鄂尔多斯市卡尔动力科技有限公司
案例概述
针对自动驾驶重卡在复杂交通环境中的模块割裂、规则依赖、时序建模不足及意图安全缺陷等痛点,通过采用多任务深度学习模型、进行统一预测与规划,实现了一体化、低延迟、拟人化且安全冗余的技术突破,满足了行业对高效、精准、安全驾驶系统的需求。应用效果显著,卡车编队车距精确到10厘米,省油15%;路口通行成功率提升至99%,提升物流效率、降低事故风险。目前已落地应用于城市道路、高速公路等场景,未来将扩展到更多领域。
技术方案
需求分析:
当前自动驾驶重卡在复杂交通环境中面临四大核心痛点,亟需一体化、低延迟、拟人化且安全冗余的技术突破。
一是模块割裂,他车预测与自车规划独立运行,导致信息断层、延迟高、效率低;
二是规则依赖,传统规划算法依赖人工调参,CPU消耗大、泛化性差,难以应对复杂交互;
三是时序建模不足,现有方法丢失时序细节或延迟过高,且未建模他车与自车的动态交互关联;
四是意图与安全缺陷,多模态预测缺乏语义意图,对鬼探头等长尾行为的安全响应不足。
随着自动驾驶技术成熟,企业对自动驾驶系统要求更高。传统独立轨迹预测与运动规划模块难以满足复杂交通场景的实时性和高效性。行业需求侧重统一建模框架,减少模块割裂,提高预测与规划系统精度和效率,适应多样化驾驶行为和复杂场景。对高效计算、低延迟和高安全性需求不断增长,推动新型算法和技术探索应用。
大模型技术方案:
传统自动驾驶技术采用单目标轨迹预测、传统规划与控制的串行链路,存在模块割裂、响应延迟等问题。本案例创新性地将其替换为“场景目标轨迹预测+自车轨迹规划”的多任务深度学习模型,构建了一个端到端的统一深度学习网络。
该模型首先通过编码器融合高精地图、周边环境、车辆状态及历史轨迹等多模态场景信息;随后在解码器中强化时序交互建模,增强自车在复杂交通场景中的交互与博弈能力,最终并行输出预测与规划结果。
该一体化架构从根本上消除了模块间的信息隔阂,减少信息损失与误差传递,降低对人工规则的依赖,提升算法迭代效率、系统安全性与智能化水平;同时通过基于决策意图的多模态规划机制,显著增强系统在多样化场景中的适应能力。
主要能力:
采用端到端低延迟多任务统一模型,实现预测与规划协同优化,城区场景延迟低于80ms,高速场景延迟低于50ms,GPU利用率低于20%,显存需求下降40%。
支持多模态轨迹预测,未来5秒内轨迹终点误差控制在3m内,转向意图识别准确率超93%。
采用模仿学习与强化学习融合架构,实现低碰撞概率、高避障成功率,优化驾驶平顺性,提升通行效率。模型泛化性能强,适配新路线、车型及编队模式。
提出轨迹预测与运动规划多任务统一建模框架,紧密集成协同优化。融合深度学习、图神经网络等多种先进算法,精准建模复杂环境。通过优化设计,构建高性能、高鲁棒性系统。
该大模型通过仿真验证,进入实车测试,已在城市道路、高速公路等场景落地应用。物流编队车间距达10cm级,燃油降低15%;路口通行效率提升30%,误减速降50%,未来将扩展到更多领域。经济效益上,预计降低L4级自动驾驶系统40%维护成本、80%新路线迁移开发成本。社会效益上,减少30%交通事故风险,优化城市交通流量,助力绿色低碳出行。
备注:案例内容均来自于各单位提供,仅供参考
L2+/L4智能重卡销售运营方案请联系188 8327 2008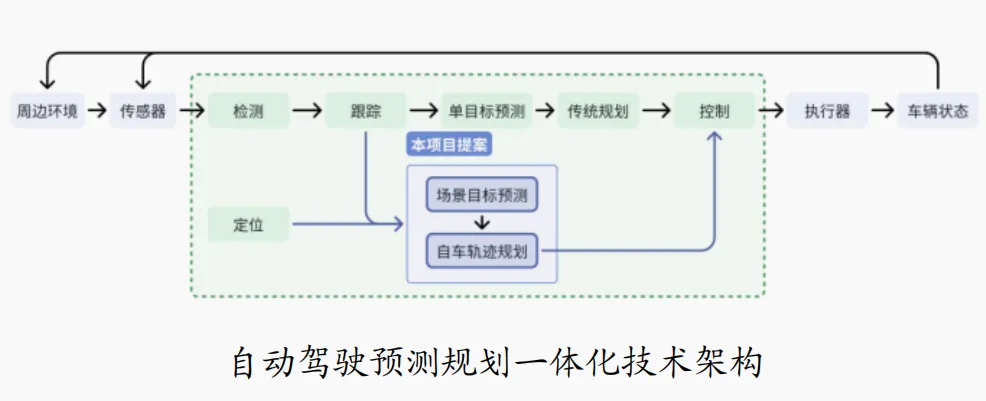

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
