扫描下方二维码,添加交流群深入交流
我们训练自动驾驶模型的方式,从根本上就错了。
我们把99%的训练预算烧在“无聊驾驶”上——直线行驶、匀速跟车、无风无浪的巡航。但定义生死的,永远是那剩下的1%:一次突如其来的强行加塞,一个暗夜中横穿马路的身影。
这就是自动驾驶领域的终极悖论:最需要学习的安全关键行为,恰恰是数据中最稀缺的碎片。 在物理世界中收集这些“长尾事件”,无异于用生命去赌博。
但今天要解读的这篇研究,彻底翻了这个棋盘。它不再被动等待危险发生,而是用一套名为 World Engine 的生成式框架,主动“制造”危险,让AI在安全的环境里把生死时刻演练到极致。结果令人震撼:罕见场景成功率最高冲到88.89%,实际路测碰撞率暴跌45.5%。
核心痛点:为什么自动驾驶模型止步不前?
假设你有一个端到端自动驾驶模型,用数百万公里的真实路采数据训练而成。在99%的时间里,它的表现堪称完美,宛如老司机附体。
但问题就在那1%。当你信心满满地进行闭环测试——也就是让模型自己的决策影响后续场景的演变时,灾难发生了:面对一个复杂的交叉路口博弈,或者一次激进的近距离加塞,模型没有选择减速避让,而是径直撞了上去。
这就是现代数据驱动自动驾驶的“长尾魔咒”。论文中的数据极具说服力:简单堆积数据就像往漏水的桶里灌水。增加数倍的平淡驾驶日志,对解决这1%的险情几乎毫无帮助,收益已经急剧递减。
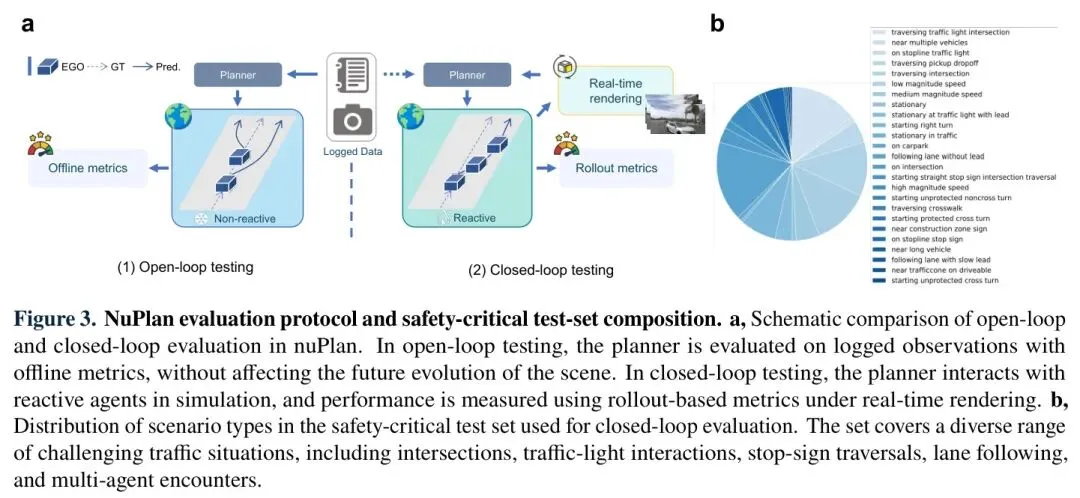 图3:nuPlan基准测试的评估框架,清晰展示了开环(非反应式)与闭环(反应式)评估的核心差异,以及安全关键测试场景的构成比例。
图3:nuPlan基准测试的评估框架,清晰展示了开环(非反应式)与闭环(反应式)评估的核心差异,以及安全关键测试场景的构成比例。上图揭示了行业惯用的“开环评估”与真正的“闭环评估”之间的鸿沟。在开环中,模型只是“看录像回放”来推理;而在闭环中,它是在一个活生生的世界里和其他交通参与者“即时博弈”,错误会像雪球一样越滚越大。而真正的挑战,正如图(b)所示,分散在路口穿行、无保护转弯等多样且罕见的交互中。
因此,核心问题变成了:如何低成本、高密度地获得这1%长尾场景上的高质量训练信号?
World Engine 如何“无中生有”制造危险
World Engine 不再被动地等待事故视频,而是主动出击,构建了一个从发现、生成到优化的完整后训练体系。
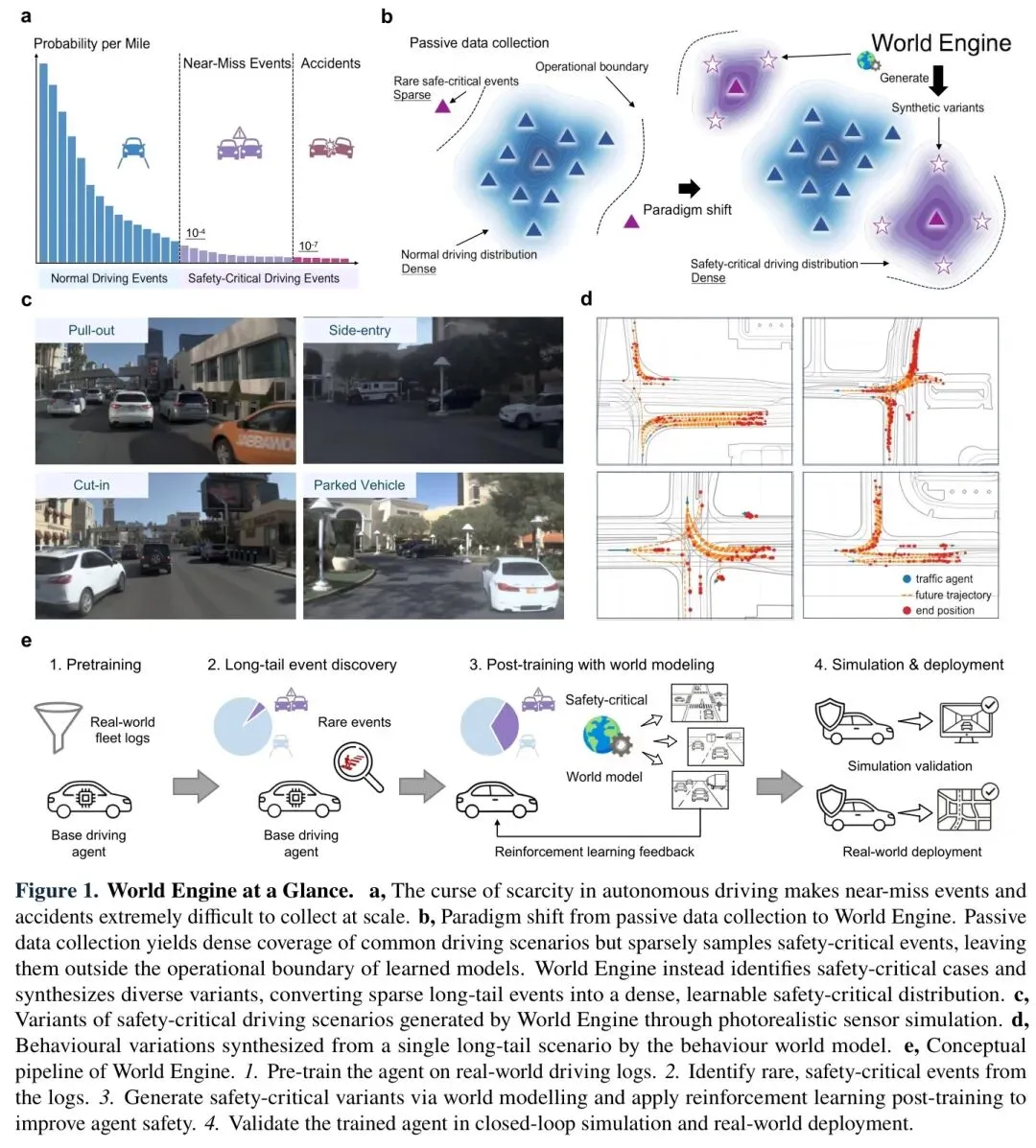 图1:World Engine的整体架构图,展示了从发现长尾场景、生成合成变体、世界模型后训练到最终仿真验证的完整范式转变。
图1:World Engine的整体架构图,展示了从发现长尾场景、生成合成变体、世界模型后训练到最终仿真验证的完整范式转变。💡 第一阶段:预训练与长尾挖掘
首先,你需要一个坚实的基础模型。这个模型通过监督学习在海量驾驶日志上进行预训练,习得了处理90%常规场景的能力。可以把它理解为刚拿到驾照的实习司机,能开车,但面对突发状况手忙脚乱。
World Engine 的做法很巧妙:它先用这个尚不完美的模型在历史数据中“找茬”。通过分析PDM Score(预测、决策、运动综合评分)等指标,系统自动筛选出那些即使对于人类专家也极具挑战、且基础模型容易失败的重交互片段。这些,就是后续训练最宝贵的“原材料”。
💡 第二阶段:环境重建与外推
找到这些珍贵的长尾片段后,World Engine 开始施展“魔法”。
它利用3DGS(3D高斯泼溅)等先进的神经渲染技术,将这些路采日志高保真地重建为可交互的4D数字孪生环境。这不再是简单的视频回放,而是一个你可以改变轨迹、插入其他车辆、改变其行为模式的逼真世界。论文强调,这个重建过程是反应式的:你改变自车的轨迹,整个世界都会做出物理真实的反应。
💡 第三阶段:长尾世界的密集外推
这是World Engine 最核心的创新。仅仅重放已经发生过的事件是不够的。系统会大幅外推这些场景:它会引入更多具有攻击性、罕见行为的交通参与者。
试想一下,从一段被加塞的真实记录出发,World Engine 可以自动合成出数千个变体:有的车以不同速度、不同角度加塞而来;有的在弯道遮挡视野后突然变道;有的在夜间低光照下突然穿行。正是这种行为世界模型的驱动,让那“1%”的数据瞬间变得稠密起来,为模型提供了充分的高难度训练素材。
💡 第四阶段:强化后训练与部署
现在,我们有了一个充满危机四伏的虚拟训练场。接下来该模型上场了。
在这一阶段,预训练好的模型被置于这些合成的长尾世界中,进行强化学习后训练。奖励信号直接与安全性和驾驶质量挂钩——比如是否碰撞、是否偏离车道、是否平滑制动等。由于这一切都在仿真中完成,模型可以无物理风险地反复试错、调整策略,直到它学会在不计其数的“加塞地狱”或“鬼探头之夜”中全身而退。这不仅规避了真实世界探索的风险,而且从论文的数据来看,这种定向的后训练带来的安全收益,比盲目扩大10倍预训练数据还要高。
实验验证:数据是最好的证明
一套方法论的优劣,最终要用数据说话。World Engine 提交了一份令人印象深刻的答卷。
🏆 基准测试:立竿见影的性能提升
在nuPlan的安全关键性闭环基准测试中,World Engine 展现了压倒性的优势。
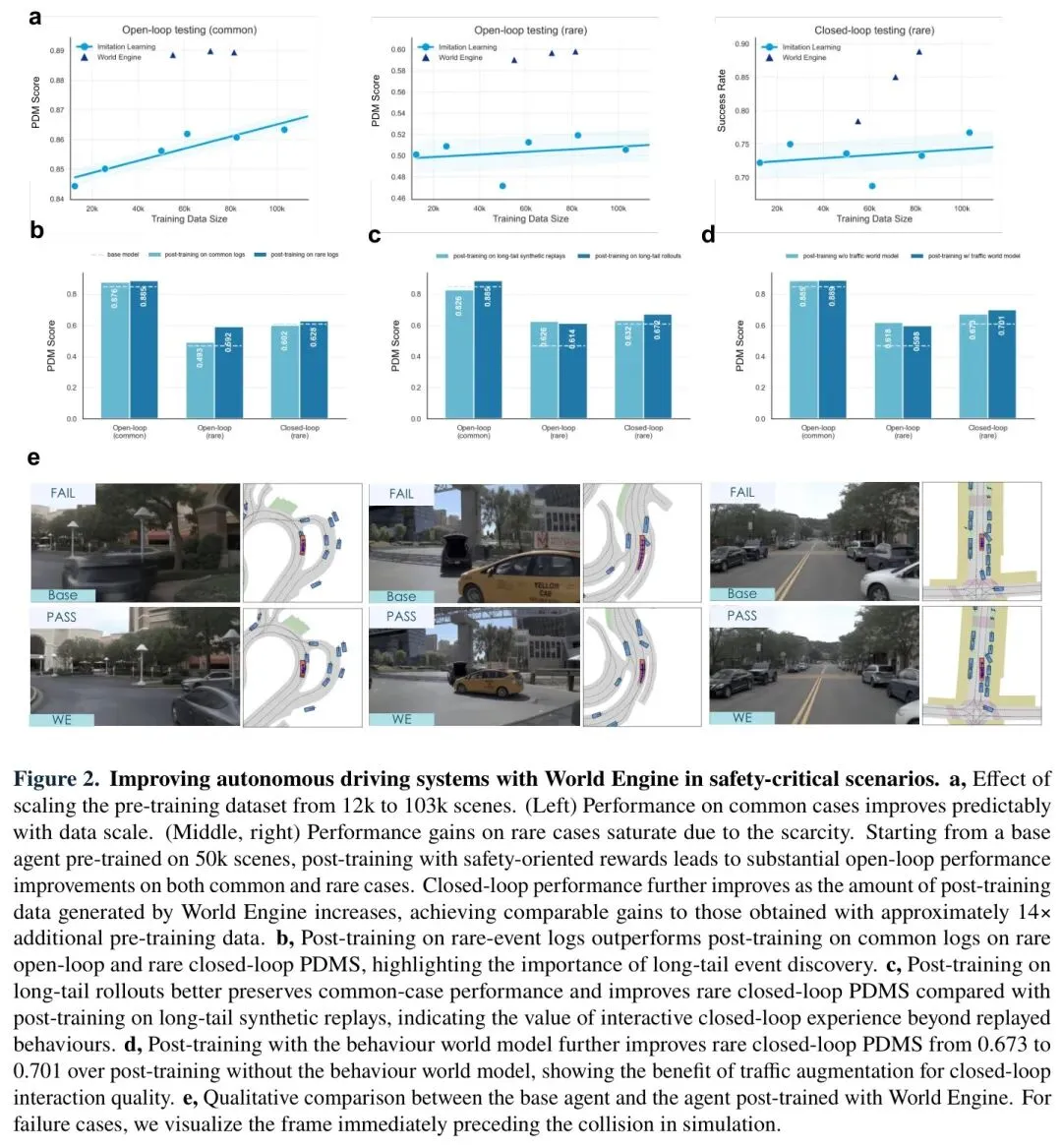 图2:World Engine在安全关键场景下的性能验证,显示其开环与闭环性能远超基础模型,且后训练增益优于单纯扩充数据。
图2:World Engine在安全关键场景下的性能验证,显示其开环与闭环性能远超基础模型,且后训练增益优于单纯扩充数据。左图(a)的趋势线揭示了一个关键洞察:当预训练数据从12,000个片段增加到103,000个时,传统模仿学习在罕见闭环场景下的PDM Score增长缓慢,很快就触及了天花板。而红色的World Engine曲线则一飞冲天。这意味着,用后训练解决长尾问题,是一条比单纯堆数据高效得多的路径。
右图(b)和(c)的定性对比更为直观。在三个具体的危险场景中(如无保护左转、复杂路口博弈),基础模型的BEV轨迹图(蓝色框)清楚显示其笔直撞向障碍物,而经过World Engine训练的模型(红色框)则规划出了一条平滑、安全的绕行路径。
🔬 消融实验:每个组件都不可或缺
为了证明框架中每个模块的价值,论文进行了严格的消融实验。
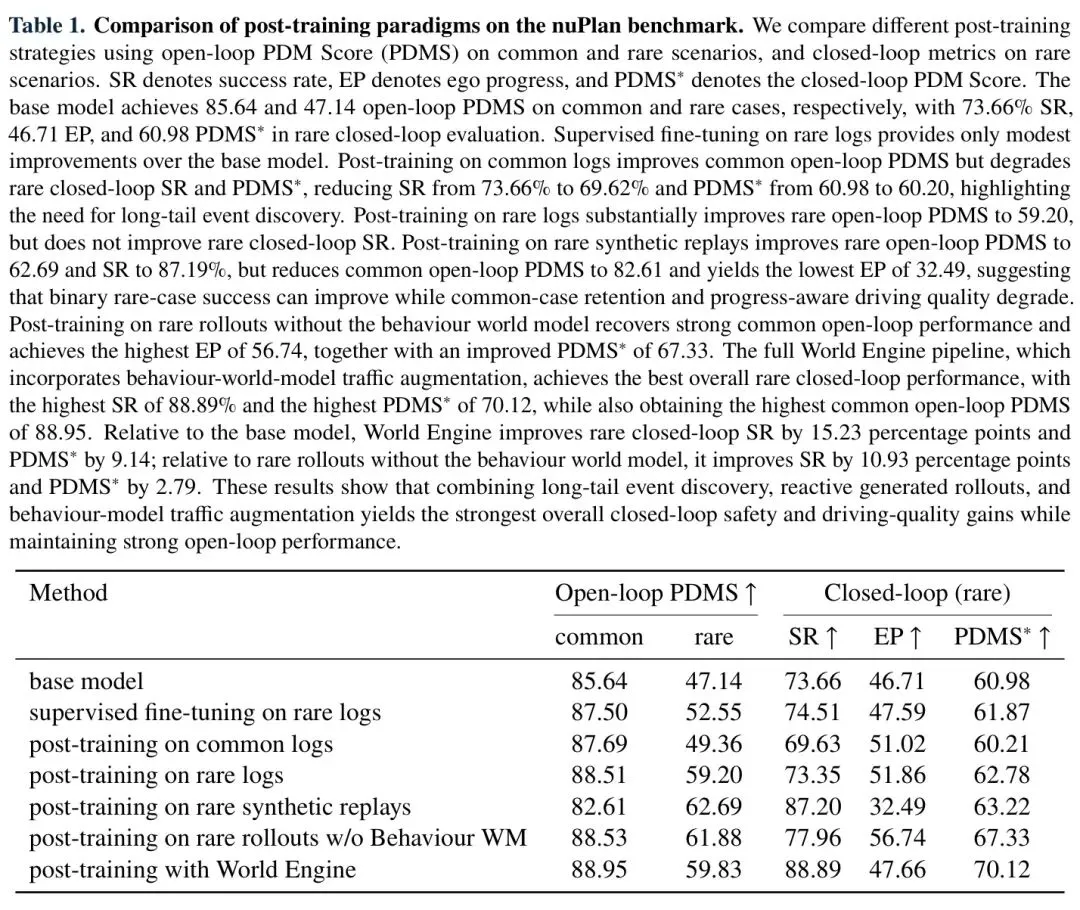 表1:World Engine在nuPlan基准上的消融实验对比,完整流程在闭环安全性与驾驶质量上全面领先。
表1:World Engine在nuPlan基准上的消融实验对比,完整流程在闭环安全性与驾驶质量上全面领先。- • Baseline:基础模型在罕见闭环场景下的成功率(SR)有限,综合驾驶质量得分(PDMS*)也较低。
- • +稀有数据微调:如果用那1%的稀有真实日志进行后训练,性能有小幅提升,但杯水车薪。
- • +长尾轨迹展开:当引入由行为世界模型合成的多样、反应式训练数据后,罕见的闭环PDMS从基础模型的较低水平跃升至*67.33。
- • 完整World Engine:在此基础上,加入行为世界模型以增强交通交互的真实性和多样性后,成功率飙升至88.89%,PDMS达到最优的*70.12,同时,常见场景的开环性能不仅没有下降,反而高达88.95。
这组数据完美验证了论文的核心论点:反应式的闭环合成数据+逼真的交通流增强,是解开长尾难题的那把钥匙。
🚀 大规模工业验证:从虚拟走向现实
当这套框架被部署到拥有百万级量产车的真实系统中时,其效果更令人激动。
在工业级大规模硬件在环仿真中,World Engine 后训练的模型在超过10000个安全关键场景中,将危险的加塞碰撞(cut-in)风险直接降低了45.5%!与行人和骑行者的碰撞也减少了15%以上。
论文中展示的决定性瞬间令人印象深刻:在高速路加塞场景下,基础模型在T0时刻错失减速窗口,T1时刻已经与插入车辆发生碰撞;而后训练模型则在T0时刻就预见风险,提前平稳刹车,为对方留出空间,整个过程行云流水。
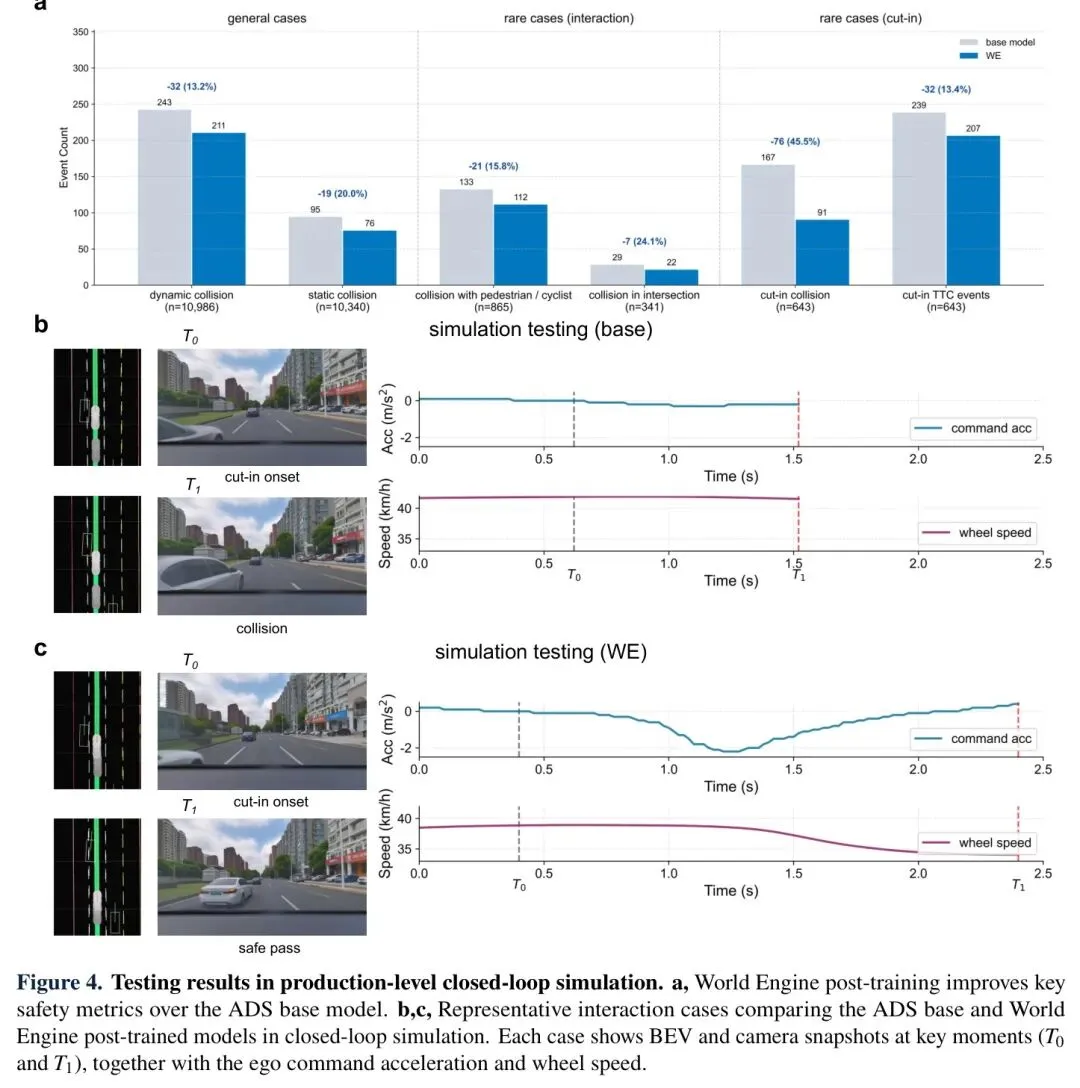 图4
图4图:生产级ADAS系统闭环仿真对比,World Engine后训练模型在罕见加塞场景下实现主动避让,而基础模型发生碰撞。
更令人振奋的是真实道路测试。在一个长达200公里、穿越上海高速和繁华市区的零接管挑战中,World Engine模型的通勤从未被打断。反观基础模型,尽管只触发了一次安全员干预,但那次干预正是一次典型的、极为惊险的加塞场景——对方车辆在完全没有注意到测试车的情况下强行并入,基础模型甚至错误地选择了加速,迫使对方紧急中止让道。
而World Engine模型在同一场景下,提早识别出风险,通过一个果断而平滑的减速动作,悄无声息地化解了危机。
如果你觉得白天的成功还不够有说服力,那么看看夜间驾驶测试。在多个低光照、高风险的被遮挡路口和行人突然穿行场景中,World Engine的模型依然稳定地规划出安全轨迹,而控制车辆的速度和加速度曲线(图6)也显示出其决策的果断与老练。
客观评价:瑕不掩瑜,未来可期
尽管World Engine带来了范式级的变革,但它并非完美无缺。论文作者也坦率指出了其局限性:
- 1. 场景发现边界:目前的“找茬”机制只能识别日志中已经存在的失败模式。如果一种全新的、从未被记录过的危险场景类型出现,系统将无法启动。这需要未来在场景生成的“发散性”上做更多探索,比如结合程序化生成或数据驱动的对抗搜索。
- 2. 渲染保真度约束:基于3DGS的仿真引擎在偏离原始采集轨迹太远时,图像质量会下降,产生的视觉伪影可能会误导策略学习。这是当前视觉生成式AI在仿真应用中一个普遍的、有待突破的瓶颈。
尽管如此,World Engine 已经为我们指明了清晰的方向。对于整个行业而言,它的价值不只在于一套算法,更在于提供了一种全新的研发范式:从策略上轻视数据量,从战术上重视数据质。
价值升华:自动驾驶走进“后训练时代”
如果要用一句话总结这篇工作的划时代意义,那就是:
它让自动驾驶的核心挑战,从“如何找到长尾数据”变成了“如何高效生成长尾数据并用于安全对齐”。
这背后是一场从数据工程到智能工程的战略转移。过去,我们的口号是“数据是燃料”;但World Engine告诉我们,在长尾区域,“合成好数据”才是核聚变。它让我们相信,一个即使没有亲身经历过所有危险,也能在无数次“思想实验”和“模拟演习”中变得绝对可靠的驾驶AI,正在成为现实。
🤔 深度思考:你认为“合成数据后训练”这条技术路线,最有潜力颠覆自动驾驶以外的哪一个物理AI领域?是通用机器人、无人机配送,还是其他?欢迎在评论区留下你的深度思考!
💝 支持原创:如果你觉得这篇解读让你对自动驾驶的未来有了新的期待,请毫不犹豫地点赞、在看,并把它分享给每一个关心AI落地的朋友。你的支持,是我们持续深挖硬核技术的最大动力!
🔔 关注提醒:想第一时间读懂改变世界的技术?点击关注,设为星标,干货不再错过。
#AI技术 #深度学习 #自动驾驶 #长尾问题 #合成数据 #论文解读
参考
World Engine: Towards the Era of Post-Training for Autonomous Driving

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
