
Trans小编导读
自动驾驶卡车队列在多承运人、多车型、复杂环境下的协同部署面临任务同步、队列形成与收益分配等挑战。香港大学团队提出了一种数字孪生(DT)驱动的合作式自主卡车队列框架,该框架集成了多目标优化模型、车辆运动学与动力学模型以及实时控制策略。研究通过求解算法与实证验证,证实了该框架能够显著节约成本并增强承运商间的协作。
基本信息
标题:Digital twin-enabled cooperative autonomous truck platooning framework for modeling, cost estimation, and decision-making in transportation systems「数字孪生驱动的合作式自动驾驶卡车编队框架:用于交通系统中的建模、成本估算和决策制定」
作者:Xinyue Guo, Yi Li, Songyi Cui, Ray Y. Zhong
期刊:Transportation Research Part E: Logistics and Transportation Review
链接:10.1016/j.tre.2025.104596
研究亮点
- 提出了一种综合性的数字孪生(DT)框架,该框架将高层级的多目标优化(任务分配、队列形成)与底层的车辆物理模型(运动学、动力学)及自适应控制策略进行深度融合。
- 开发了一种高效的资源导向分解(RDD)算法,用于求解多承运商场景下的卡车队列形成问题,相较于传统方法在求解大规模问题时展现出卓越的计算速度和可扩展性。
- 通过基于真实世界跨境物流数据的案例研究,量化验证了框架的实际应用价值,证实其能够带来10-14%的显著能耗节省,并提升了运营的可靠性。
论文摘要
合作式自动驾驶卡车(CATs)在实现物流智能化和自动化方面发挥着关键作用。然而,涉及多个承运商、多样化的自动驾驶卡车和复杂的运输环境,给大规模部署带来了巨大挑战。本研究提出了一种数字孪生(DT)驱动的CAT框架,以应对这些挑战,包括运输任务同步、编队形成和收益估算。该框架由三个相互关联的组成部分构成:(i)一个用于CATs编队的多目标混合整数规划(MOMIP)模型,旨在优化任务分配和决策制定;(ii)支持实时同步和能量估算的数字孪生驱动的运动学和动力学模型;以及(iii)用于连接优化与实际实施的实时控制和通信拓扑。本研究引入了一种资源导向分解(RDD)算法,通过问题分解和应用分离松弛来高效求解MOMIP模型。数值验证表明,当MOMIP具有两个以上目标时,RDD算法比ϵ-约束法收敛速度显著更快。CATs编队相较于传统人工驾驶卡车可实现约10-14%的能源节约,并且所提出的带有DT同步的自适应控制能有效确保紧急制动场景下的安全性。利用一个真实世界的跨境建设物流项目数据进行的实证验证表明,该框架能实现成本节约并增强承运商兼容性。
1. 研究动机
合作式自动驾驶卡车(CAT)队列通过减小车头时距、协同速度控制,能够显著降低能耗、提升道路安全,在长途物流和大规模建材运输等领域展现出巨大潜力。然而,尽管车辆控制、通信等关键技术已取得进展,但在真实物流网络中的规模化应用仍受制于多重障碍。
当前研究的核心痛点在于缺乏有效的信息共享与协同决策机制。物流运输行业具有高度分散的特点,涉及多个独立的承运商,导致了严重的“信息孤岛”问题。现有研究的不足主要体含现在:
- 任务匹配与同步困难:由于缺乏跨承运商的协调,运输任务难以同步,错失了大量潜在的队列形成机会。
- 队列形成复杂性高:不同车辆的类型、货物需求及运营约束各异,使得卡车无缝编队成为一项挑战。
- 收益分配与激励不足:队列中的燃油节省并非均匀分布,领头车通常能耗更高,这种不均衡性削弱了各方参与合作的积极性。
为应对上述挑战,本文引入数字孪生(DT)技术,构建了一个集建模、成本估算和决策于一体的综合性框架。该框架旨在通过虚拟空间中的实时映射、仿真与优化,打破物理世界的协作壁垒,为多承运商场景下的CAT队列运营提供一个透明、高效、公平的协同决策平台。
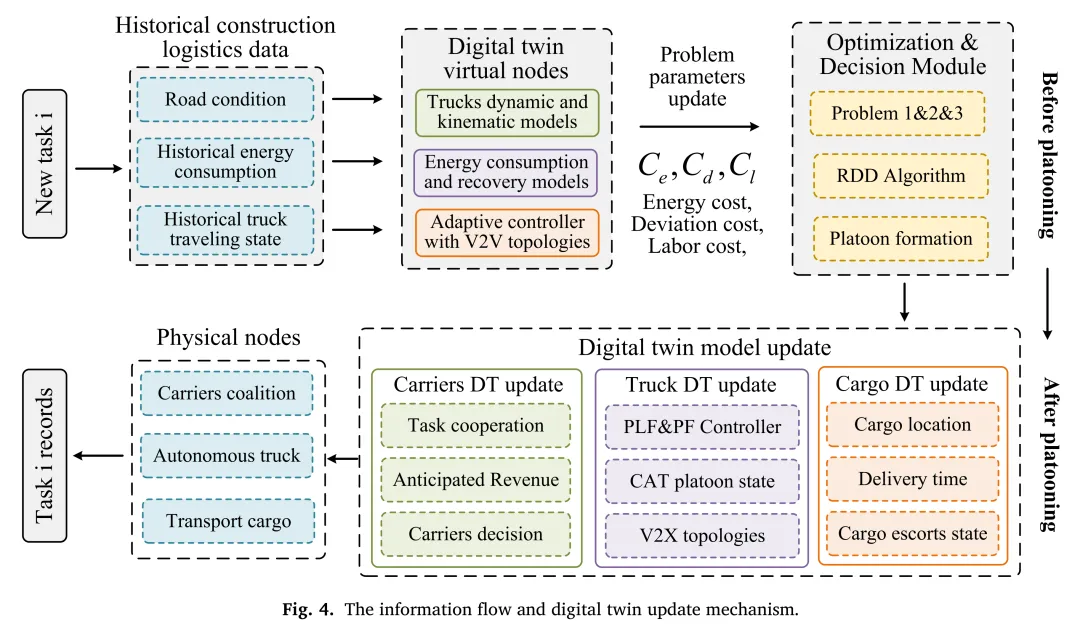
2. 研究方法
本文提出的数字孪生驱动的合作式自动驾驶卡车队列(DT-enabled CAT platooning)框架,旨在整合高层级的物流任务规划与底层的车辆实时控制。该框架主要包含三个相互关联的核心部分:用于任务分配与决策的多目标混合整数规划(MOMIP)模型,用于实时同步与能耗估计的数字孪生模型,以及连接优化与实际执行的实时控制与通信拓扑。通过历史物流数据的校准,该框架能够实现动态、精确的协同决策。
数字孪生驱动的协同物流网络
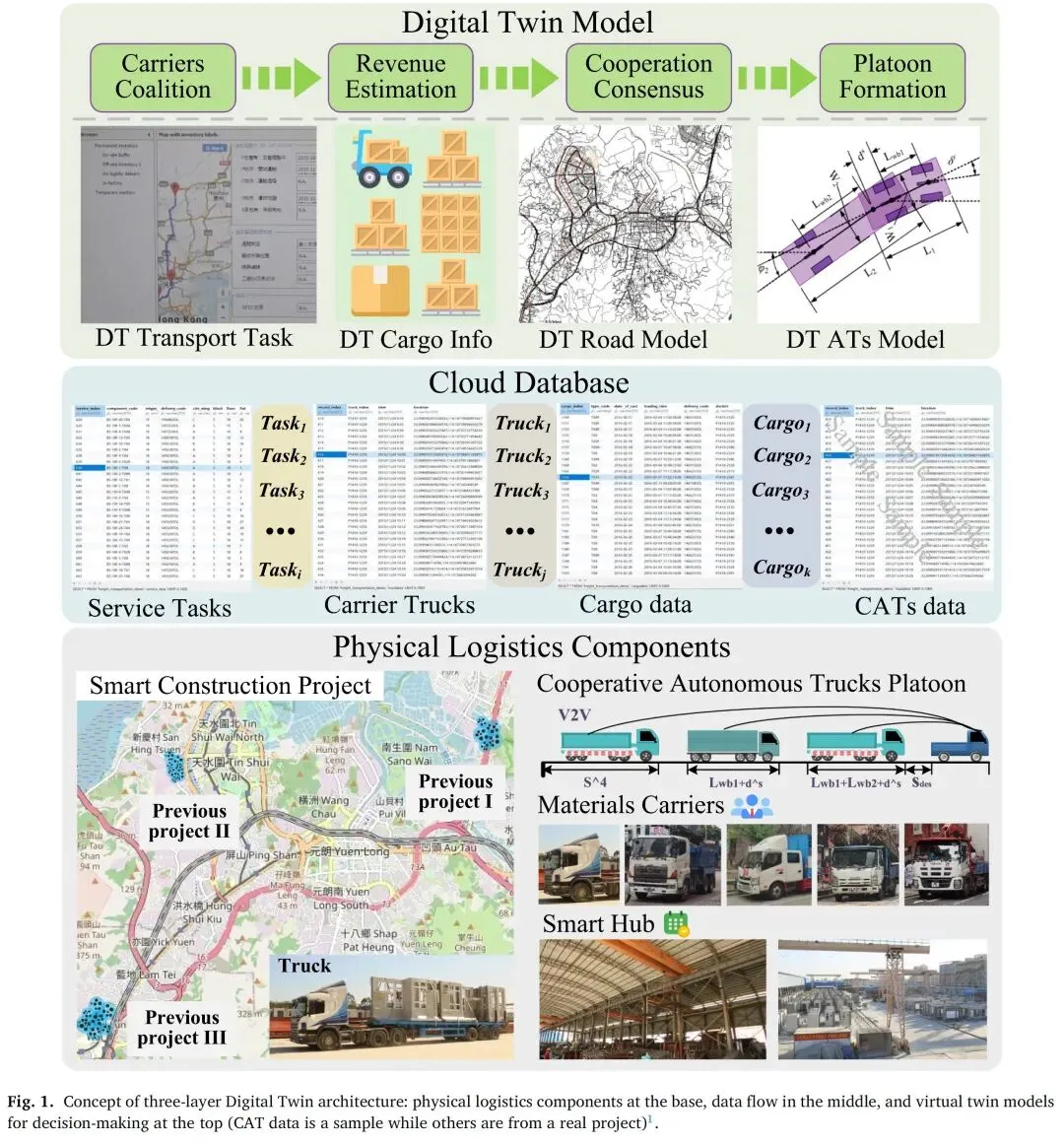
为统一描述复杂的物流运作,研究构建了一个三层数字孪生架构,包含物理物流组件、数据流和虚拟孪生模型。在此基础上,引入一个多层图模型 来表征CAT的运营,其中V代表所有节点(承运商、卡车、货物),而三个层分别对应:
- 承运商-服务联盟层:权重矩阵 表示承运商与物流任务间的合作程度。
- 队列形成层:权重矩阵 表示运输任务到具体车辆的分配情况。
- 协同卡车控制层:权重矩阵 反映了车辆间(V2V)的通信拓扑和协作关系。
通过分析多层图的拉普拉斯矩阵 ,可以评估整个系统的连通性、同步可行性以及跨层数据共享对能耗的影响,从而为动态任务分配和队列管理提供理论依据。
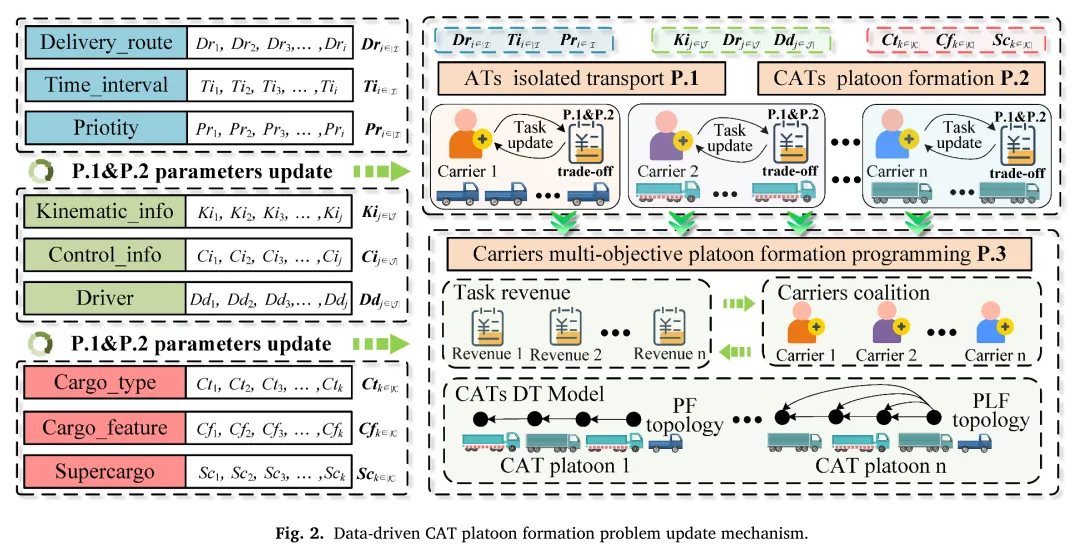
多目标优化与任务分配
物流服务的成本被分解为三个主要部分:能耗成本()、交付偏差成本()和人力成本()。这些成本函数考虑了车辆是否处于队列状态(isolated, pf),并与车辆的运动学特性、控制算法、货物属性、路线长度等参数关联。
- 能耗成本:取决于车辆能耗因子、路线长度以及是否参与队列(队列可节省能耗)。
- 交付偏差成本:惩罚早于或晚于预定时间窗口 的交付行为。
- 人力成本:包括司机和货物护送员的成本,当多辆卡车形成队列时,护送员成本可以共享。
基于此,研究分别构建了针对独立运输(P.1)和队列运输(P.2)的成本最小化问题。进一步地,为解决涉及多个运输任务的复杂决策场景,提出了一个多目标混合整数规划(MOMIP)模型(P.3),旨在同时最小化所有任务的总成本,同时满足全局资源(如可用卡车数量)的约束。
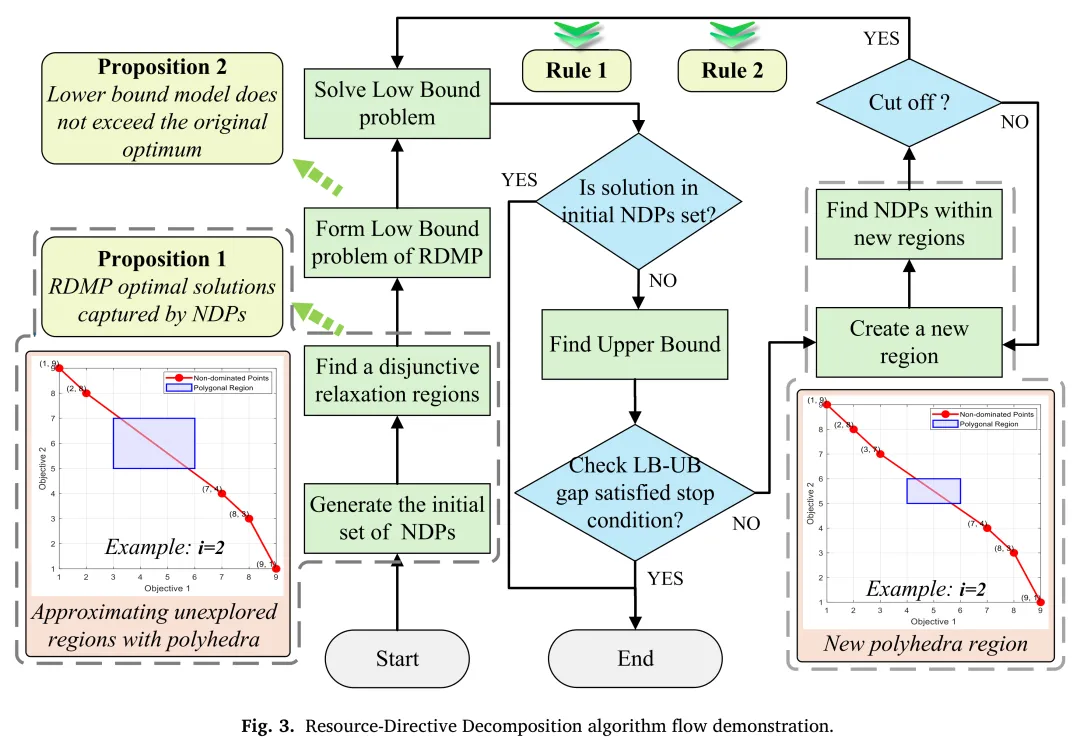
资源导向分解(RDD)算法求解
为高效求解上述具有松散耦合特性的大规模MOMIP问题,本文提出了一种资源导向分解(Resource-Directive Decomposition, RDD)算法。该算法将原问题分解为一个资源导向主问题(RDMP)和一系列独立的资源导向子问题(RDSPs)。
- RDMP:负责在全局层面将有限的资源(如卡车)分配给各个运输任务(子问题),目标是最小化所有任务的总成本。
- RDSPs:在给定资源限制下,为单个任务求解最优的执行方案(如是否形成队列、选择哪些卡车)。
该算法通过迭代求解主问题和子问题,并利用非支配前沿(NDF)来离散化子问题的解空间。同时,设计了两条剪枝规则(Rule 1和Rule 2)来剔除次优和不可行的解空间区域,从而显著提升了算法的收敛速度和计算效率,使其能够胜任大规模、动态的物流决策需求。
车辆动力学建模与自适应控制
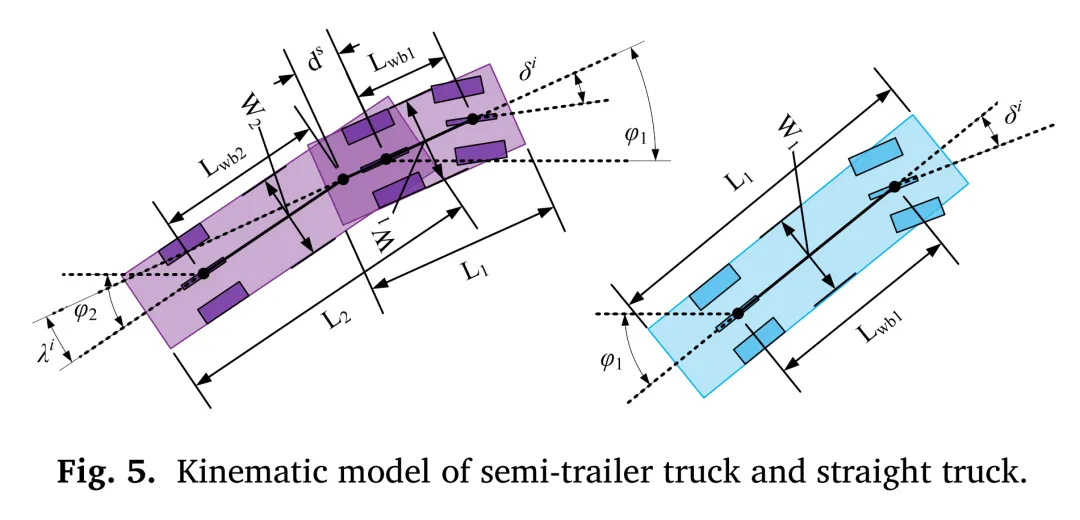
为了使数字孪生模型能精确反映真实车辆状态,研究建立了半挂卡车的运动学与动力学模型。运动学模型描述了牵引车和半挂车的位置、姿态和偏航角变化,而动力学模型则通过纵向力平衡方程 来计算车辆加速度,其中考虑了轮胎力、坡度阻力、滚动阻力和空气阻力。这些模型为实时状态同步和精确的能耗估算提供了物理基础。
此外,针对异构卡车队列在参数不确定、通信延迟等条件下的稳定运行问题,设计了一种基于拓扑的自适应控制器。该控制器能够根据实时路况和车辆状态动态调整控制策略,确保队列在紧急减速等场景下仍能保持安全车距和速度同步,实现了燃油效率与运行安全的平衡。
3. 核心结论
本研究通过数值仿真和真实世界案例研究,系统性地验证了所提出的数字孪生驱动的CAT队列框架的有效性。
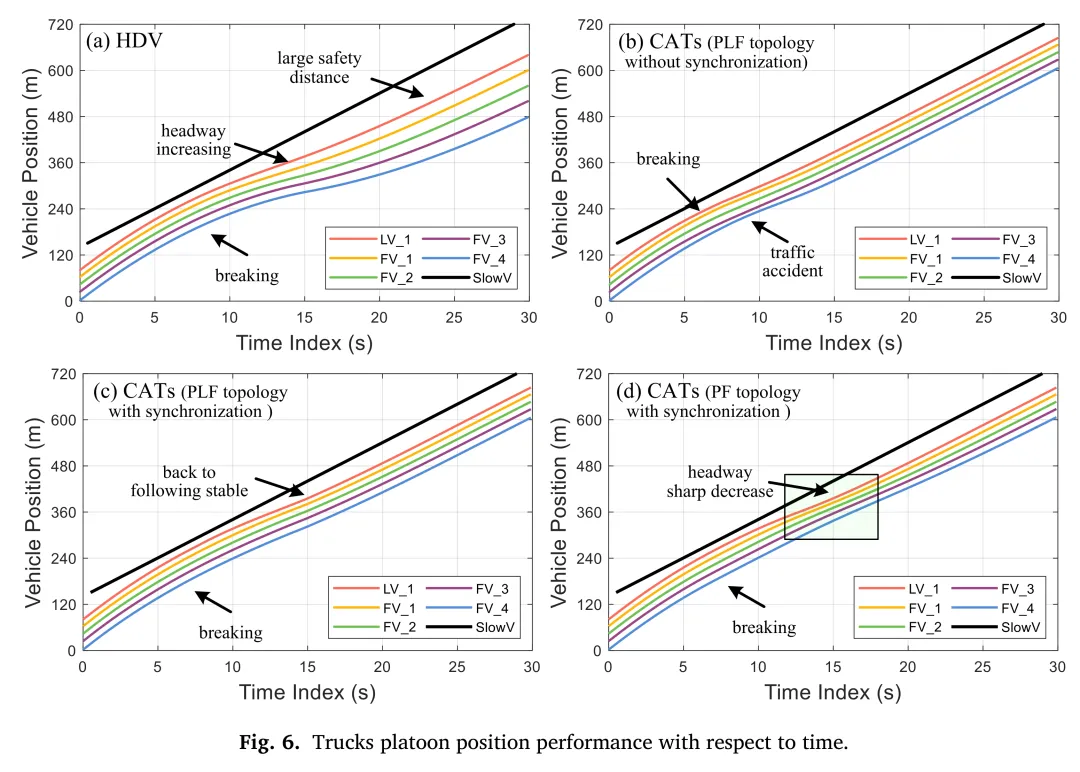
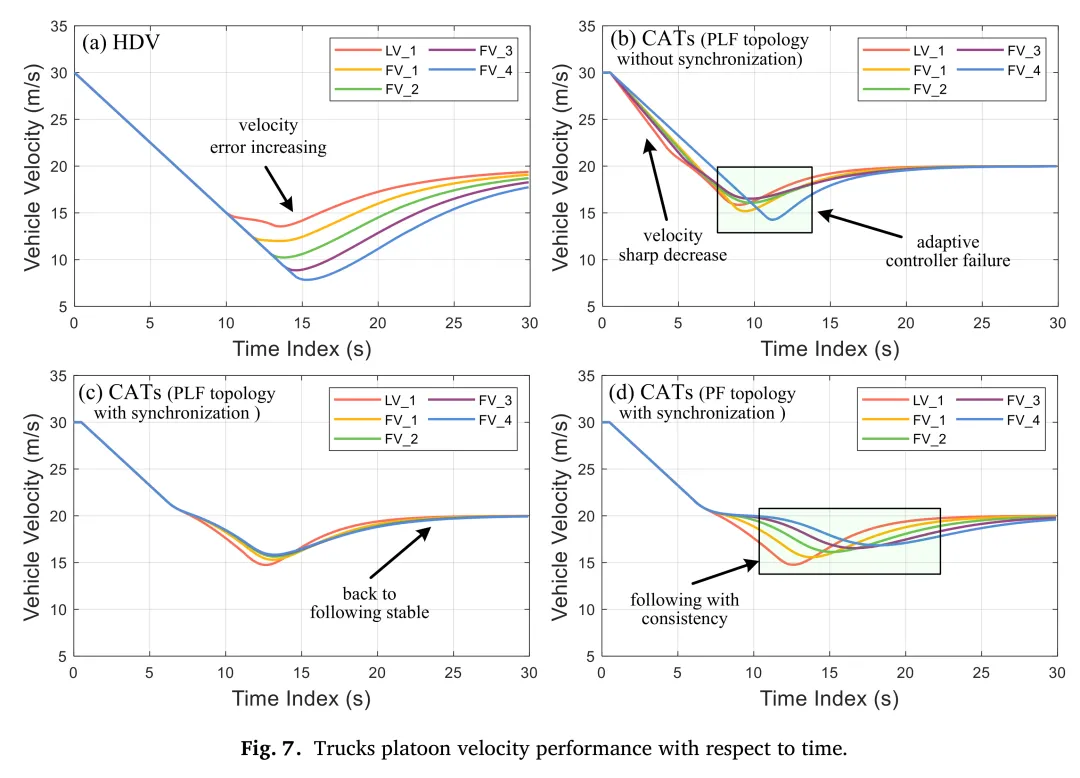
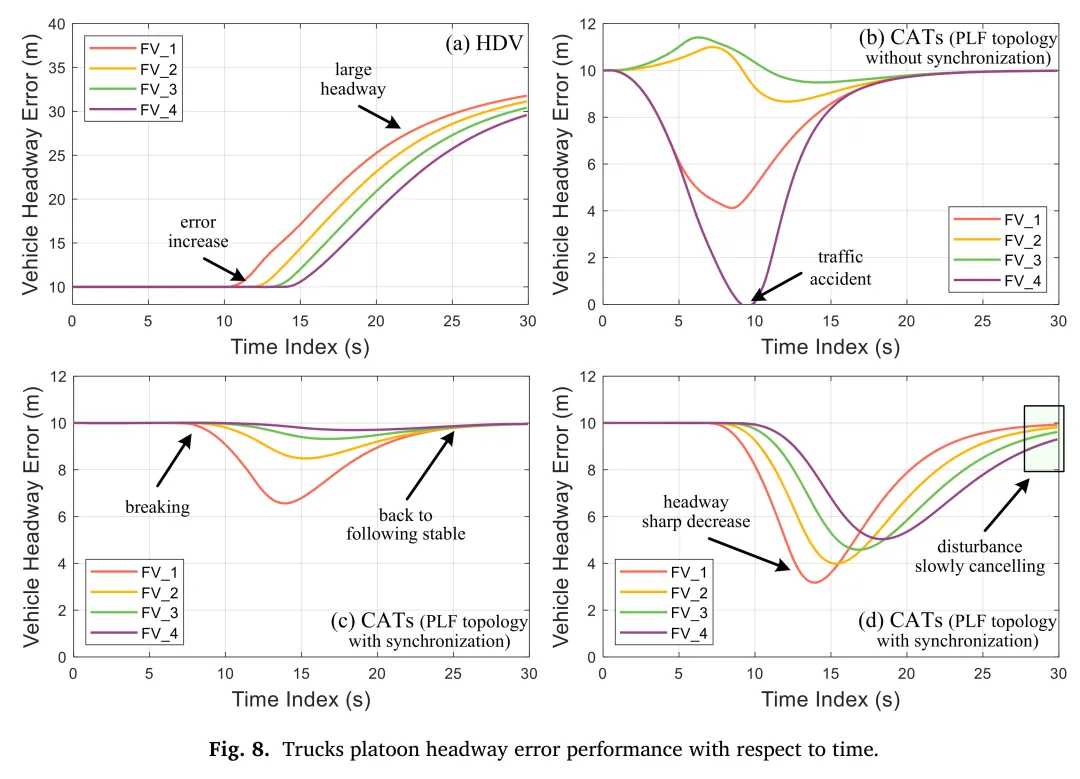
首先,数字孪生同步机制显著增强了队列的稳定性和安全性。在紧急减速场景的仿真中,与人类驾驶车辆(HDV)和无DT同步的CAT相比,启用DT同步的CAT队列表现出最小的位置波动、最平滑的速度曲线和最稳定的车头时距误差。这表明实时的车辆状态与货物信息共享能够实现更精准的预测和协同控制,从而有效规避风险。
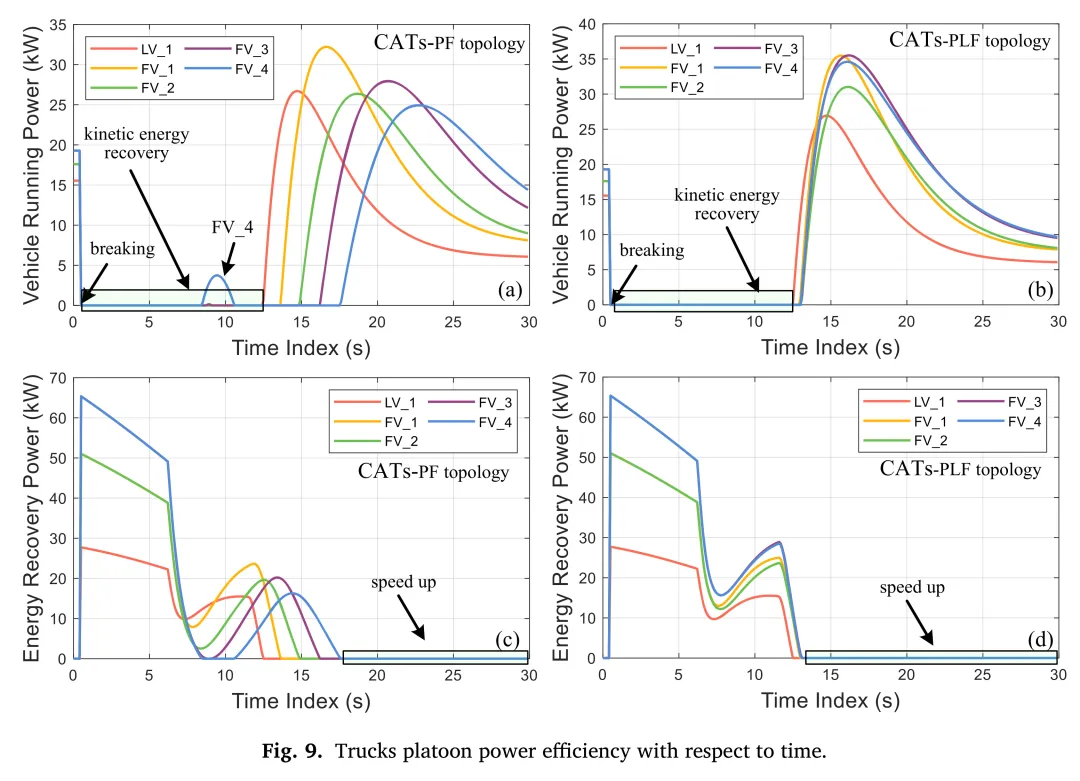
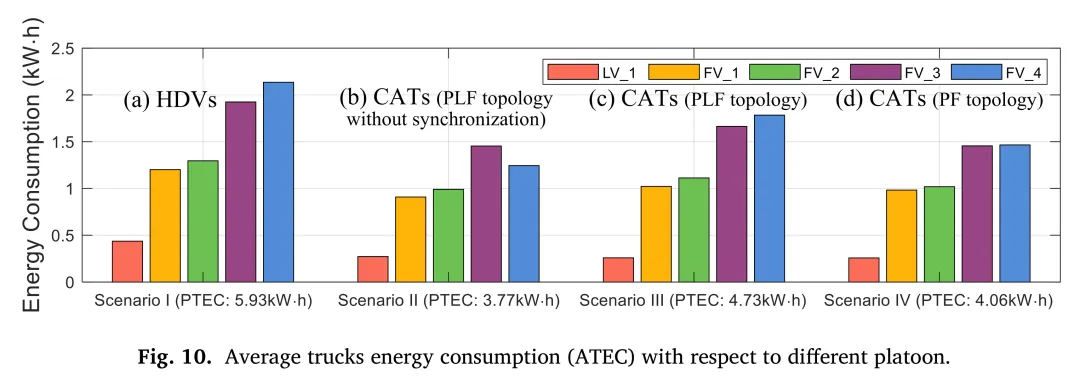
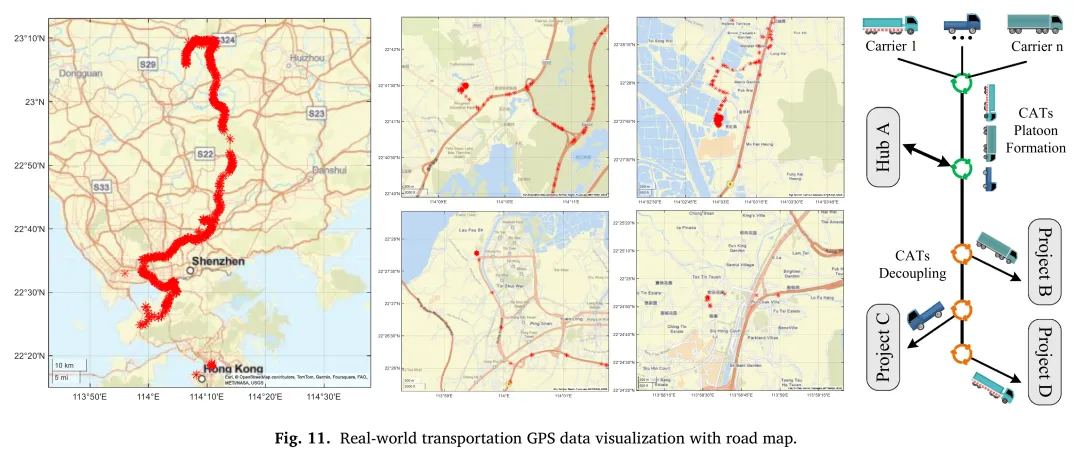
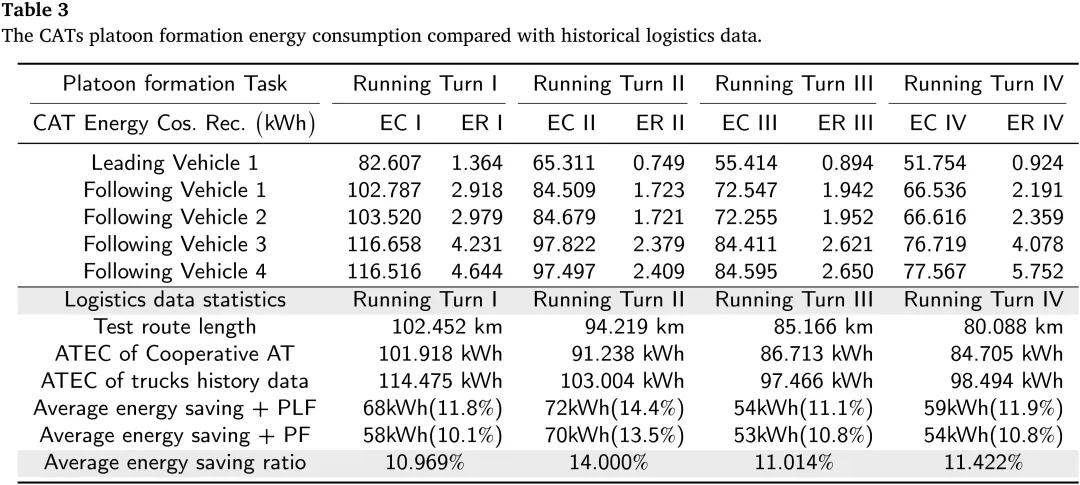
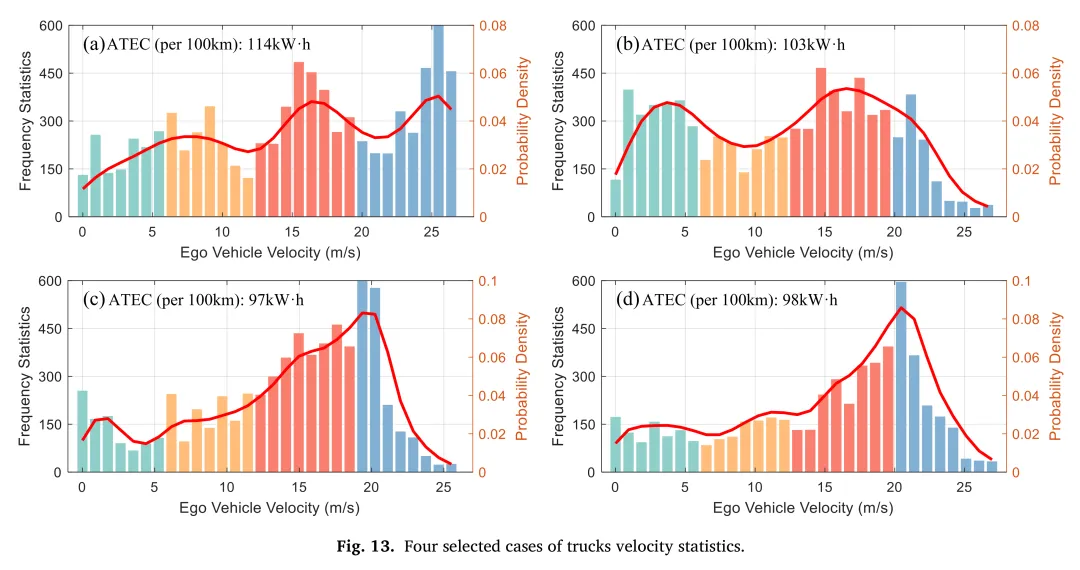
其次,合作式卡车队列能够带来显著的经济效益。基于一个为期四个月的深港跨境建设物流项目的真实数据进行的案例分析表明,与历史上的HDV运营数据相比,采用CAT队列模式可实现 10%至14% 的平均能耗节省。这主要得益于队列形成的空气动力学优势以及通过优化算法实现的更平稳驾驶模式。随着运行轮次的增加,总能耗(ATEC)稳步下降,证明了框架在持续运营中的节能潜力。
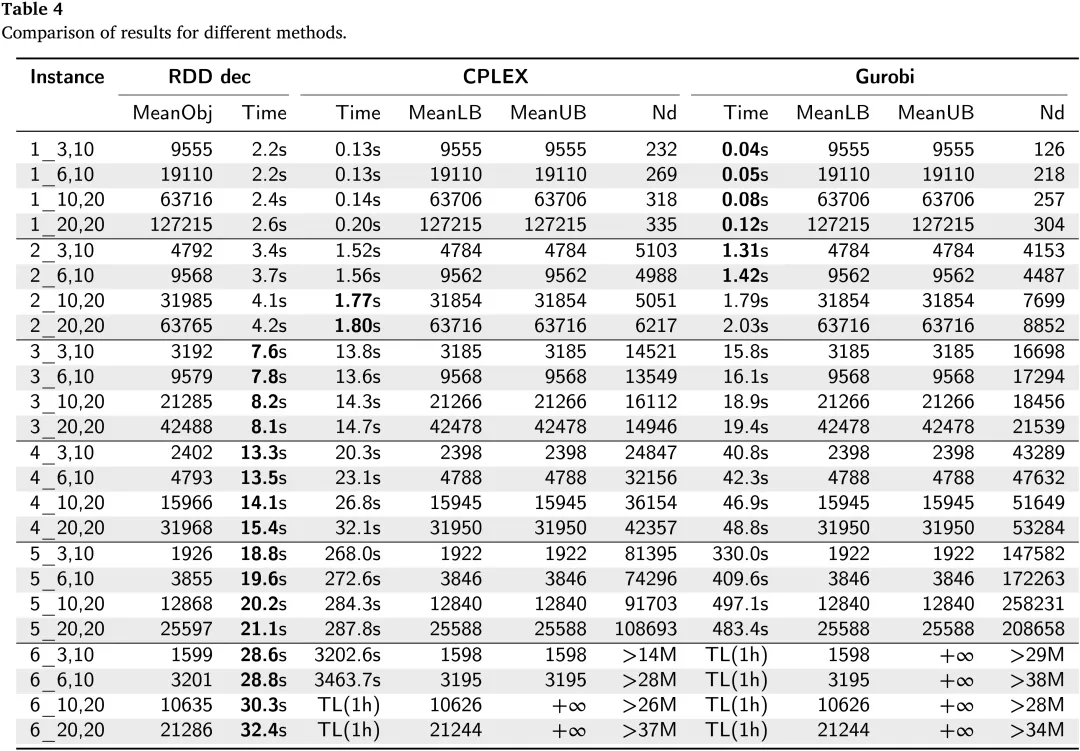
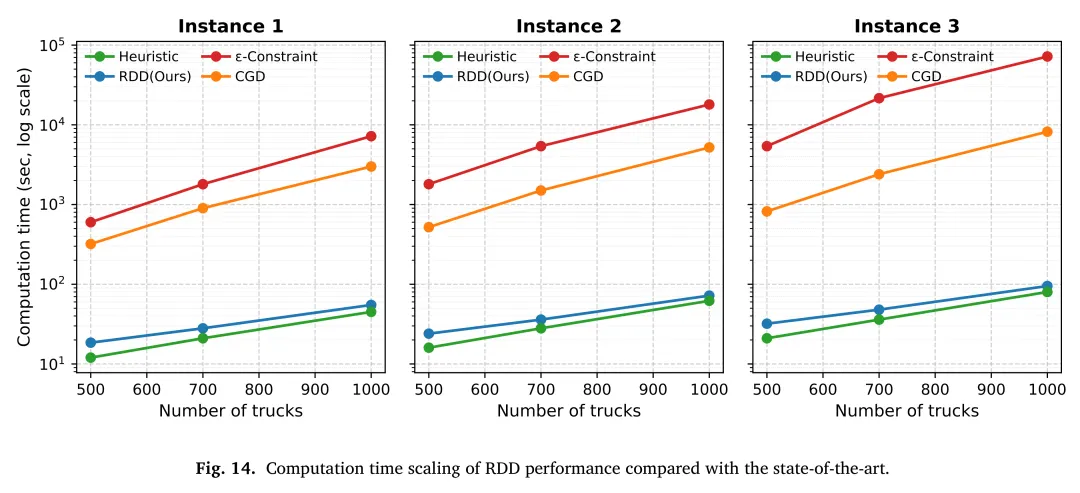
最后,本文提出的资源导向分解(RDD)算法在计算效率上表现卓越。与采用商业求解器(如CPLEX、Gurobi)的传统ε-约束方法以及列生成等算法相比,RDD算法在处理大规模、多目标的队列形成问题时,求解速度显著更快,并且具有近线性的可扩展性。例如,在某些复杂实例中,当其他方法超过1小时时间限制时,RDD仍能在约30秒内找到高质量解。这一优势使其非常适用于需要快速响应的动态物流规划场景。
4. 研究展望
未来的工作将聚焦于几个关键方向的深化与拓展。首先,将进一步优化控制算法,以更好地平衡能量效率和控制性能,特别是在动态和复杂的道路条件下。其次,计划通过集成更多样化的道路条件数据(如实时交通流和天气信息)来改善数字孪生的同步精度,从而实现更准确的能耗预测。此外,将致力于完善动态队列形成和实时调度的协同服务机制。最后,计划与行业伙伴合作开展大规模的真实世界实验,以验证和扩展该框架,确保其在实际货运物流中的可扩展性和适用性。
其他图表
< Fin >


