在自动驾驶技术向L4级及以上高阶演进的赛道上,算法迭代与工程落地之间始终横亘着一道现实鸿沟——真实道路测试的效率瓶颈、安全风险与场景覆盖局限,成为制约无人车从实验室走向大众生活的核心障碍。当传统测试手段难以突破“百万公里级数据积累”与“极端场景验证”的双重困境时,自动驾驶仿真测试凭借“虚拟试车场”的独特优势,成为行业共识的破局路径。而人工智能(AI)技术的深度渗透,更让这一虚拟空间实现了从“被动模拟”到“主动生成”、从“静态复刻”到“动态演进”的质变,成为加速无人车商业化落地的关键引擎。东嘉智汇的小编将从技术内核、实践价值、行业案例到未来演进,系统拆解AI与自动驾驶仿真的融合逻辑,剖析其如何重塑无人车研发与测试体系。
一、行业困境:真实道路测试的不可逾越之障
高阶自动驾驶的核心诉求,是实现复杂环境下的安全决策与稳定控制,这需要算法在海量差异化场景中完成学习与验证。然而,依赖真实道路测试的传统模式,早已陷入“三难困局”,难以支撑技术快速迭代。
1.1 成本之困:天价投入难以规模化
一辆搭载高阶自动驾驶系统的测试车辆,其硬件成本就足以让多数企业望而却步。激光雷达作为核心感知设备,单台成本可达数十万元甚至上百万元,搭配高清摄像头、毫米波雷达、惯性测量单元(IMU)等多传感器融合方案,单车硬件投入普遍超过300万元。除硬件购置外,测试过程中的运维成本同样高昂——每公里测试需配备专业安全员、数据标注人员、技术保障团队,综合测算每公里测试成本超100元,若要积累1亿公里真实测试数据,仅测试费用就需超千万元。对于中小企业而言,这样的投入完全超出承载能力,即便头部企业,也难以通过无限扩大真实测试规模实现算法快速优化。
1.2 安全之险:未成熟算法的潜在隐患
自动驾驶算法的迭代过程,本质上是“试错-优化-迭代”的循环,而未成熟算法在真实道路上的试错,往往伴随着巨大的安全风险。无论是感知算法误判障碍物、决策系统出现逻辑漏洞,还是控制算法响应延迟,都可能引发碰撞事故,威胁行人与测试人员安全。2018年特斯拉自动驾驶模式下的致命碰撞事故、2021年小马智行测试车与电动车的剐蹭事故,都印证了真实道路测试的安全隐患。随着各国对自动驾驶测试的监管趋严,未成熟算法的道路测试空间被进一步压缩,倒逼行业寻找更安全的测试路径。
1.3 场景之限:长尾场景的不可覆盖性
真实世界的交通环境具有极强的复杂性与随机性,大量“长尾场景”——即发生概率极低、却可能引发严重事故的场景,如暴雨天路面湿滑时突然窜出的流浪动物、高速路上货车轮胎脱落导致的突发障碍、极端低温下传感器结冰失效等——难以通过真实测试覆盖。相关数据显示,长尾场景仅占所有交通场景的5%,却引发了超过60%的自动驾驶事故。Waymo的测试数据更具说服力:其真实道路测试里程累计超2000万公里,而仿真测试里程已突破100亿公里,相当于绕地球25万圈,仿真测试的场景覆盖能力与效率,是真实测试的500倍以上。显然,仅靠真实道路测试,永远无法穷尽所有可能场景,更难以应对极端情况的挑战。
二、核心赋能:AI重构自动驾驶仿真测试体系
自动驾驶仿真测试的本质,是通过数字建模构建与真实世界一致的虚拟环境,让无人车在虚拟空间中完成算法训练与验证。而AI技术的加入,彻底改变了仿真测试的底层逻辑,从场景生成、环境建模到智能体模拟,实现了全流程的智能化升级,解决了传统仿真“场景单一、真实性不足、效率低下”的痛点。
2.1 场景生成:AI打造“无限随机副本”
场景是仿真测试的基础,传统仿真场景依赖人工绘制与参数设置,不仅效率低下,且难以生成复杂多变的动态场景。AI技术通过生成式模型与强化学习,实现了场景的自动化、多样化与动态化生成,为算法提供了“无限量”的训练素材。
生成对抗网络(GAN)是场景生成的核心技术之一。通过生成器与判别器的对抗博弈,GAN能够学习真实道路场景的特征分布,生成照片级逼真的虚拟场景,包括道路纹理、交通标志、天气效果、周边建筑等细节。例如,基于真实城市道路图像训练的GAN模型,可自动生成不同城市(如北京中关村、上海陆家嘴)、不同时段(早高峰、深夜)、不同天气(暴雨、雾天、大雪)的道路场景,且能精准还原路面裂缝、路灯影子、积水反光等细节,让虚拟场景与真实环境高度契合。前文提及的PyTorch实现案例,正是通过GAN生成64x64的道路场景图,为感知算法提供了海量标注数据。
强化学习(RL)则解决了动态场景生成的难题。传统场景多为静态或半静态,无法模拟交通参与者的交互行为,而RL可通过设置奖励机制,让虚拟场景根据无人车的动作动态调整。例如,在基于RL构建的动态驾驶环境中,前车会根据无人车的加速、减速行为,做出突然刹车、变道等反应;行人会随机做出闯红灯、驻足观望、绕开障碍物等动作,形成与真实世界一致的动态交互场景。这种“自适应”场景,能更精准地测试算法的应急响应能力,让无人车在虚拟环境中应对各种突发情况。
此外,大语言模型(LLM)的融入,进一步降低了场景生成的门槛。开发者只需用自然语言描述场景需求,如“在暴雨天的山区公路上,一辆失控的摩托车从对向车道窜出,同时路边有行人横穿马路”,LLM即可自动解析需求,生成对应的虚拟场景参数,驱动仿真平台构建复杂场景,大幅提升场景设计效率。
2.2 环境建模:AI复刻“真实物理规则”
环境模型是仿真测试的“地基”,需精准模拟真实世界的物理规律与传感器特性,否则会导致仿真结果与真实情况脱节,形成“仿真鸿沟”。AI技术通过学习真实物理数据与传感器特性,让环境建模更逼真、更高效。
在传感器模拟方面,传统方法依赖手动设置参数,无法还原真实传感器的噪声与误差,而AI可通过学习真实传感器数据,生成带噪声的虚拟传感器数据。例如,变分自编码器(VAE)可学习真实摄像头在雨天、雾天的图像特征,生成模糊、有光斑的虚拟图像;PointNet则能模仿激光雷达点云的分布规律,生成包含遮挡、缺失、噪声的点云数据,让感知算法在虚拟环境中就能适应真实传感器的特性。这种“带噪声”的模拟数据,能有效提升算法的鲁棒性,减少仿真与真实环境的差异。
在物理模拟方面,AI技术大幅提升了计算效率与模拟精度。传统物理模拟需求解复杂的微分方程,计算速度慢,难以支撑大规模实时仿真。而图神经网络(GNN)、神经网络代理模型等AI技术,可替代传统物理模型,快速预测车辆运动、碰撞效果、交通流变化等物理现象。例如,GNN将每辆车辆作为节点,车辆间的距离、速度关系作为边,通过训练可快速预测多车辆交互下的运动轨迹,计算效率比传统元胞自动机模型快10倍以上,能支撑数百辆车辆的实时仿真。
2.3 智能体模拟:AI赋予“虚拟参与者灵魂”
交通参与者(行人、车辆、自行车等)的行为真实性,直接决定了仿真测试的有效性。若虚拟参与者行为僵化、不符合真实逻辑,仿真测试结果将失去参考价值。AI技术通过学习真实行为数据,让虚拟智能体具备符合人类习惯与逻辑的行为模式,成为“有灵魂的群演”。
在行人行为模拟中,传统有限状态机(FSM)只能实现简单的行走、停下等固定动作,而AI可通过长短期记忆网络(LSTM)、GAN等模型,学习真实行人的轨迹与行为习惯,生成复杂多变的行人行为。例如,LSTM可通过分析监控视频中的行人轨迹数据,预测行人的下一步位置,模拟出行人犹豫过马路、边走边看手机、绕开积水等真实行为;GAN则能生成行人的异常行为,如突然奔跑、翻越护栏等,为算法提供极端行为测试场景。
在车辆行为模拟中,AI可还原不同司机的驾驶风格,让虚拟车辆具备个性化行为。通过强化学习中的近端策略优化(PPO)算法,可训练出激进型、保守型、稳健型等不同风格的虚拟司机——激进型司机会频繁变道、加速超车,保守型司机会保持安全距离、减速避让,稳健型司机则能根据路况灵活调整驾驶策略。这种多样化的驾驶风格模拟,能让无人车在虚拟环境中适应不同真实司机的行为模式,提升算法的通用性。
三、实践落地:AI仿真加速无人车商业化进程
AI赋能的自动驾驶仿真测试,已不再是实验室中的技术探索,而是成为头部企业与开源平台的核心研发工具,在降低成本、提升效率、保障安全等方面发挥着关键作用,推动无人车加速走向商业化。
3.1 标杆案例:头部企业的仿真实践
Waymo作为自动驾驶领域的领军者,构建了全球最庞大的AI仿真测试体系——Waymo Simulation。该系统通过AI生成海量常规场景、极端场景与长尾场景,实现了算法的快速迭代与验证。Waymo的数据显示,其仿真测试中每发现1个关键问题,就能减少真实道路测试中约3次潜在事故;通过仿真测试优化后的算法,真实道路事故率降低了30%以上。此外,Waymo还利用数字孪生技术,将真实道路的交通状态实时同步到虚拟环境中,让虚拟测试与真实路况联动,进一步缩小仿真鸿沟。
国内方面,百度Apollo开源仿真平台成为行业标杆。Apollo Simulation集成了GAN、RL等AI技术,提供一站式场景生成、传感器模拟、智能体训练工具。开发者可通过平台快速搭建仿真环境,测试感知、决策、控制算法。某自动驾驶创业公司借助Apollo Simulation测试行人检测算法,仅用1周时间就覆盖了1000种不同行人场景,包括不同姿态、不同天气、不同遮挡情况,而同等规模的真实测试需耗时6个月,研发效率提升了20倍以上。目前,Apollo仿真平台已服务全球数万名开发者,成为推动国内自动驾驶技术创新的重要基础设施。
除了头部企业,开源仿真平台也在快速迭代。CARLA、SUMO等平台纷纷融入AI技术,CARLA支持基于GAN的场景生成与基于RL的智能体训练,SUMO则通过AI优化交通流模拟,为中小企业与科研机构提供了低成本的仿真测试方案。
3.2 落地闭环:从仿真到真实的全流程链路
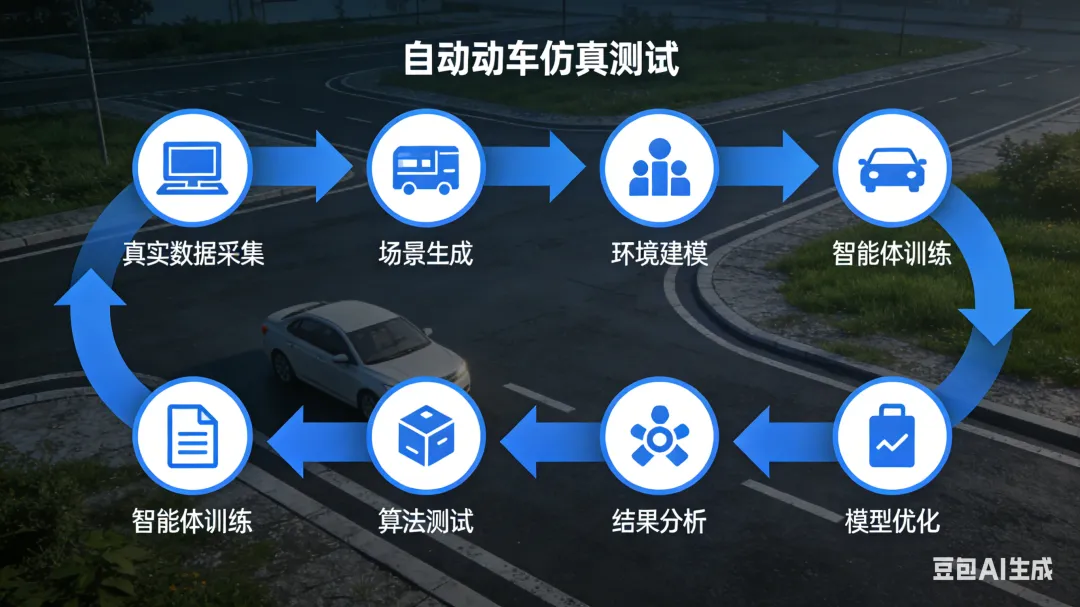
AI仿真测试要真正赋能无人车落地,需构建“数据采集-场景生成-算法测试-优化迭代-真实验证”的闭环体系,确保仿真结果能有效指导真实测试。具体流程如下:
1. 数据采集与预处理:通过真实测试车辆、路侧设备、监控视频等渠道,收集道路图像、激光雷达点云、交通参与者轨迹、传感器噪声等数据,经清洗、标注后,作为AI模型的训练样本。
2. AI驱动场景与环境构建:基于采集的数据,用GAN生成逼真场景,用RL生成动态场景,用VAE、GNN等技术构建高保真环境模型与智能体模型,搭建与真实环境一致的虚拟测试场景。
3. 算法部署与测试:将无人车的感知、决策、控制算法部署到虚拟环境中,开展大规模自动化测试,记录算法的避障成功率、碰撞率、响应延迟等指标。
4. 测试结果分析与优化:用AI算法分析测试数据,定位算法薄弱环节,如感知算法对雾天障碍物的误判、决策算法对极端场景的应对不足等,针对性优化模型参数与逻辑规则。
5. 真实验证与迭代:将优化后的算法部署到真实测试车辆,进行小规模道路测试,验证仿真结果的真实性;同时将真实测试中发现的新场景、新问题反馈到仿真平台,补充训练数据,迭代AI模型与测试场景,形成闭环。
3.3 痛点破解:应对仿真鸿沟与场景覆盖难题
尽管AI大幅提升了仿真测试的真实性,但“仿真鸿沟”与场景覆盖不全仍是行业核心痛点,企业通过多种AI技术组合,逐步攻克这些难题。
针对“仿真鸿沟”,迁移学习与域适应技术成为核心解决方案。迁移学习可将仿真环境中训练的模型,通过真实数据微调,快速适配真实环境;域适应技术则通过GAN等模型,将虚拟传感器数据转换为真实数据风格,让模型在仿真训练中就能适应真实数据分布。数字孪生技术的深度应用,更实现了虚拟与真实环境的实时联动,让仿真环境随真实路况动态调整,最大限度缩小两者差异。
针对场景覆盖不全,因果推理与众包结合的方式效果显著。因果推理可分析真实事故数据,挖掘事故背后的因果链,如“暴雨→路面湿滑→货车刹车失灵→变道→行人闯红灯”,进而生成类似的复杂长尾场景;众包模式则鼓励开发者、测试人员、普通用户提交真实遇到的罕见场景,通过AI技术将这些场景转化为虚拟测试场景,不断丰富场景库。
四、未来展望:AI仿真的技术演进与行业影响
随着AI技术的持续迭代,自动驾驶仿真测试将向更智能、更高效、更通用的方向发展,不仅将重塑自动驾驶研发体系,还将推动整个行业的生态变革。
4.1 技术发展三大趋势
趋势一:多模态AI融合提升仿真保真度。未来,LLM、GAN、RL、GNN等多模态AI技术将深度融合,LLM负责场景需求解析与逻辑生成,GAN负责视觉场景渲染,RL负责动态交互控制,GNN负责物理规律模拟,形成全方位、高保真的仿真系统,实现“虚拟与真实无差别”的测试体验。
趋势二:联邦学习打破数据壁垒。自动驾驶场景数据具有极强的隐私性与地域性,企业难以共享。联邦学习可在不泄露原始数据的前提下,实现多企业、多区域场景数据的联合训练,让AI模型学习更丰富的场景特征,生成更全面的测试场景,解决单一企业数据不足的问题。
趋势三:轻量化与云端化拓展应用场景。通过AI模型轻量化技术,可将仿真测试部署到边缘设备,支持车载实时仿真;云端仿真平台则可利用大规模算力,实现万级场景并行测试,大幅提升测试效率,让中小企业也能享受低成本、高效率的仿真服务。
4.2 潜在挑战与应对方向
尽管前景广阔,AI仿真仍面临三大挑战:一是仿真真实性的极限,无论技术如何优化,虚拟环境都难以完全复刻真实世界的所有细节,如行人的微表情、司机的情绪波动等;二是AI模型的偏见问题,若训练数据存在偏差,AI生成的场景与智能体行为也会出现偏见,影响测试准确性;三是法规与伦理争议,仿真测试结果能否作为无人车上路许可的依据,仍需完善的法规体系支撑。
应对这些挑战,需要技术与行业协同发力:技术层面,通过多源数据融合、模型迭代优化,不断提升仿真真实性,减少模型偏见;行业层面,推动建立仿真测试标准与认证体系,明确仿真结果的法律效力,规范行业发展。
4.3 对行业的深远影响
AI仿真测试的普及,将彻底改变自动驾驶行业的研发模式与商业节奏。从成本端看,真实道路测试成本将降低50%以上,大幅降低行业准入门槛,吸引更多中小企业参与技术创新;从效率端看,算法迭代周期将从“年”缩短到“月”,加速L4级无人车的商业化落地,预计到2030年,高阶自动驾驶将在特定场景(如港口、园区、城市主干道)实现规模化应用;从安全端看,仿真测试可覆盖99%以上的极端场景与长尾场景,让无人车的事故率降低70%以上,为行业发展奠定安全基础。
五、总结与思考
自动驾驶的商业化落地,从来不是单一算法的胜利,而是研发、测试、运维全体系的协同突破。AI赋能的自动驾驶仿真测试,通过解决真实测试的成本、安全、场景三大痛点,成为连接算法研发与工程落地的核心桥梁。从GAN生成的逼真场景,到RL驱动的动态交互,再到数字孪生实现的虚实联动,AI技术正在让虚拟试车场具备“无限试错、精准复刻、高效迭代”的能力,让无人车在走向真实道路前,就能练就应对复杂环境的“真本事”。
未来,随着AI技术与仿真测试的深度融合,我们有理由相信,“仿真替代80%真实测试”将成为现实,无人车将更快走进大众生活,重构交通运输体系。而对于行业从业者而言,掌握AI与仿真测试的融合技术,将成为立足行业的核心竞争力——或许下一个推动自动驾驶突破的关键创新,就诞生于AI构建的虚拟世界之中。
参考资源:Waymo Open Dataset技术报告、百度Apollo仿真平台白皮书、《Generative Adversarial Nets》《Proximal Policy Optimization Algorithms》经典论文、CARLA开源平台技术文档、《Reinforcement Learning: An Introduction》教材。
【声明】本文部分内容由人工智能技术生成,经人工审核、润色及补充完善后发布,旨在为读者提供有价值的技术参考。文中核心观点与技术解析均结合专业知识校验,若存在疏漏,欢迎批评指正



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
