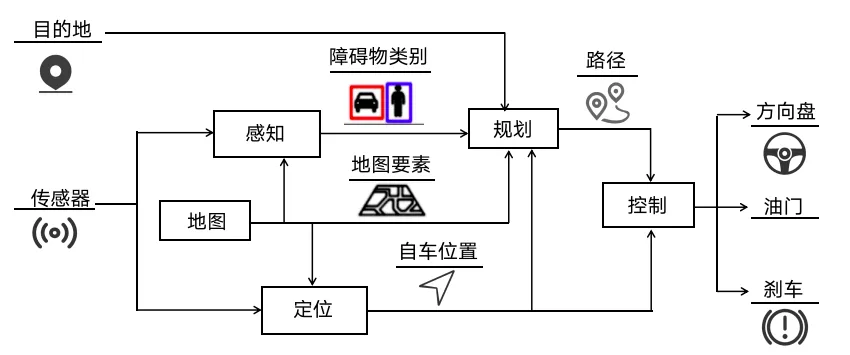
规划控制是自动驾驶的核心模块之一,它的主要作用是:感知周围的路况,进行路径规划,并按照实际情况做出最合理的决策。决策后,车辆会规划一条新的轨迹进行行驶。
根据上游决策的结果,运动规划模块实时输出舒适安全的轨迹信息以及速度、加速度和方向盘转角信息,交由控制模块执行。
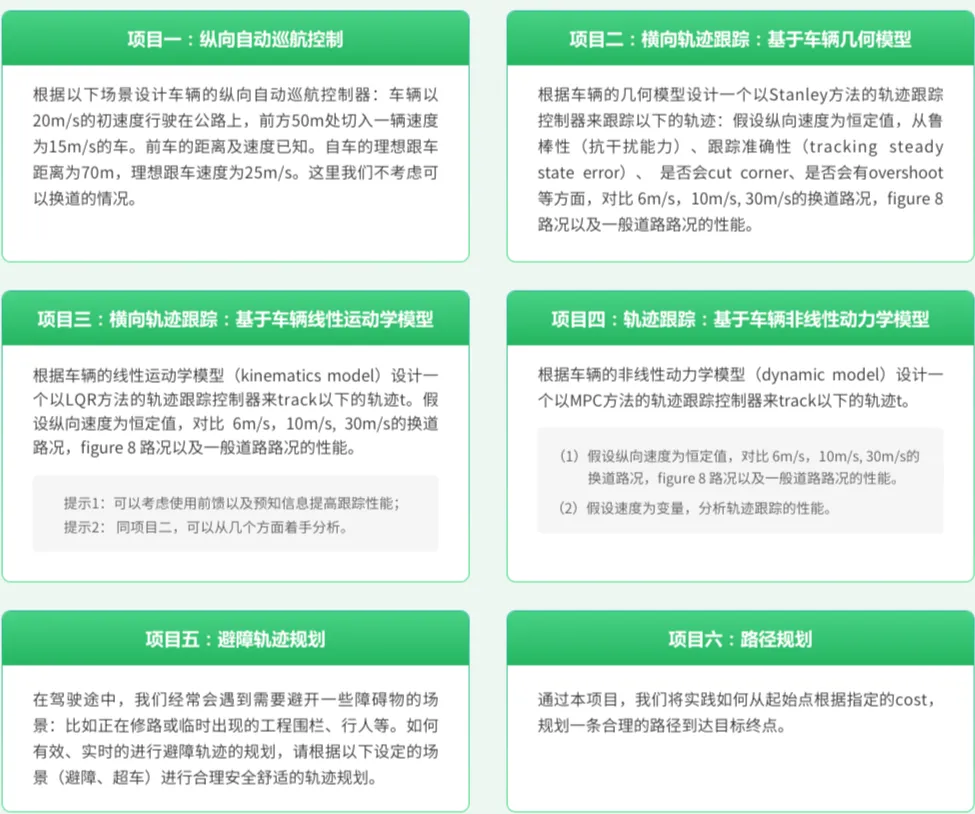
目前企业界的主流规控算法包括PID, LQR, MPC等控制算法,以及A*,Dijkstra,有限状态机,Markov决策, Lattice planner等规划算法。网络上有比较多的博客介绍这些算法的大概思路,但理论讲解与C++代码实现结合的内容少之又少。
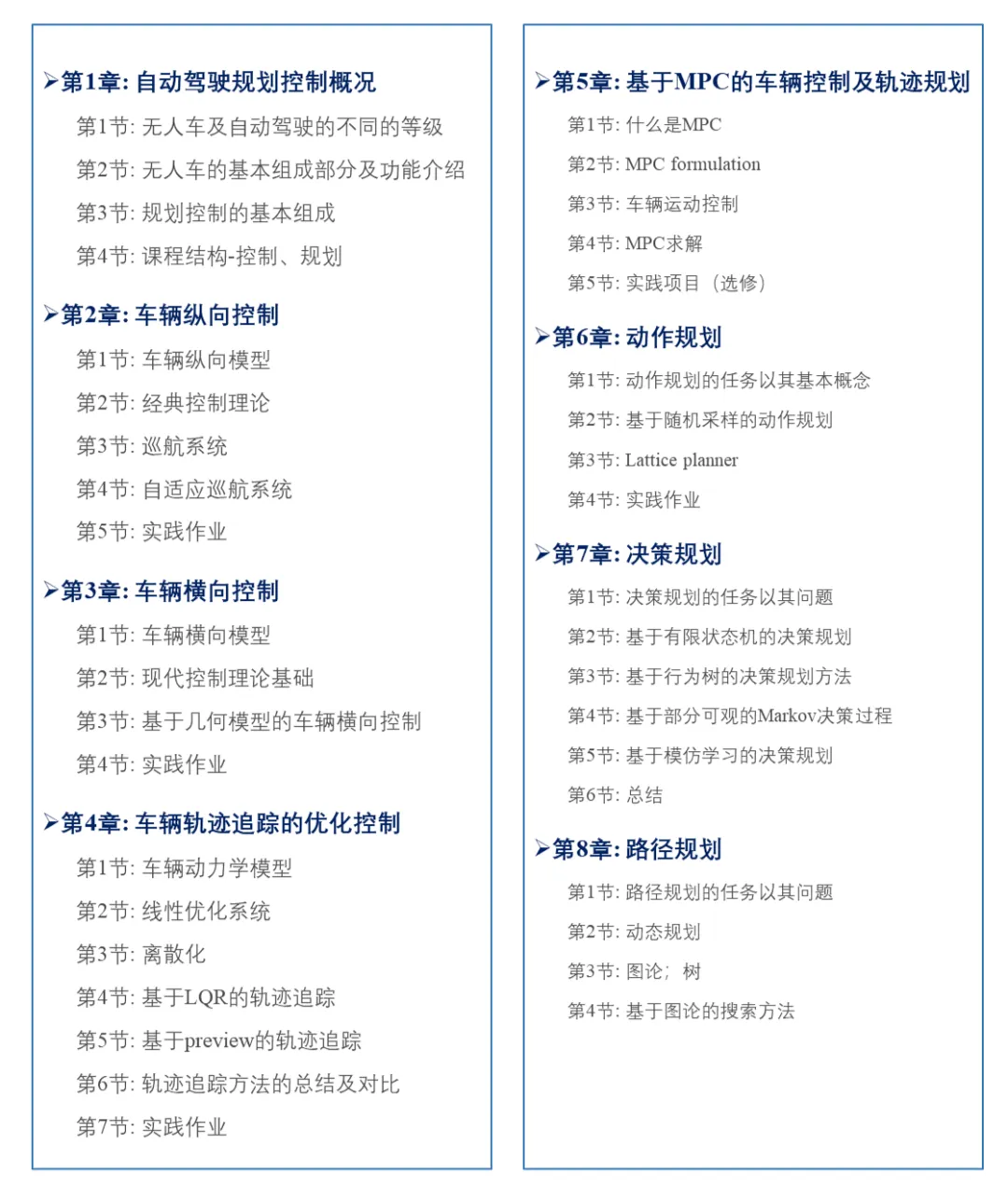
为了便于大家学习,深蓝学院邀请了具有10年以上规划控制研发经验的乌宁博士,开设了《自动驾驶控制与规划》线上课程。
扫码添加,了解详情
抢占学习名额