大.家.好。今天咱们来聊一.个最近评论区挺多人问的话题——自动驾驶里的4D毫米波雷达,在下雨下雾这种天气里.是不是真的更.靠谱?我.这.两天西安正好阴沉沉的,一路儿都是雾气,看这个话题.就特别.有代入感。
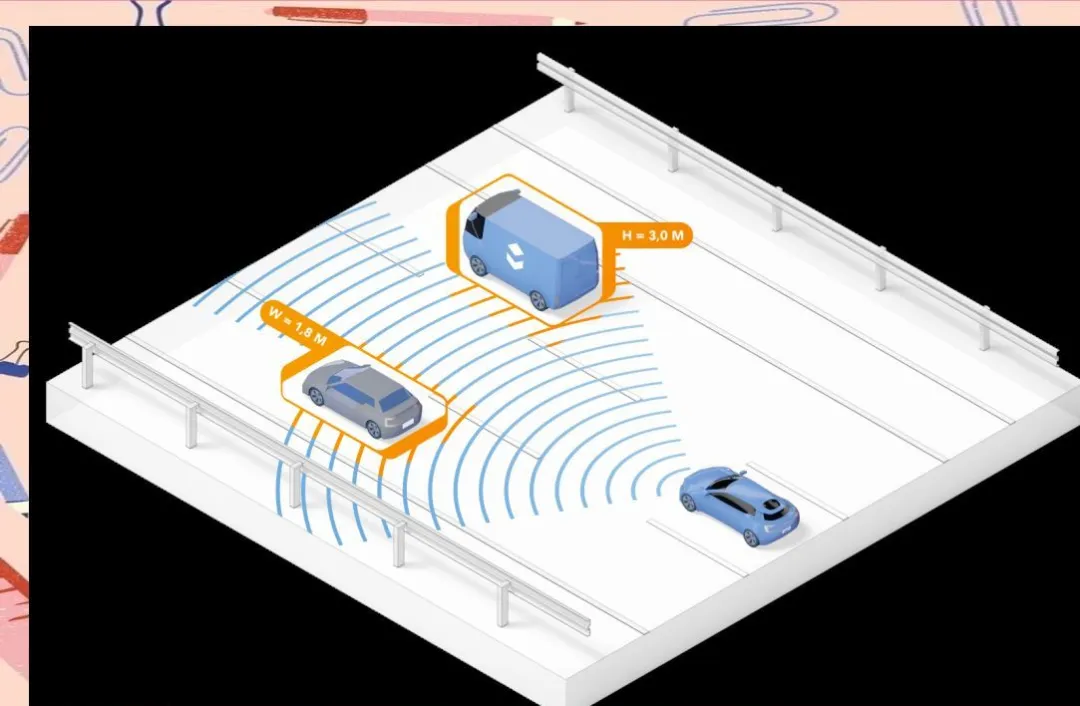
先.简单说下,4D毫米波雷达这.个“4D”,它不是电影.那种4D哈,它是指除了测距.离、速度、水平角,还能测高度。也就是.说,它能知道目标是高是低,是不是个.小动.物还是骑电动车的人,或者是个卡.车。这也.是它比传.统雷达.厉害的地方。

以前咱们开的车上用的那种普通毫米.波雷达,角度分辨率.一般.只有十几度,探.的物体分不细。比如它可能知道.前面有个障.碍物,但.不知道那是.轮胎还是井盖。而4D雷.达可.以精细到1度左右,探测.距离能到300米.开外。听起来挺夸.张的,但真.上车测.试过的人都知道,它那种点云成像效果有点像“简化版激光雷达”,密密麻麻.的点儿,一下就能看出形状。
那.它为什么在雨雾天.更占.优势呢?其实核心原因.是毫米.波这种波段,它能.穿透水汽和雨滴。不像摄.像头.那样一遇到.雾.就“白茫茫一片真干净”,啥都看不见。尤其在刮风下雨的高速场景,一般纯视.觉的系统早就报废了,但雷达还能.探测得很.稳定。
我前两天试了一台车,它搭载的是几何伙.伴的新款4D毫米波雷达,那.玩意每秒能输出六万多个点云信号,特别.密。下小.雨.那天我故意往.车前放了个.行李箱,肉眼已经有点模糊,但系统还能识别出那是个静止的障碍物,AEB提前介入——这个真挺神。
当然,要.说.完美吧.也没有。它的成本现在.还挺高,一颗雷达大概三百美元左右,比激光雷.达便宜不少,但也比普通.毫米波贵多了。有些车.企.为了省钱,可能前面配一个4D,侧面和后.面还是老式的3D雷达。这个在混合使用的时候,感知融合算法得够聪明,不然会出现.识别不.同步.的.情况。
另外我得说句实话,4D雷.达虽.然厉.害,但它不.是万能的。下暴雨的时候,它确实比摄像头.强,但对那.种地面.反光的情况,还是可能判断错误,比如.水坑、路沿这种。那时.候.就得.靠算法补。
不.过.从趋势上看,这玩意.现在.真是“起飞”状态。欧洲、北美很多L2+、L3级别的车.都开始.标配,我看预测2025年国.内的前装量能占40%以上,增长速度相当夸.张。到时.候可能你.五六十万的高阶智驾车.都用上4D雷达了。

其实我个人更期待.的是以后“视觉+4D雷达”融合方案,这个是.真正靠.谱.的方向。激光.雷达太贵,摄像头.怕天.气,这俩加在一起好像谁都能补.谁的短处,但4D雷达融进去之后,感知系统的底线就被“托底”了。就.是哪怕天再烂,它还.是能知道.前面有啥。对于自.动驾驶来.说,这是真正的安全.底线。
我.总结一句话——在雨雾天.气.下,4D毫米.波雷达确实更有优势,不是玄学是真的物理上的能力差距。不过!它想替代激光.雷达.那还得再等等,算法.生态还没完全跟上。要真.实.现像人一样的.感知,可能还得两三代产品。
好啦,今.天.这期就.聊到这。你们觉得4D雷达有.机会成为以.后车.企的新标配吗?评论区聊.起.来。文章写作.不易,还望.大家多多支持,点赞评论收藏一下,感谢大.家。

