自动驾驶是咋避开车辆和行人的?老司机老王的深度解析
说实话,这些年我也算是见过不少新鲜玩意儿,尤其是新能源、自动驾驶这块,跑了大大小小的车展,试驾超100台车,累计50万公里。作为一个开了14年车的老油条,还是得站在咱们普通车主的视角,给大伙掰扯掰扯,特别是带着老婆孩子出门,安全和实用性才是真理。
这期我就来说说,自动驾驶到底是咋“看清”路上的人和车,又怎么“躲避”它们的。说难听点,不少人以为自动驾驶就是给车装几块摄像头,机器自己开起来。但这门技术可没那么简单,真的是没谁了,值得咱们琢磨琢磨。
01.
自动驾驶的“眼睛”:摄像头和AI怎么识别行人车辆?
最开始,工程师们的想法很直接——给车装上“眼睛”摄像头。老实说,这和咱人眼看东西有点类似。但有点麻烦的是,咱人眼看到模糊能自动脑补,可AI眼里的世界就是一堆像素点,它根本分不清哪个是车哪个是人。这就得靠大量“补习”——用数百万张标注好的图片来教AI识车。
你可能会想,这不挺简单嘛。结果没想到,认得出来还不够,车辆开起来还得知道对方距离远近,不然刹车踩早了迟了都要出问题。
这时候,救兵来了——激光雷达。
 汽车底盘、电池包及电机结构透视图
汽车底盘、电池包及电机结构透视图
02.
激光雷达:超级精准的测距“瞎子”
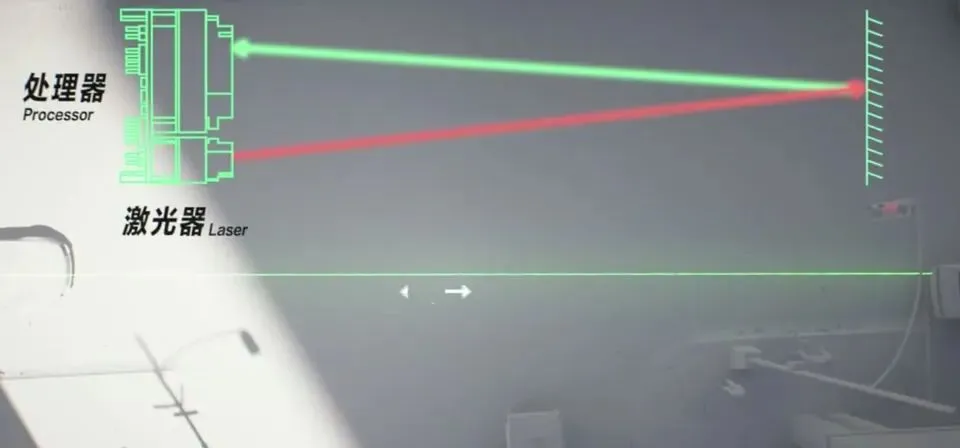
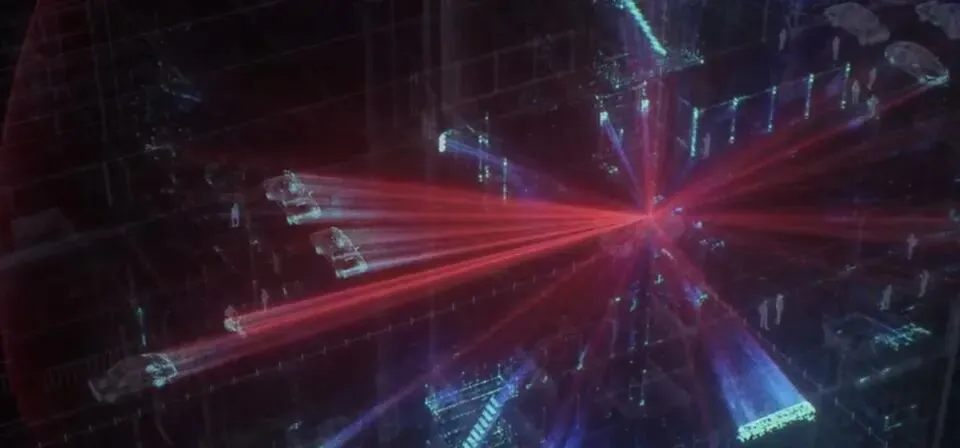
激光雷达不会像摄像头像素那样“看东西”,它靠发射激光束测量反射回来时间,能精准到毫米级别描绘周围环境的3D点云图。
想象一下,它就像个“瞎子”但能摸清前方每一个物体的具体距离,生成一张城市街道的点云地图。可是,它只知道“这里有东西”,却不知道“这东西是什么”。
那怎么办?自然是把摄像头和激光雷达结合起来——“一个看清是啥,一个测量多远”。
03.
传感器融合的“吵架”:雷达和摄像头谁说了算?
话说回来,这俩“设备”经常“吵架”——雷达说前面有障碍,摄像头说那是影子。那系统该听谁的?出现判断错误时,就会导致让人烦躁的“幽灵刹车”。
这就有点过分了,毕竟咱们是带着老婆和娃出门,稳定可靠是第一位的。
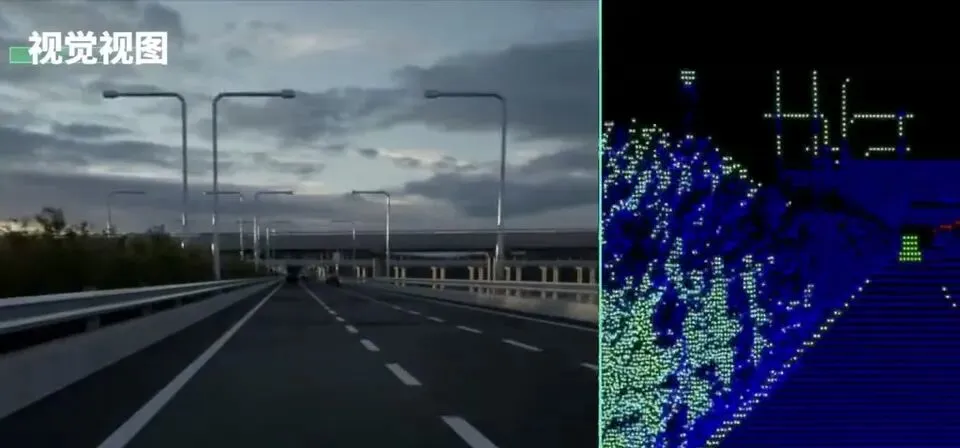 视觉图像与点云数据的融合分析
视觉图像与点云数据的融合分析
更麻烦的是,早期自动驾驶系统还得依赖高精地图“保姆”,可一旦离开地图支持,比如在复杂城镇,系统就很容易卡壳。
04.
革命性突破——端到端大模型与鸟瞰式“上帝视角”
传统的自动驾驶控制靠的是一条条“如果…那么…”的硬规则编写。说句良心话,这种方法就像死背题库,一遇到复杂情况就容易“死机”,不能灵活应变。
这里有个潮流趋势叫做“transformer”模型,干嘛用的?简单来说,它让AI凭借鸟瞰图的上帝视角,能瞬间把周围环境“看明白”,不再纠结到底哪个是人哪个是车,只判断空间网格里有没有“障碍物”。


05.
端到端自动驾驶,靠海量数据培养“老司机”直觉
现在最牛逼的是端到端的大模型,它不靠规则,直接喂给AI海量的人类开车视频,然后靠自己总结规律,从传感器信号直接输出驾驶动作。
咱们说句大白话,就像一名疯狂刷题的老司机,练出了灵活且直觉的驾驶能力。
 端到端模型对复杂城市路口的感知模拟
端到端模型对复杂城市路口的感知模拟
业界现在分两派:
-
- 纯视觉派,靠摄像头和算法“脑补”世界,成本低,但下雨大雪时容易“失明”
-
- 多传感器融合派,激光雷达等多设备加持,安全感满满,可成本也高不少
-
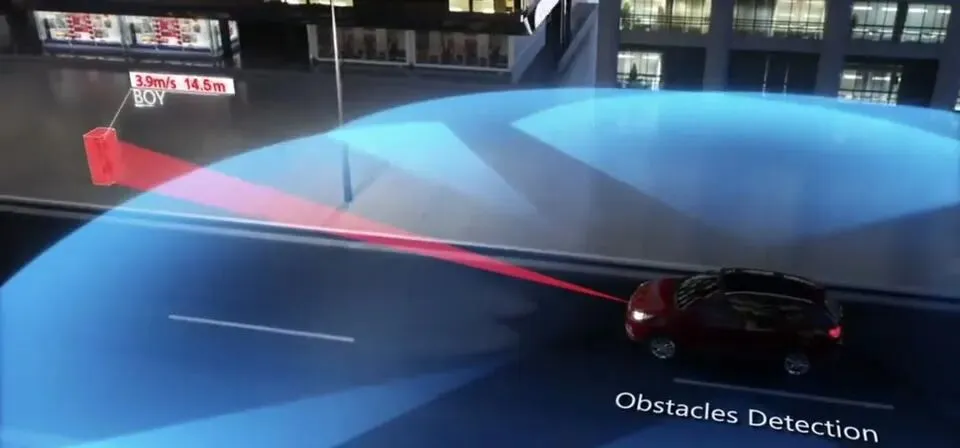 融合感知方案在低光照环境下的目标探测
融合感知方案在低光照环境下的目标探测
说句良心话,这点我是服气的:
自动驾驶的发展真不是一天两天的事,既要技术更迭,也得考虑咱们用户的用车场景。特别是奶爸带娃,安全无小事。
自动驾驶能帮咱解放双手、减轻负担,但“别被营销忽悠了”,实用性和安全性才是我关心的重点。
简单来说,这事情咱得理性看,别盲目跟风买贵的或者忽视了实际体验。大家都知道,我说话从来不收钱,就是实话实说。
各位车友,你们更看好纯视觉的“脑补派”,还是多传感器的“安全派”呢?欢迎留言聊聊你们的看法。
 特斯拉在公路上行驶,展示自动驾驶视角
特斯拉在公路上行驶,展示自动驾驶视角
这波自动驾驶科普,咱们下回再讲技术细节里发动机之外的那些三电系统和底盘调校。大家觉得呢?欢迎留言讨论!

