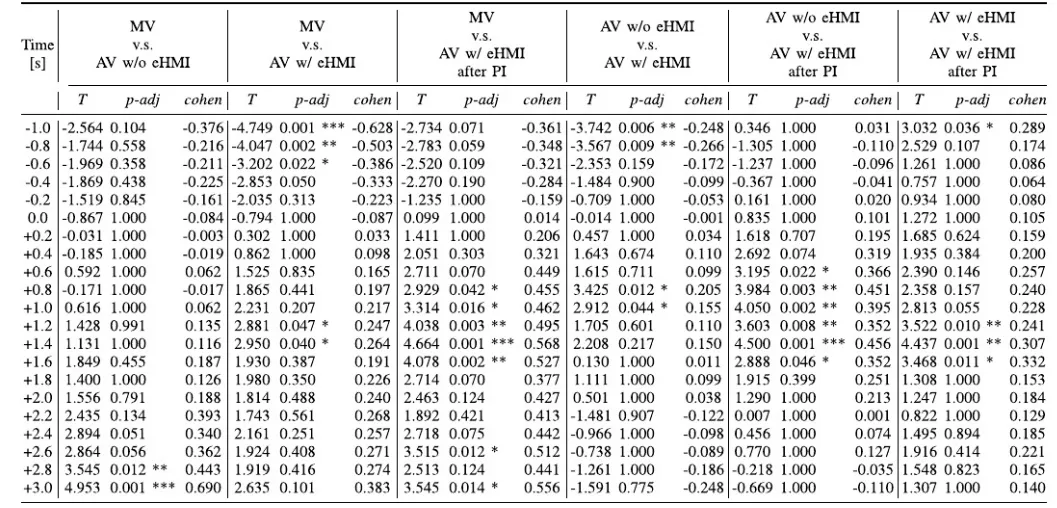
如表3所示,“AV w/ eHMI after PI”的整体平均速度显著低于“AV w/ eHMI”;同样在表4中显示在车辆停止后的0.8s至1.6s内,“AV w/ eHMI after PI”的速度显著低于“MV”;因此可得预指导使行人的行走速度更慢、更从容。
表3 重复测量的双向方差分析

表4 配对t检验对行走速度影响的四种场景在时间点内的简单主效应
综上,H2(随着行人通过预指导全面理解eHMI原理,他们在多次交互中的行走行为会变得更加一致)成立。
5.结论
本研究通过现场实验设计,系统比较了行人在四种不同交互情境(手动驾驶车辆MV、无eHMI的自动驾驶车辆AV、有eHMI的AV以及接受eHMI预先指导后有eHMI的AV)下的心理感受与行走行为变化。结论如下:
(1)在无eHMI的AV交互中,行人难以理解车辆意图、预测其行为,主观安全感、信任感及决策信心均显著下降,导致过路犹豫增加。
(2)使用基于文本的eHMI能显著提升行人对AV意图的理解与行为预测,改善其安全感、信任感与决策效率,但其效果仍不及MV中驾驶员手势沟通。
(3)通过eHMI的预先指导(包括文档说明与实际演示),行人能建立正确的AV交互心智模型,其情境意识、主观感受与决策信心可提升至与MV交互相当的水平。
(4)预先指导使行人在多次交互中行走速度更趋于一致,表明eHMI在信息引导方面具有稳定行人行为的作用,有助于降低交互不确定性。
6.参考文献
Liu, H., & Hirayama, T. (2025). Pre-Instruction for Pedestrians Interacting Autonomous Vehicles With eHMI: Effects on Their Psychology and Walking Behavior. IEEE Transactions on Intelligent Transportation Systems.
7.点评
本研究通过现场实验,系统检验了预指导对行人与具备外部人机交互界面(eHMI)的自动驾驶车辆(AV)交互时心理与行为的影响。其核心贡献在于:即使一个语义明确的文本eHMI,若缺乏对系统原理(如触发条件、显示逻辑)的事先说明,行人仍难以形成准确的心智模型,导致理解困难与主观风险上升;而简明的预指导能有效校准行人的心智模型,使其情境意识、信任感与决策信心恢复至与人类驾驶车辆交互相当的水平,并使过路行为更趋一致。因此该研究为实现安全、顺畅的人车交互提供了关键的教育干预策略。然而,研究存在局限,其实验场景与eHMI形式较为单一,结论能否推广至更复杂交通流及动态eHMI(如灯光、图标)尚待验证。未来研究需在真实混合交通场景中验证预指导的长期效果,并探索如何将eHMI原理高效、规模化地传递给公众。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 冯桂洲
审核丨 刘军
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
