自动驾驶的技术路线,越来越收敛了......
- 2026-02-28 01:16:21
点击下方卡片,关注“自动驾驶之心”公众号
2025年是自动驾驶走向成熟的一年,其中最关键的变量就是端到端和世界模型。
一年时间的进化,自动驾驶不再是“探索期”。从早期特斯拉的一骑绝尘,到现在国内诸多车企的量产冲刺。
更关键的是,自动驾驶的技术路线趋于收敛。
车端模型,大公司量产一段式端到端,中游厂商主攻两段式端到端,前沿公司攻克VLA。
云端模型,主攻世界模型,补充corner case场景,亦或用作闭环仿真。
各家也从“讲故事”到“拼实车”,从“懂算法”到“挖细节”。
这大概就是技术栈收敛之后,行业对人才最真实的需求。
人才缺口很大
所以,行业的人才缺口更大了。
以往只是头部公司在做这方面的研究,现在各家主机厂、新势力包括L4领域的公司都在扩招。
对应岗位的关键词:世界模型、VLA、端到端、强化学习、闭环仿真。
对应的技术关键词:3DGS、BEV感知、多模态大模型、Transformer、扩散模型、GRPO、世界模型等等。
目前自动驾驶之心掌握的信息如下:
头部新势力自驾算法岗位维持或收缩,会有一批具身hc的岗位开放,小米、理想、小鹏这几家为代表; 去年发展势头较猛的Tier1还在大批量招人,像卓驭、地平线,据柱哥掌握的信息,端到端/WM等岗位TOP4硕士薪资总包在75左右; 中游的Tier1、主机厂和L4赛道在扩招,大量扩招,最缺的岗位也是端到端、VLA、世界模型,配合云端模型、规控、SLAM、感知的少量岗位。
基于行业真实的人才诉求,自动驾驶之心开发了适配大家需求的精品课程:
《端到端量产小班课》 《端到端与VLA自动驾驶小班课》 《世界模型与自动驾驶小班课》 《自动驾驶VLA与大模型实战课程》 《3DGS理论与算法实战教程》
下面主要是重点聊聊每个技术栈之间的区别和平台针对这些技术领域设计的课程,课程咨询联系:AIDriver005

端到端量产小班课
适合人群:适合校招求职、社招跨行和进一步提升工作技能的社招同学。
核心亮点:大量的工程落地经验分享,强化学习、自回归、Diffusion是比较前沿的端到端落地方向。
老师介绍:王路, C9本科+QS50 PhD,已发表CCF-A和CCF-B论文若干。现任国内TOP tier1算法专家,目前从事大模型、世界模型等前沿算法的预研和量产,所研发算法已成功落地并量产,拥有丰富的端到端算法研发和实战经验。
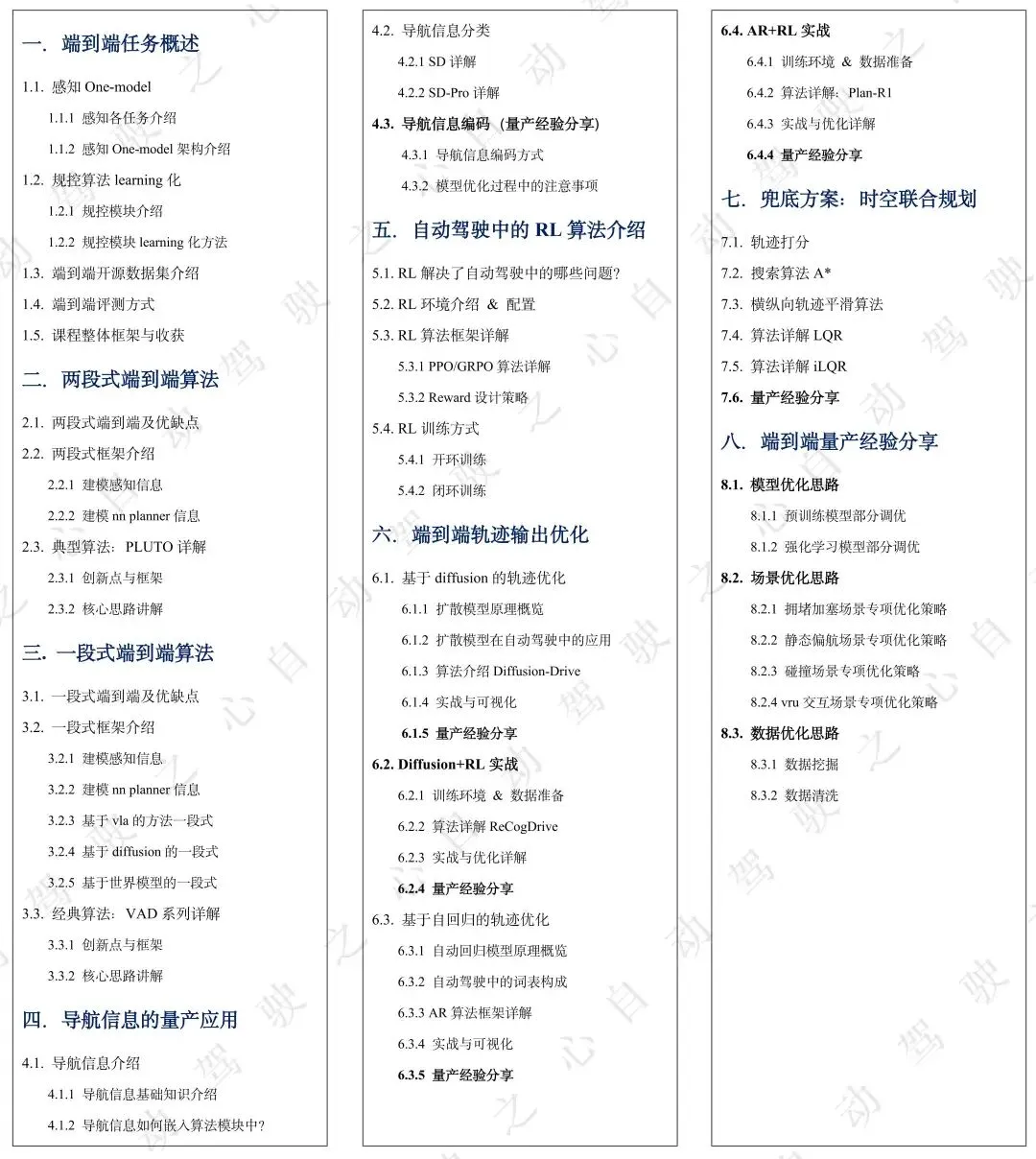
这门课程的设计思路:主要是聚焦在一段式端到端的落地。像SD导航的接入,强化学习的应用(GRPO),以及目前业内主流的基于Diffsuion和基于AR的轨迹输出方法,包括兜底的方案都是比较实际的落地刚需。这门课会分享很多实际的落地方法,讨论可能的解决方案,大家可以看下具体的大纲。
课程大纲
端到端与VLA自动驾驶小班课
适合人群:适合入门学习的学生和已经工作的小伙伴,比较系统的梳理了相关基础的技术栈。
核心亮点:涵盖了端到端与VLA的主流技术栈,两段式端到端,基于感知/世界模型/扩散模型/VLA的一段式端到端,非常适合用来打基础。
老师介绍:Jason, C9本科+QS50 PhD,已发表CCF-A论文2篇,CCF-B论文若干。现任国内TOP主机厂算法专家,目前从事端到端、大模型、世界模型等前沿算法的预研和量产,并已主持和完成多项自动驾驶感知和端到端算法的产品量产交付,拥有丰富的端到端算法研发和实战经验。
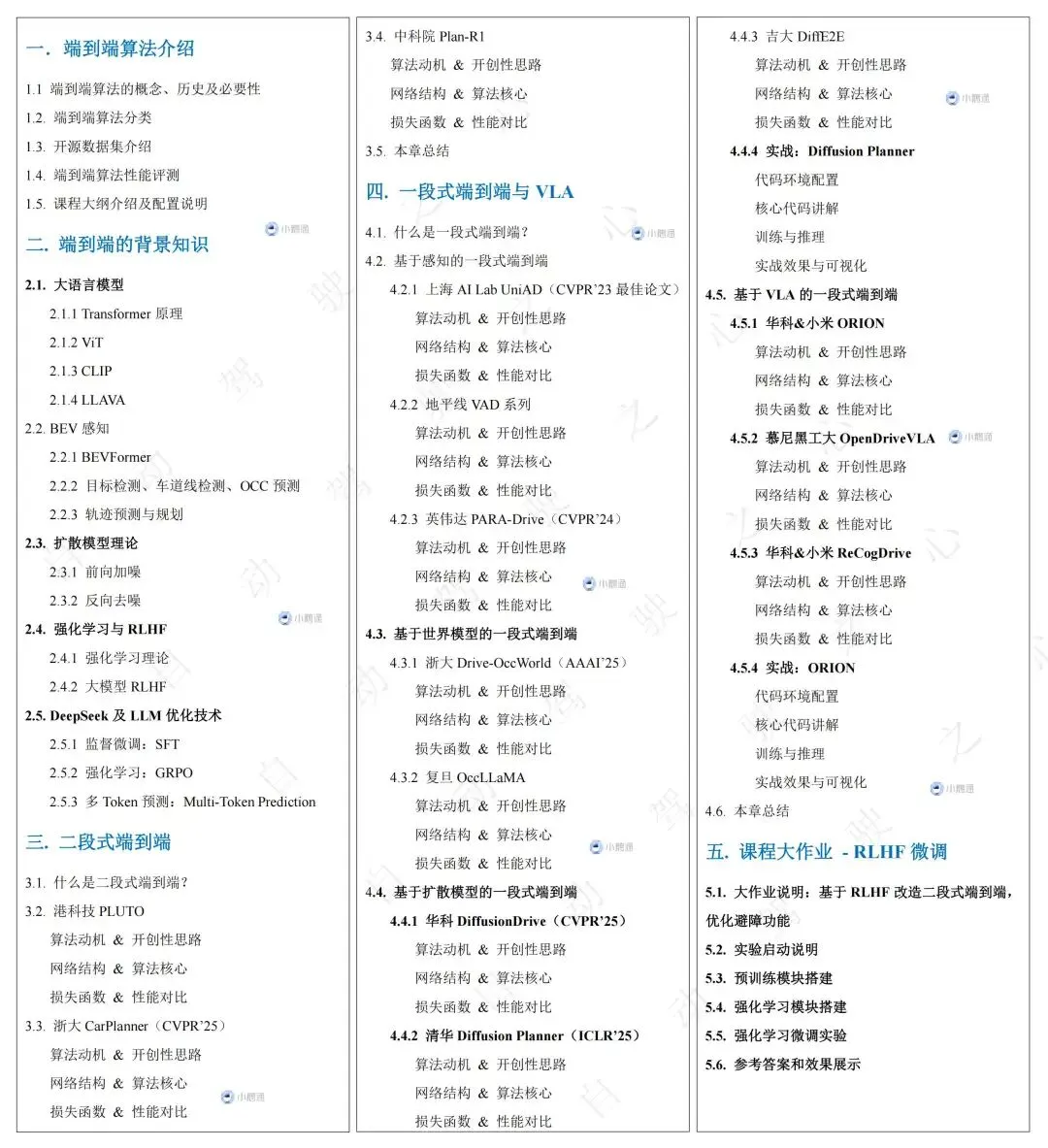
这门课程的设计思路:系统性全面的梳理端到端和VLA技术领域。大纲涵盖的内容可以cover主流面试的所有技术内容,基于感知和基于世界模型的方法目前量产用到的不多,但适合搞研究的人继续突破。扩散模型、VLA和强化学习是重中之重,也是我们课程的重点内容。
课程大纲
世界模型与自动驾驶小班课
适合人群:适合入门学习的学生和已经工作的小伙伴。
推荐原因:世界模型在26年会有一波大的爆发,现在是比较好的时机。
核心亮点:非常详细的基础讲解,以及全面的技术栈梳理,从通用世界模型到视频生成再到OCC生成。
老师介绍:Jason, C9本科+QS50 PhD,已发表CCF-A论文2篇,CCF-B论文若干。现任国内TOP主机厂算法专家,目前从事端到端、大模型、世界模型等前沿算法的预研和量产,并已主持和完成多项自动驾驶感知和端到端算法的产品量产交付,拥有丰富的端到端算法研发和实战经验。
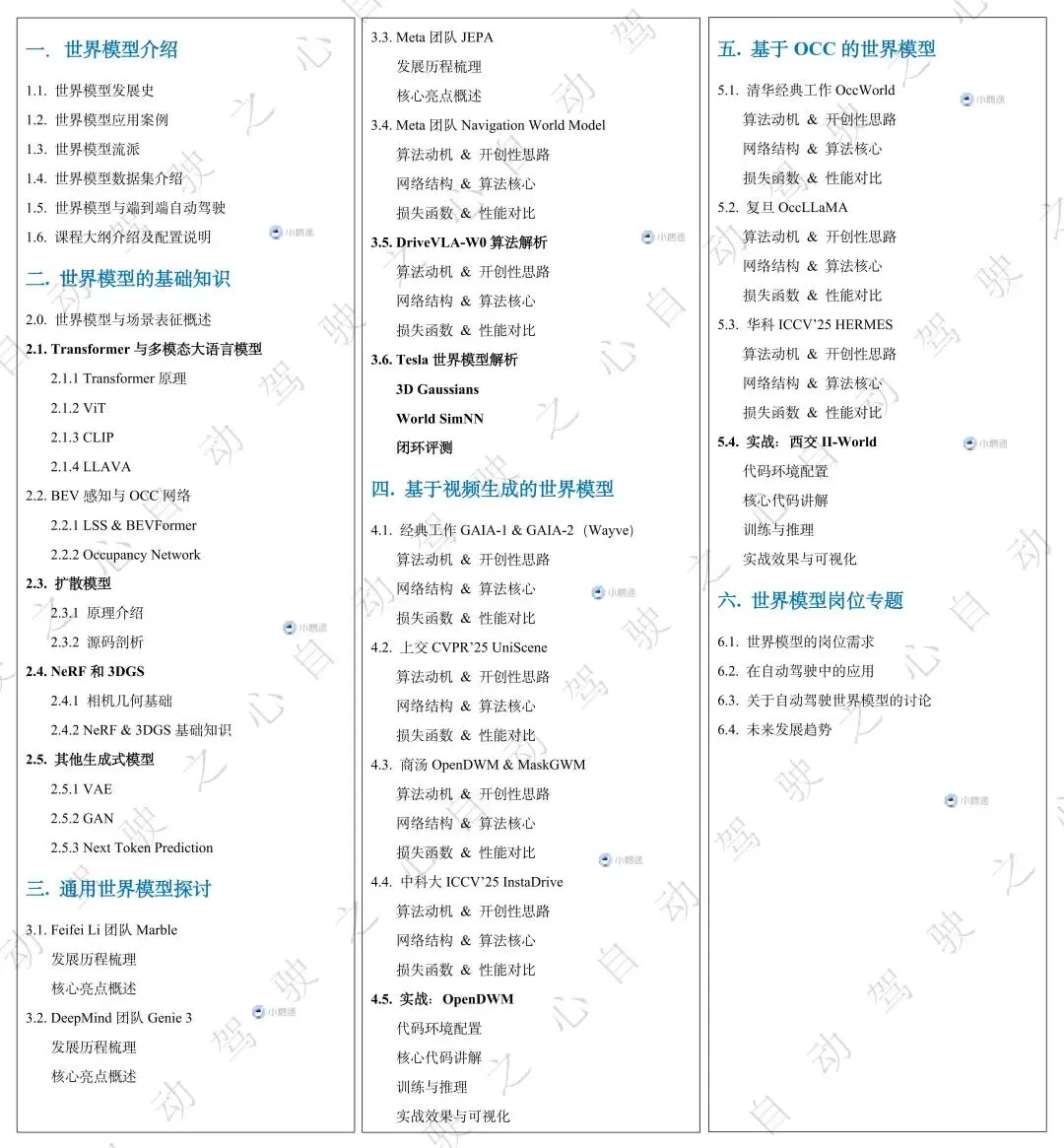
这门课程的设计思路:世界模型似乎一直是个神秘的领域,大家都在提世界模型,但自动驾驶领域的世界模型到底是什么,一直没人能讲得清楚。所以这门课把世界模型的基础,通用世界模型、视频生成和OCC世界模型跟大家聊明白,到底世界模型是什么。
课程大纲
3DGS理论与算法实战教程
适合人群:适合闭环仿真和世界模型方向的同学,尤其是想从SLAM方向转行的小伙伴。
老师介绍:Chris,QS20 硕士,现任某Tier1厂算法专家,目前从事端到端仿真、多模态大模型、世界模型等前沿算法的预研和量产,参与过全球TOP主机厂仿真引擎以及工具链开发,拥有丰富的三维重建战经验。
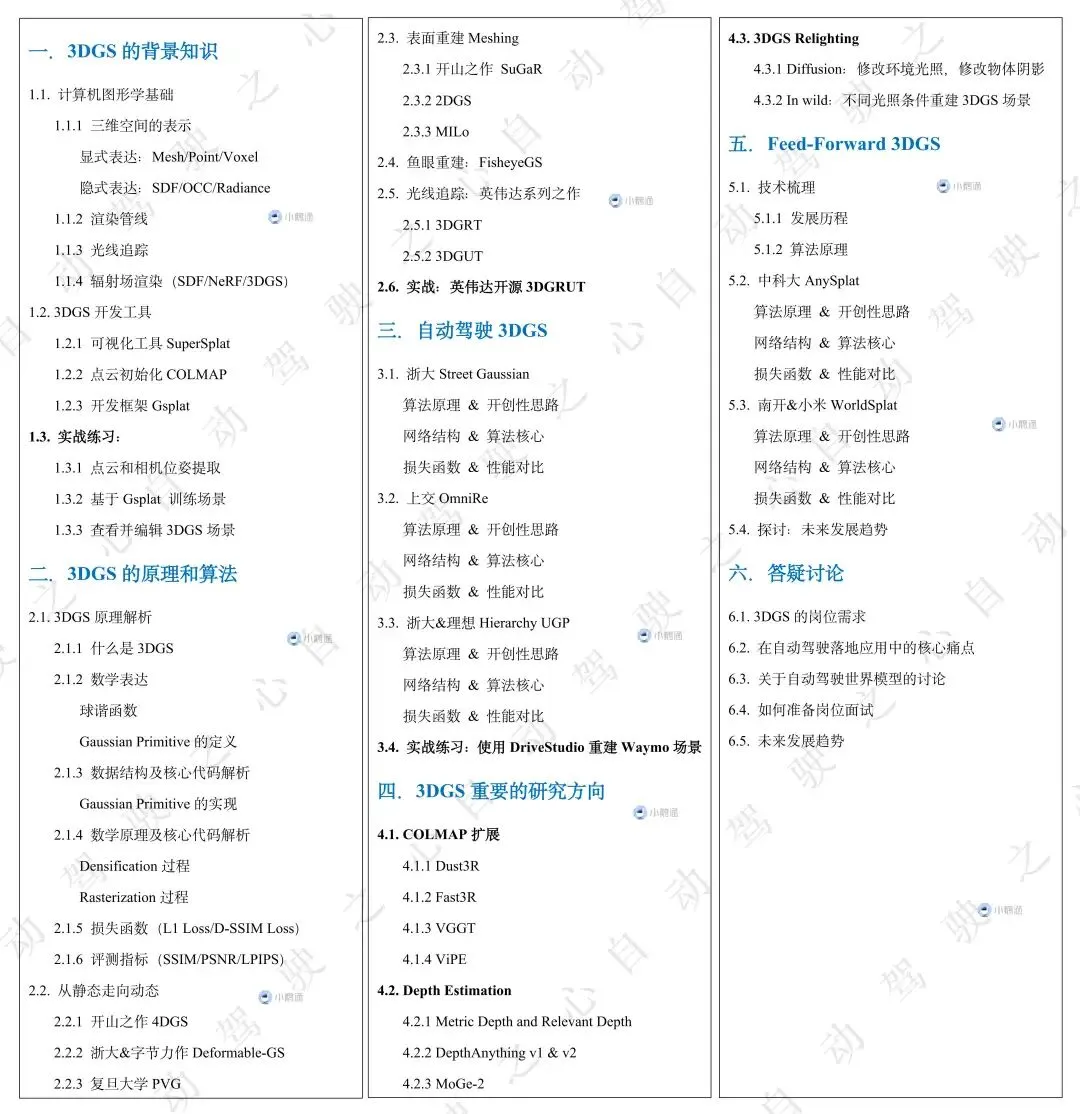
核心亮点:3DGS领域的全栈梳理,静态重建3DGS、动态重建4DGS再到表面重建2DGS,进一步延伸至自动驾驶场景重建,最后着重分享特斯拉ICCV分享的Feed-Forward 3DGS,也是国内头部公司近期在重点攻克的方向。
课程大纲
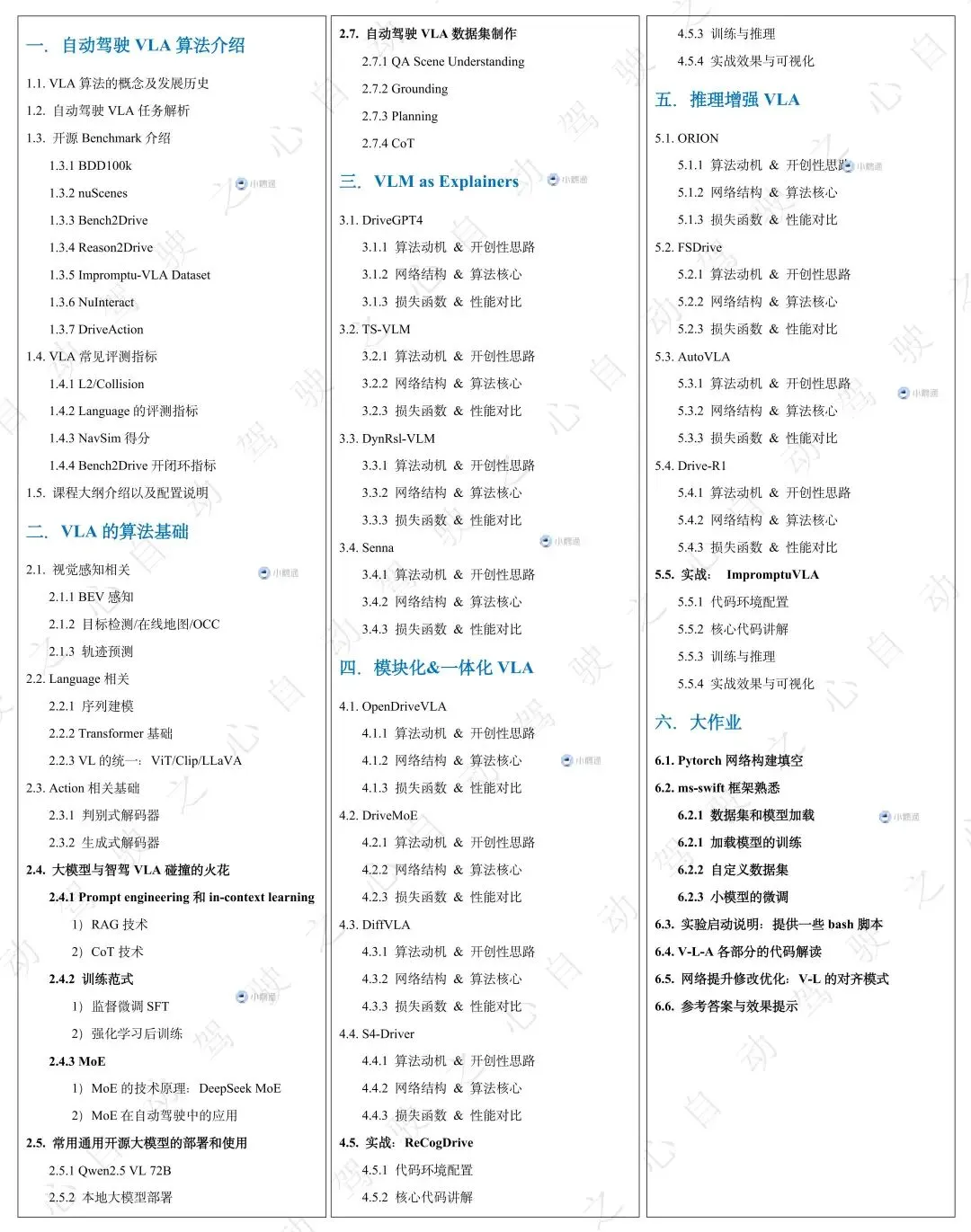
自动驾驶VLA与大模型实战课程
适合人群:适合专攻自驾VLA方向的同学,尤其是大四、研零/研一的小伙伴。
老师介绍:咖喱,清华大学硕士生,在ICCV/IROS/EMNLP/Nature Communications发表论文若干篇。目前从事多模态感知、自动驾驶VLA、大模型Agent等前沿算法的预研,并已主持和完成多项自动驾驶感知和大模型框架工具,拥有丰富的自动驾驶、大模型研发和实战经验。
课程大纲
课程咨询
课程咨询联系:AIDriver005

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 轿车坠入鱼塘,交警5分钟锁定,连救2人!
- 边界口洗车店各种轿车面包车越野电瓶到货了
- 15-20万,买B级新能源轿车,这4款空间大,配置高
- 开年车市大变局!2026 年 1 月轿车销量 & 投诉榜出炉,德系反超登顶
- 2026年春多款SUV蓄势待发,这三款有望月销破万成爆款
- 花 “不到8万” 就能买台大众SUV!?不是二手车,也不是库存车??!
- 十辆顶级全尺寸SUV,哪辆才是你的最爱?我先把话放这:**买“气场”,比买参数更重要**
- 10万出头买合资A级SUV,锋兰达、逍客、途岳该选谁?
- 20万内大空间家用SUV推荐,二胎宝爸亲测体验
- 德系 SUV 仅 8.9W!4624mm 大五座 + 6.2L 油耗 + 92 油,好开还省钱
